西湖大学工学院姜汉卿(Hanqing Jiang)团队,在《Nature Communications》期刊上发布了一篇题为“Energy-efficient dynamic 3D metasurfaces via spatiotemporal jamming interleaved assemblies for tactile interfaces”的论文,本项研究工作的第一作者为西湖大学助理研究员安思奇(Siqi An)、博士后李晓文(Xiaowen Li)、助理研究员郭增荣(Zengrong Guo),合作作者为科研助理黄毅(Yi Huang)和博士生张焱林(Yanlin Zhang)。论文内容如下:
一、摘要
二、背景介绍
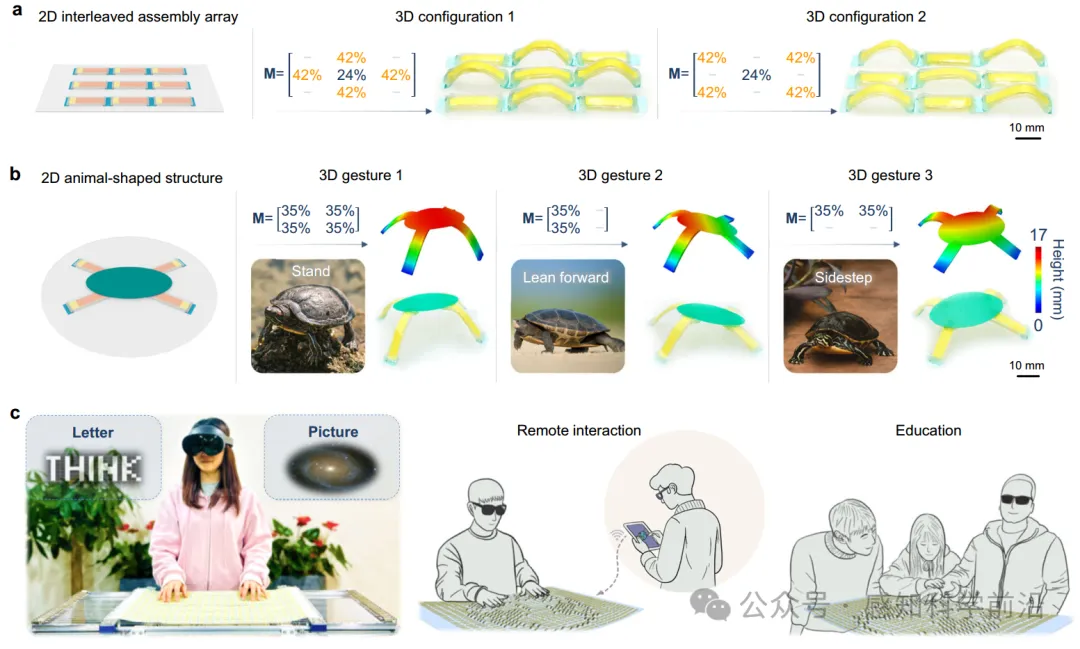
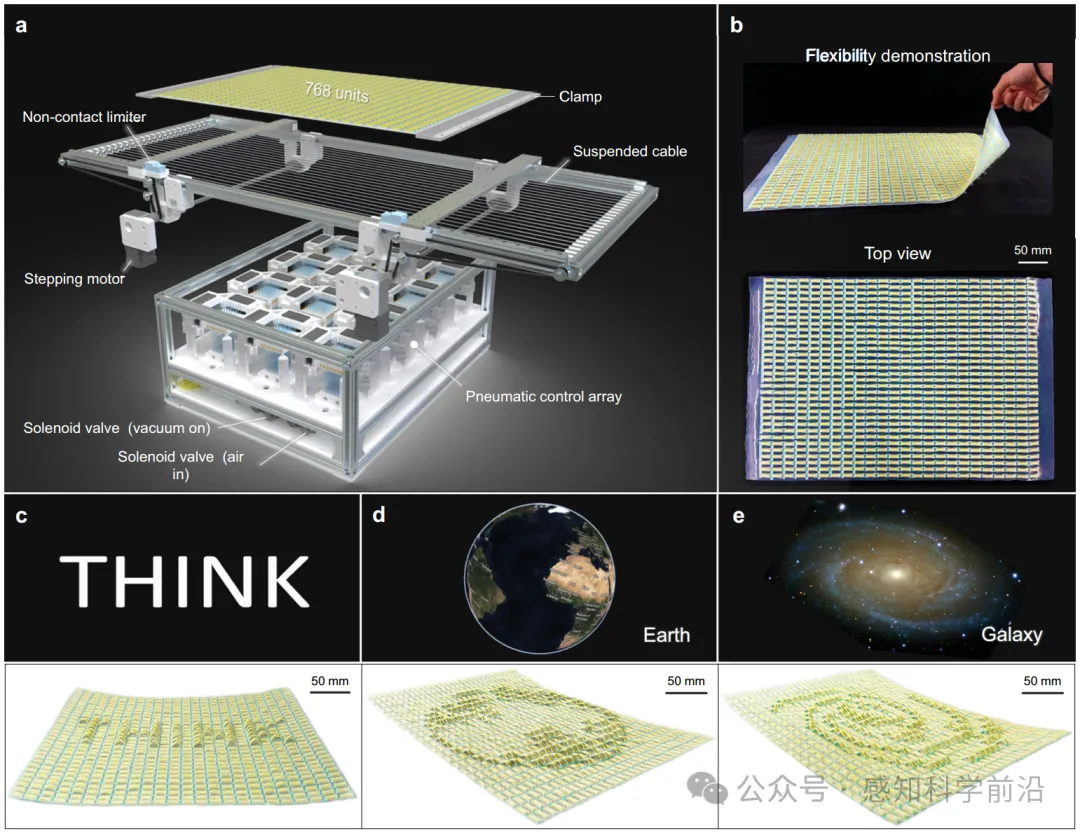
在本文中,作者提出了一种能量高效、可动态刷新三维超构表面的方案,该超构表面由在柔性基底上通过时空干扰交错组装而成的具有可调刚度的单元构成。在预拉伸的柔性基底上,交错组装可以在预应变松弛的不同时间点,通过真空单独调控并进行空间干扰。在不同空间位置对最初平坦的交错组件进行阻塞,形成具有不同刚度的二维交错组件阵列,这些组件在释放预拉伸的柔性基材后会向三维结构弯曲,展现出不同的轮廓。一旦被阻塞,形成的三维形状无需持续输入能量即可维持,并表现出良好的承载能力。这些被阻塞的单元也可以随后解除阻塞,恢复为二维形状。因此,该方法能够实现动态可刷新性,并以能量高效的方式展示三维形状。形成的三维形状在理论上可以根据交错组件的几何形状和残余预应变进行预测;因此,可以应用逆向设计以实现所需的三维形状。得益于动态可刷新性和承载能力,作者利用32 × 24的交错组件阵列展示了复杂的三维结构,这些结构可以作为视觉障碍人士的触觉显示器,或在虚拟现实/增强现实应用中用作触觉超构表面。这种方法不仅展示了三维形状变形技术的显著进展,还为在众多应用中革命性地改变用户界面和感官体验带来了希望。
三、内容详解
欲了解详细制备过程,请阅读原文。
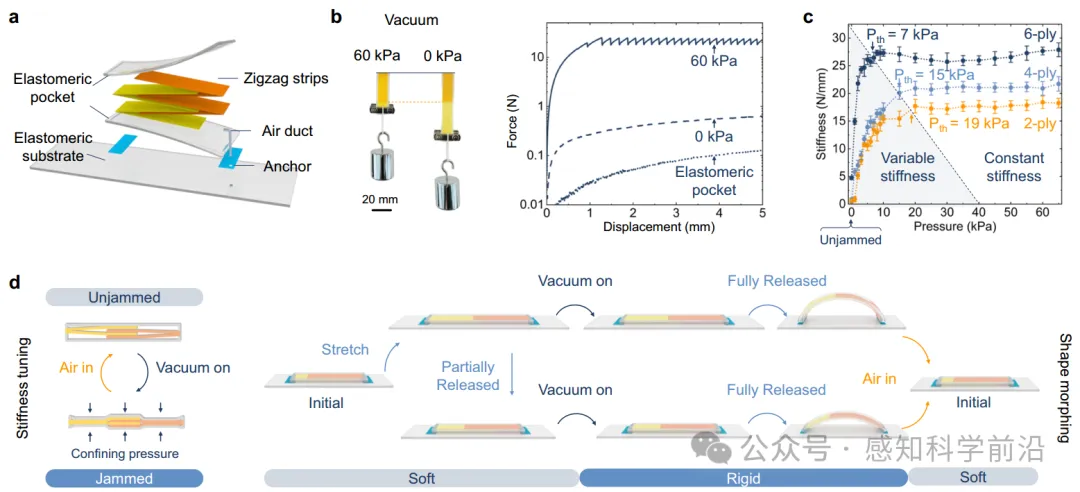
与传统方法利用具有恒定拉伸刚度的薄条相比,当前系统引入了一个额外的设计变量:阻塞诱导的可调拉伸刚度。该变量显著地改变了系统的屈曲行为,屈曲高度因交错组件被阻塞的具体时刻而异,形成在释放应变的软基底上的刚性条带(见图1d及视频1)。在存在这些交错组件阵列的情境中,每个独立组件可以在不同的时间瞬间被卡住,从而实现一种时空可控的屈曲策略,用于制造三维结构。该策略提供了两个显著的优势:(1) 卡住过程是可逆的。当处于开启状态的屈曲条带被解卡(通过移除真空以恢复到关闭状态并允许空气进入)时,它会恢复到其原始平坦形态。(2) 一旦组件被卡住,就不需要持续输入能量,使得该方法在改变拉伸刚度时具有能效优势。需要注意的是,卡住需要由消耗能量的真空泵触发,但一旦卡住完成,真空泵可以关闭,并且由于气密条件,卡住状态可以保持。
视频3
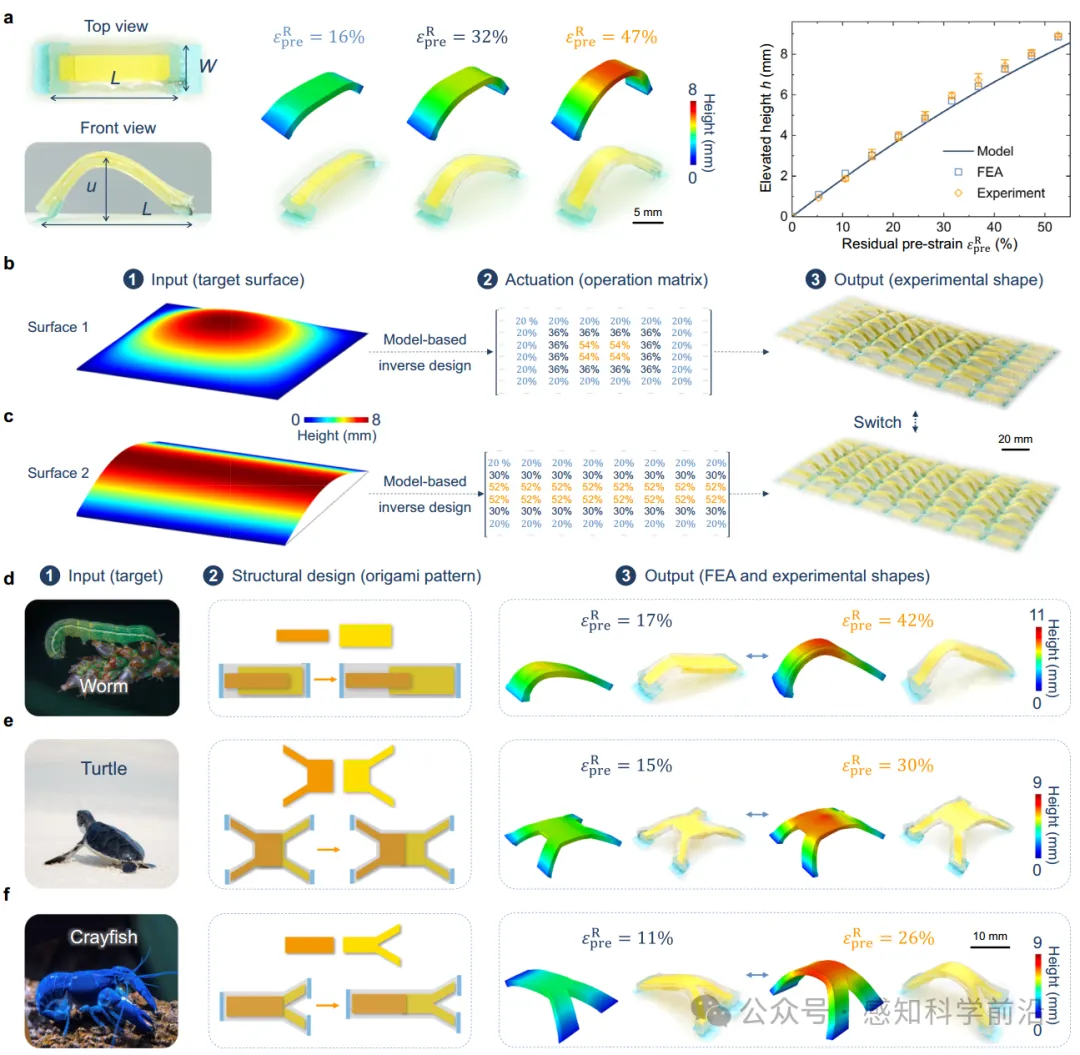
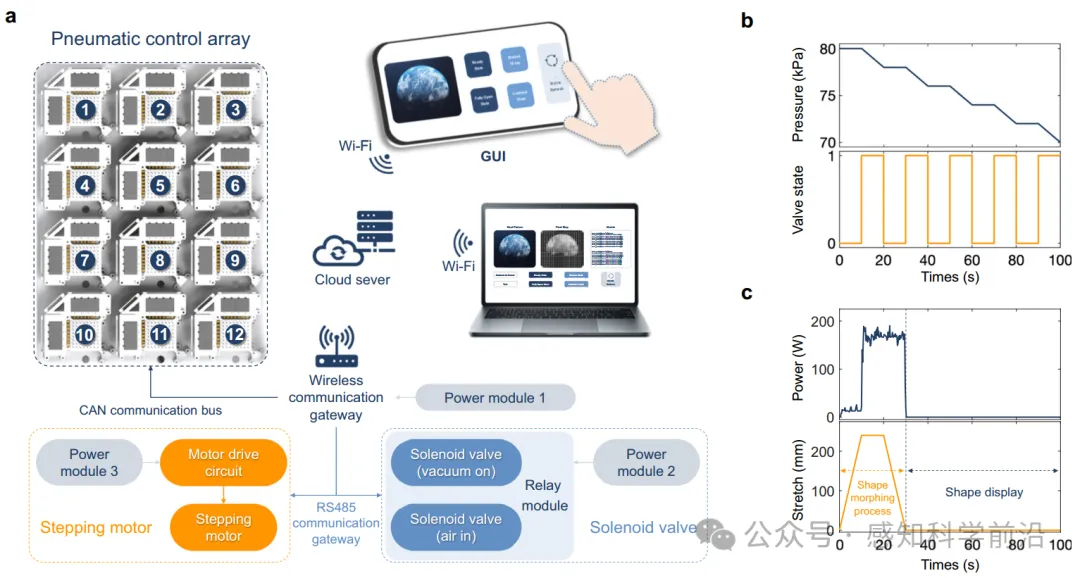
图5 大规模像素化交错组件阵列的控制策略。a 32 × 24 交错组件阵列的电路图和连接机制及其与触摸屏设备或笔记本电脑的无线接口。b 给定控制命令(底部面板)下气动控制单元(顶部面板)的压力响应。气动控制单元有两种状态,即管道关闭时的“0”状态(或 OFF 状态)和管道打开时的“1”状态(或 ON 状态),分别导致压力恒定或降低。气动控制单元状态的切换可以精确快速地改变压力响应。c 驱动系统的功耗。在形状变形过程中(例如,显示单词“THINK”),步进电机和转向发动机的运行会导致瞬时能量消耗。而在长时间的形状显示过程中,没有能量消耗。
视频5
作者进行了一项涉及 14 名视障人士的用户研究,以评估作者的设备在帮助识别图形信息方面的有效性,这对于提升视力障碍者的独立性和生活质量至关重要。该研究包括两个感知实验,以评估识别准确性和时间效率,随后进行了问卷调查,以评估主观体验。
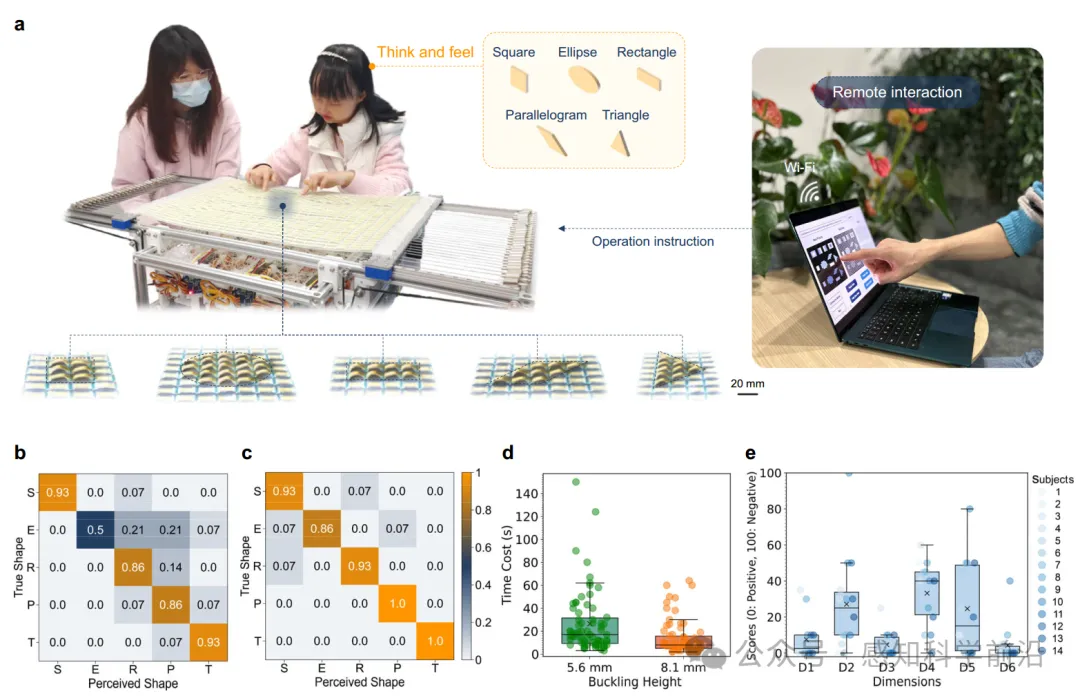
图7 关于动态三维超构表面设备辅助视障人士的用户研究。a 照片展示了一名视障参与者使用无线控制的三维超构表面设备进行形状识别任务。b、c 分别为实验1和实验2的识别准确率混淆矩阵。弯曲高度从b中的5.6毫米增加至c中的8.1毫米。字母代表不同的形状:“S”代表正方形,“E”代表椭圆,“R”代表矩形,“P”代表平行四边形,“T”代表三角形。这些结果突显了弯曲高度对识别准确率的影响。d 时间成本的统计结果表明,随着单位高度的增加,识别效率显著提高(n = 14,8名男性,6名女性,年龄26-56岁;p < 0.001,配对样本Wilcoxon检验;须,5-95百分位;框,四分位数;水平线,中位数;交叉标记,均值;圆形散点,表示每位参与者感知每种形状的时间成本)。e NASA-TLX问卷的统计结果表明三维超构表面设备的工作负荷适中。(D1:身体需求,D2:心理需求,D3:时间需求,D4:表现,D5:努力,D6:挫败感)。
四、全文总结
五、文献信息