本文分享OpenSBI串口驱动相关的实现,并实践添加自己的串口驱动。
整个框架如下

要了解串口驱动的相关结构,最好的方式是从Kconfig和Makefile入手,看到底编译了哪些文件,结构是怎么样的。https://mp.weixin.qq.com/s/941A4li9L6kq1QB-fuyuVA opensbi单独构建与GDB仿真调试一文中介绍了Kconfig的结构。这里重点关注串口驱动相关的。
输入如下命令进入配置界面:
make PLATFORM=generic menuconfig
如下路径
Utils and Drivers Support --->
Serial Device Support--->
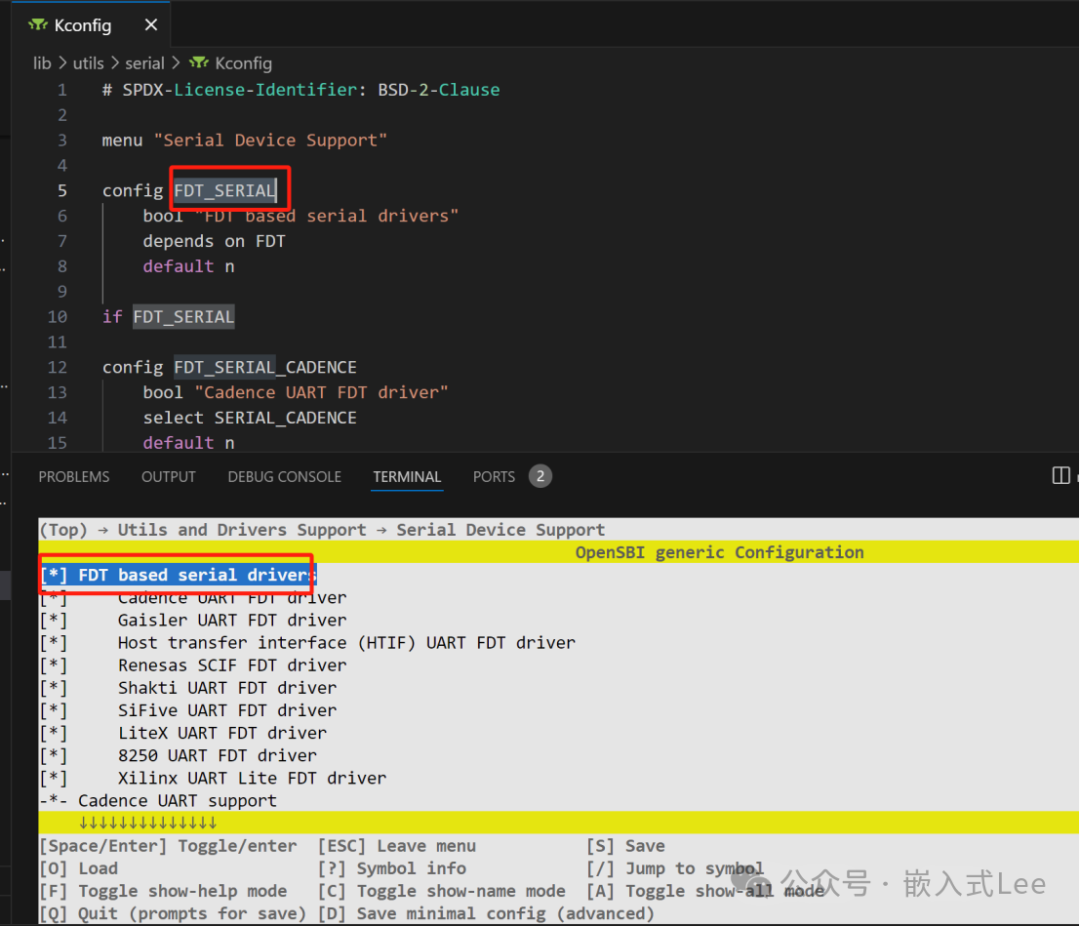
对应的文件就是lib/utils/serial/Kconfig
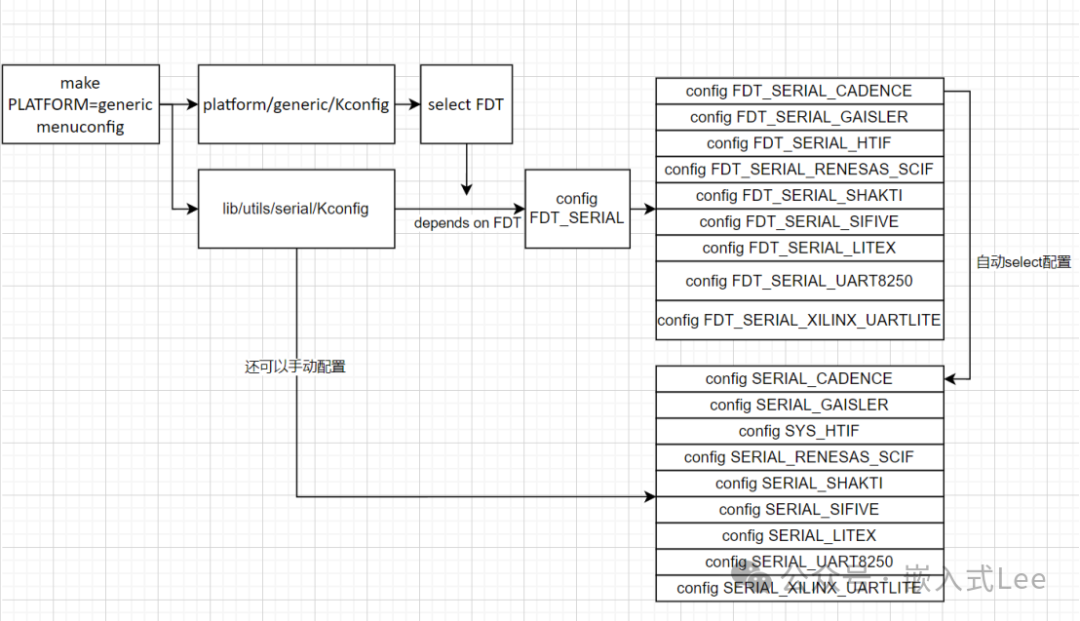
该Kconfig下,首先有个总的配置FDT_SERIAL,该配置选中,下面才会有各个driver选择。
FDT_SERIAL依赖于FDT配置。
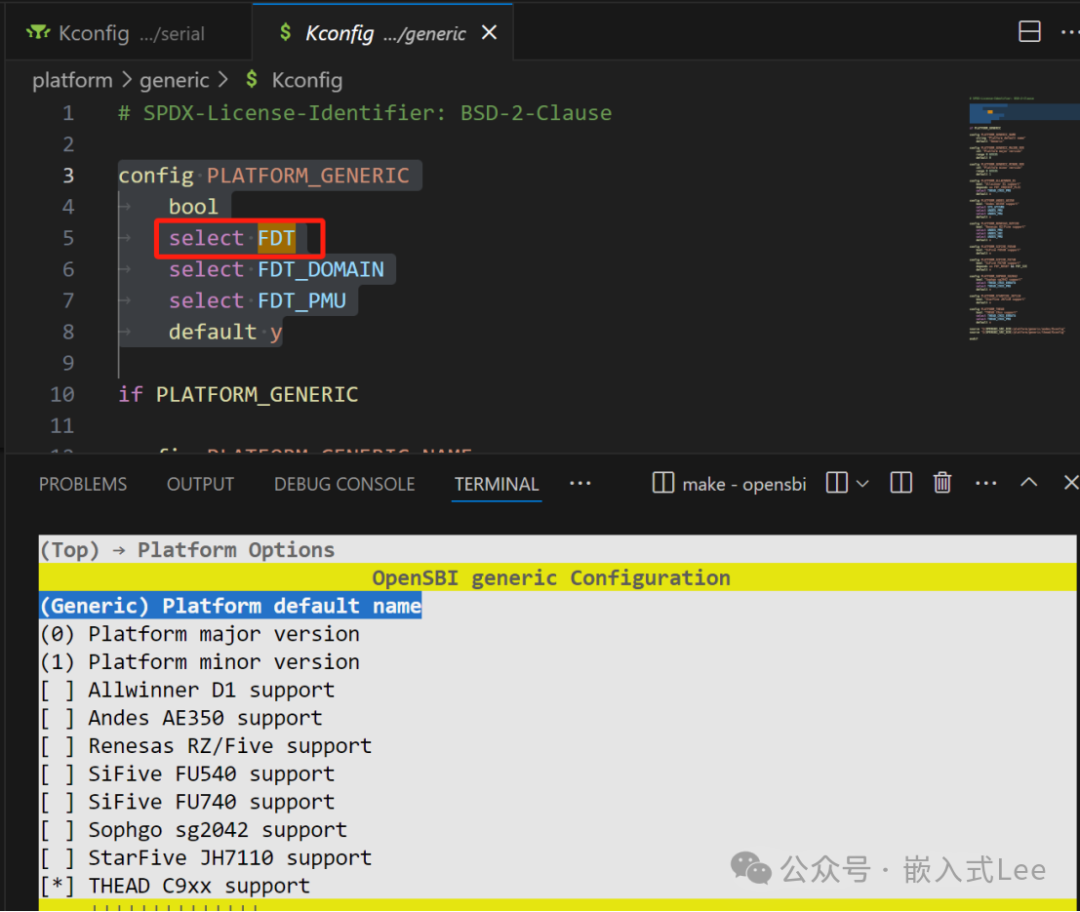
而FDT配置是在platform/generic/Kconfig中,选中平台时自动选中的(make PLATFORM=generic menuconfig时自动选择的是platform/generic/Kconfig)。
Platform options --->
选中某个driver配置时,自动会select对应的串口底层实现
比如选中config FDT_SERIAL_CADENCE时自动选择select SERIAL_CADENCE。
lib/utils/serial/objects.mk中就会根据上述Kconfig配置,是否添加对应的c文件进行编译。
libsbiutils-objs-$(CONFIG_FDT_SERIAL) += serial/fdt_serial.o
libsbiutils-objs-$(CONFIG_FDT_SERIAL) += serial/fdt_serial_drivers.carray.o
fdt_serial.c始终会编译
fdt_serial_drivers.carray.c是脚本自动生成的,后面介绍
如下驱动代码按照配置添加
carray-fdt_serial_drivers-$(CONFIG_FDT_SERIAL_CADENCE) += fdt_serial_cadence
libsbiutils-objs-$(CONFIG_FDT_SERIAL_CADENCE) += serial/fdt_serial_cadence.o
......
如下再根据配置添加串口底层实现文件
libsbiutils-objs-$(CONFIG_SERIAL_CADENCE) += serial/cadence-uart.o
......
上面提到的build/platform/generic/lib/utils/serial/fdt_serial_drivers.carray.c
在Makefile中如下实现
$(platform_build_dir)/%.carray.c: $(platform_src_dir)/%.carray
$(call compile_carray,$@,$<)
实现如下
compile_carray = $(CMD_PREFIX)mkdir -p `dirname $(1)`; \
echo " CARRAY $(subst $(build_dir)/,,$(1))"; \
$(eval CARRAY_VAR_LIST := $(carray-$(subst .carray.c,,$(shell basename $(1)))-y)) \
$(src_dir)/scripts/carray.sh -i $(2) -l "$(CARRAY_VAR_LIST)" > $(1)
即调用的脚本
scripts/carray.sh
根据
lib/utils/serial/fdt_serial_drivers.carray
HEADER: sbi_utils/serial/fdt_serial.h //头文件
TYPE: struct fdt_serial //数组类型
NAME: fdt_serial_drivers //指定数组结构名字,可以通过该全局变量索引指定的驱动
生成
build/platform/generic/lib/utils/serial/fdt_serial_drivers.carray.c
实际就是生成了全局数组 fdt_serial_drivers ,这个数组的成员即各个串口驱动的实现
// Generated with carray.sh from fdt_serial_drivers.carrayextern struct fdt_serial fdt_serial_cadence;extern struct fdt_serial fdt_serial_gaisler;extern struct fdt_serial fdt_serial_htif;extern struct fdt_serial fdt_serial_renesas_scif;extern struct fdt_serial fdt_serial_shakti;extern struct fdt_serial fdt_serial_sifive;extern struct fdt_serial fdt_serial_litex;extern struct fdt_serial fdt_serial_uart8250;extern struct fdt_serial fdt_serial_xlnx_uartlite;struct fdt_serial *fdt_serial_drivers[] = {&fdt_serial_cadence,&fdt_serial_gaisler,&fdt_serial_htif,&fdt_serial_renesas_scif,&fdt_serial_shakti,&fdt_serial_sifive,&fdt_serial_litex,&fdt_serial_uart8250,&fdt_serial_xlnx_uartlite,};unsigned long fdt_serial_drivers_size = sizeof(fdt_serial_drivers) / sizeof(struct fdt_serial *);
串口驱动上面可以选择同时支持多个,根据设备树来匹配具体是哪一个
sudo apt-get install device-tree-compiler
获取c-sky/buildroot的设备树。
dump设备树,注意逗号
./host/csky-qemu/bin/qemu-system-riscv64 -M virt,dumpdtb=dump.dtb
反编译
dtc -o dump.dts -O dts -I dtb dump.dtb
将dtb文件放置于platform/generic目录下
make PLATFORM=generic FW_TEXT_START=0x80000000 FW_FDT_PATH=/home/qinyunti/opensbi/platform/generic/dump.dtb
Dts串口相关内容如下,这是qemu的串口,根据实际平台修改。
chosen和uart两个节点必须要有。
/dts-v1/;/ {#address-cells = <0x02>;#size-cells = <0x02>;compatible = "riscv-virtio";model = "riscv-virtio,qemu";chosen {bootargs = [00];stdout-path = "/uart@10000000";};uart@10000000 {interrupts = <0x0a>;interrupt-parent = <0x03>;clock-frequency = <1000000>;current-speed = <115200>;reg-shift = <0>;reg-io-width = <1>;reg-offset = <0>;reg = <0x00 0x10000000 0x00 0x100>;compatible = "xxx,xxx-uart";};......
lib/utils/serial/fdt_serial.c中
fdt_serial_init中
会匹配设备树的串口节点的compatible和驱动中的serial_xxx_match中的compatible,
一致则调用该驱动的实现。
以下以添加自定义驱动为例分享整个过程
lib/utils/serial/下添加fdt_serial_xxx.c和xxx_uart.c
前者实现
struct fdt_serial fdt_serial_xxx = {
.match_table = serial_xxx_match,
.init = serial_xxx_init
};
后者实现
int xxx_uart_init(unsigned long base, u32 in_freq, u32 baudrate)
并调用sbi_console_set_device注册标准输入输出接口。
驱动代码以qemu的为例,根据实际修改
lib/utils/serial/xxx-uart.c内容如下
/** SPDX-License-Identifier: BSD-2-Clause** Copyright (c) 2019 .** Authors:**//* clang-format off *//* clang-format on */static volatile char *xxx_uart_base;static u32 xxx_uart_in_freq;static u32 xxx_uart_baudrate;static u32 xxx_uart_reg_width;static u32 xxx_uart_reg_shift;static u32 get_reg(u32 num){u32 offset = num << xxx_uart_reg_shift;if (xxx_uart_reg_width == 1)return readb(xxx_uart_base + offset);else if (xxx_uart_reg_width == 2)return readw(xxx_uart_base + offset);elsereturn readl(xxx_uart_base + offset);}static void set_reg(u32 num, u32 val){u32 offset = num << xxx_uart_reg_shift;if (xxx_uart_reg_width == 1)writeb(val, xxx_uart_base + offset);else if (xxx_uart_reg_width == 2)writew(val, xxx_uart_base + offset);elsewritel(val, xxx_uart_base + offset);}static void xxx_uart_putc(char ch){while ((get_reg(UART_LSR_OFFSET) & UART_LSR_THRE) == 0);set_reg(UART_THR_OFFSET, ch);}static int xxx_uart_getc(void){if (get_reg(UART_LSR_OFFSET) & UART_LSR_DR)return get_reg(UART_RBR_OFFSET);return -1;}static struct sbi_console_device xxx_uart_console = {.name = "xxx_uart",.console_putc = xxx_uart_putc,.console_getc = xxx_uart_getc};int xxx_uart_init(unsigned long base, u32 in_freq, u32 baudrate, u32 reg_shift,u32 reg_width, u32 reg_offset){u16 bdiv = 0;volatile uint32_t* tmp = (uint32_t*)0x10000004;*tmp = 0x11223344;if(*tmp != 0x11223344){while(1);}xxx_uart_base = (volatile char *)base + reg_offset;xxx_uart_reg_shift = reg_shift;xxx_uart_reg_width = reg_width;xxx_uart_in_freq = in_freq;xxx_uart_baudrate = baudrate;if (xxx_uart_baudrate) {bdiv = (xxx_uart_in_freq + 8 * xxx_uart_baudrate) /(16 * xxx_uart_baudrate);}/* Disable all interrupts */set_reg(UART_IER_OFFSET, 0x00);/* Enable DLAB */set_reg(UART_LCR_OFFSET, 0x80);if (bdiv) {/* Set divisor low byte */set_reg(UART_DLL_OFFSET, bdiv & 0xff);/* Set divisor high byte */set_reg(UART_DLM_OFFSET, (bdiv >> 8) & 0xff);}/* 8 bits, no parity, one stop bit */set_reg(UART_LCR_OFFSET, 0x03);/* Enable FIFO */set_reg(UART_FCR_OFFSET, 0x01);/* No modem control DTR RTS */set_reg(UART_MCR_OFFSET, 0x00);/* Clear line status */get_reg(UART_LSR_OFFSET);/* Read receive buffer */get_reg(UART_RBR_OFFSET);/* Set scratchpad */set_reg(UART_SCR_OFFSET, 0x00);sbi_console_set_device(&xxx_uart_console);return sbi_domain_root_add_memrange(base, PAGE_SIZE, PAGE_SIZE,(SBI_DOMAIN_MEMREGION_MMIO |SBI_DOMAIN_MEMREGION_SHARED_SURW_MRW));}
lib/utils/serial/fdt_serial_xxx.c内容如下
/** SPDX-License-Identifier: BSD-2-Clause** Copyright (c) .** Authors:**/static int serial_xxx_init(const void *fdt, int nodeoff,const struct fdt_match *match){int rc;struct platform_uart_data uart = { 0 };rc = fdt_parse_uart_node(fdt, nodeoff, &uart);if (rc)return rc;return xxx_uart_init(uart.addr, uart.freq, uart.baud,uart.reg_shift, uart.reg_io_width,uart.reg_offset);}static const struct fdt_match serial_xxx_match[] = {{ .compatible = "xxx,xxx-uart" },{ },};struct fdt_serial fdt_serial_xxx = {.match_table = serial_xxx_match,.init = serial_xxx_init,};
添加include/sbi_utils/serial/xxx-uart.h文件
内容如下
/** SPDX-License-Identifier: BSD-2-Clause** Copyright (c) 2022 Technology Co., Ltd.** Author:*/int xxx_uart_init(unsigned long base, u32 in_freq, u32 baudrate);
lib/utils/serial/Kconfig
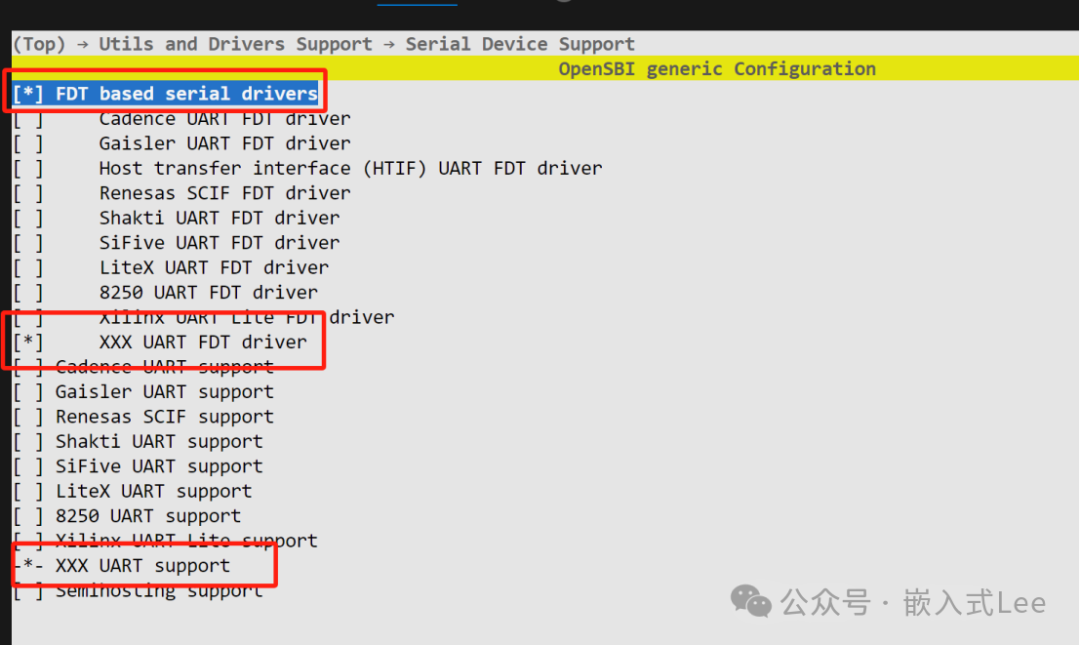
config FDT_SERIAL_XILINX_UARTLITE后添加
config FDT_SERIAL_XXX
bool "XXX UART FDT driver"
select SERIAL_XXX
default n
config SERIAL_XILINX_UARTLITE后添加
config SERIAL_XXX
bool "XXX UART support"
default n
lib/utils/serial/objects.mk
添加
carray-fdt_serial_drivers-$(CONFIG_FDT_SERIAL_XXX) += fdt_serial_xxx
libsbiutils-objs-$(CONFIG_FDT_SERIAL_XXX) += serial/fdt_serial_xxx.o
libsbiutils-objs-$(CONFIG_SERIAL_XXX) += serial/xxx-uart.o
uart@10000000 {
的compatible改为和
lib/utils/serial/fdt_serial_xxx.c中的serial_xxx_match一致
static const struct fdt_match serial_xxx_match[] = {
{ .compatible = "xxx,xxx-uart" },
{ },
};
chosen {bootargs = [00];stdout-path = "/uart@10000000";};uart@10000000 {interrupts = <0x0a>;interrupt-parent = <0x03>;clock-frequency = <1000000>;current-speed = <115200>;reg-shift = <0>;reg-io-width = <32>;reg-offset = <0>;reg = <0x00 0x10000000 0x00 0x100>;compatible = "xxx,xxx-uart";};
编译设备树
dtc -I dts -O dtb -o xxx-uart.dtb platform/generic/qemu_dump.dts
export CROSS_COMPILE=~/buildroot/thead_920v2_enhanced_5.10_glibc_br_defconfig/host/bin/riscv64-unknown-linux-gnu-
export PLATFORM_RISCV_XLEN=64
make PLATFORM=generic menuconfig
Utils and Drivers Support --->
Serial Device Support--->
make PLATFORM=generic FW_TEXT_START=0x80000000 FW_FDT_PATH=/home/qinyunti/opensbi/platform/generic/xxx-uart.dtb
运行即可看到qemu的打印。
前面看到了打印,继续来看下,打印是如何实现的
串口初始化时注册底层读写接口
sbi_console_set_device(&xxx_uart_console);
static struct sbi_console_device xxx_uart_console = {
.name = "xxx_uart",
.console_putc = xxx_uart_putc,
.console_getc = xxx_uart_getc
};
还可以实现console_puts打印字符串可以提高效率。
lib/sbi/sbi_console.c中设置全局变量
console_dev = dev;
sbi_printf->print->printc->sbi_putc->nputs_all->nputs->console_dev->console_putc或者console_dev->console_puts
sbi_ecall_dbcn_handler->sbi_ngets/sbi_gets->sbi_getc->console_dev->console_getc
这里来看下相关信息是在哪打印的
以下BUILD_INFO=y可以打印更多信息
make PLATFORM=generic FW_TEXT_START=0x80000000 FW_FDT_PATH=/home/qinyunti/opensbi/platform/generic/xxx-uart.dtb BUILD_INFO=y
Makefile中
# Build Info:# OPENSBI_BUILD_TIME_STAMP -- the compilation time stamp# OPENSBI_BUILD_COMPILER_VERSION -- the compiler version infoBUILD_INFO ?= nifeq ($(BUILD_INFO),y)OPENSBI_BUILD_DATE_FMT = +%Y-%m-%d %H:%M:%S %zifdef SOURCE_DATE_EPOCHOPENSBI_BUILD_TIME_STAMP ?= $(shell date -u -d "@$(SOURCE_DATE_EPOCH)" \"$(OPENSBI_BUILD_DATE_FMT)" 2>/dev/null || \date -u -r "$(SOURCE_DATE_EPOCH)" \"$(OPENSBI_BUILD_DATE_FMT)" 2>/dev/null || \date -u "$(OPENSBI_BUILD_DATE_FMT)")elseOPENSBI_BUILD_TIME_STAMP ?= $(shell date "$(OPENSBI_BUILD_DATE_FMT)")endifOPENSBI_BUILD_COMPILER_VERSION=$(shell $(CC) -v 2>&1 | grep ' version ' | \sed 's/[[:space:]]*$$//')endififeq ($(BUILD_INFO),y)GENFLAGS += -DOPENSBI_BUILD_TIME_STAMP="\"$(OPENSBI_BUILD_TIME_STAMP)\""GENFLAGS += -DOPENSBI_BUILD_COMPILER_VERSION="\"$(OPENSBI_BUILD_COMPILER_VERSION)\""endififeq ($(BUILD_INFO),y)$(build_dir)/lib/sbi/sbi_init.o: $(libsbi_dir)/sbi_init.c FORCE$(call compile_cc,$@,$<)endif
lib/sbi/sbi_init.c
中
sbi_boot_print_banner打印LOGO和编译版本信息
OPENSBI_BUILD_TIME_STAMP和OPENSBI_BUILD_COMPILER_VERSION就是BUILD_INFO=y时自动生成。
static void sbi_boot_print_banner(struct sbi_scratch *scratch){if (scratch->options & SBI_SCRATCH_NO_BOOT_PRINTS)return;sbi_printf("\nOpenSBI %s\n", OPENSBI_VERSION_GIT);sbi_printf("\nOpenSBI v%d.%d\n", OPENSBI_VERSION_MAJOR,OPENSBI_VERSION_MINOR);sbi_printf("Build time: %s\n", OPENSBI_BUILD_TIME_STAMP);sbi_printf("Build compiler: %s\n", OPENSBI_BUILD_COMPILER_VERSION);sbi_printf(BANNER);}
打印如下
串口驱动的实现实际是通过脚本,将各个串口驱动c文件中的struct fdt_serial全局变量,自动组合生成一个全局数组fdt_serial_drivers,该数组的成员就是各个串口驱动的实现struct fdt_serial。通过全局变量fdt_serial_drivers即可索引各个驱动,通过设备树节点的compatible来匹配驱动。
