点击上方蓝字谈思实验室
获取更多汽车网络安全资讯
DCU:Domain Controller Unit,域控制器
MCU:Micro Controller Unit,微控制单元
MPU:Micro Processor Unit,微处理单元
近年来,SDV(Software Define Vehicles,即软件定义汽车) 概念逐步被整车厂认知,根源在于 “汽车如何体现差异化”问题的变迁,随着电动化带来的汽车电子构架革新,汽车硬件体系将逐渐趋于一致,如何构建通用化硬件,成为实现软件软件定义汽车的前提基础。只有把硬件通用化,差异化减少,才能减少对软件适配的成本,做到真正的软件定义汽车。
01
分布式电子电气架构
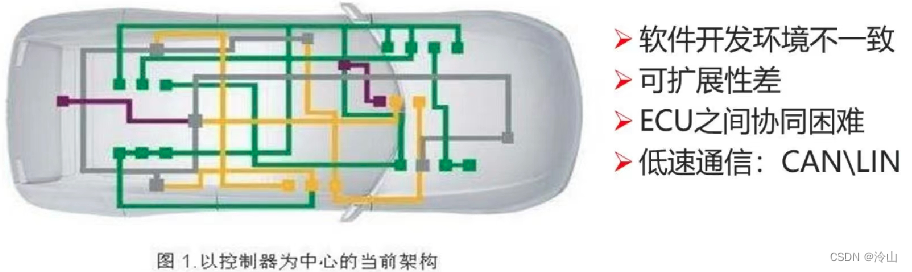
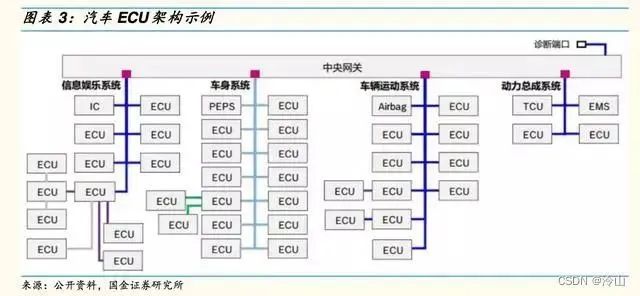
过去十多年的汽车智能化和信息化发展产生了一个显著结果就是 ECU 芯片使用量越来越多。从传统的引擎控制系统、安全气囊、防抱死系统、电动助力转向、车身电子稳定系统;再到智能仪表、娱乐影音系统、辅助驾驶系统;还有电动汽车上的电驱控制、电池管理系统、车载充电系统,以及蓬勃发展的车载网关、T-BOX和自动驾驶系统等等。
传统的汽车电子电气架构都是分布式的,汽车里的各个ECU都是通过CAN和LIN总线连接在一起,现代汽车里的ECU总数已经迅速增加到了几十个甚至上百个之多,整个系统复杂度越来越大,几近上限。在今天软件定义汽车和汽车智能化、网联化的发展趋势下,这种基于ECU的分布式EEA也日益暴露诸多问题和挑战。
02
域集中电子电气架构架构
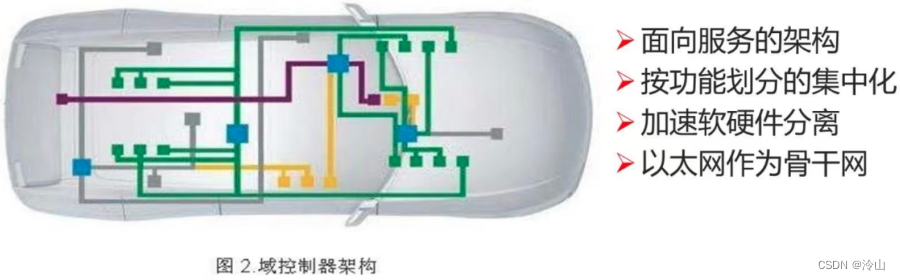
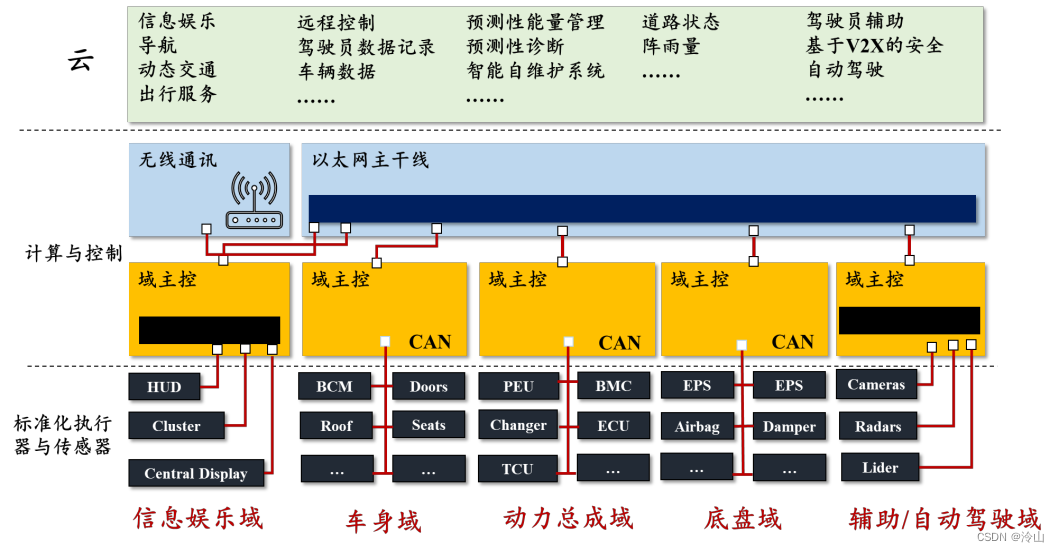
为了解决分布式EEA的这些问题,人们开始逐渐把很多功能相似、分离的ECU功能集成整合到一个比ECU性能更强的处理器硬件平台上,这就是汽车 域控制器。域控制器的出现是汽车EE架构从ECU分布式EE架构演进到域集中式EE架构的一个重要标志。
域控制器 是汽车每一个功能域的核心,它主要由域主控处理器、操作系统和应用软件及算法三部分组成。平台化、高集成度、高性能和良好的兼容性是域控制器的主要核心设计思想。依托高性能的域主控处理器、丰富的硬件接口资源以及强大的软件功能特性,域控制器能将原本需要很多颗ECU实现的核心功能集成到一起来,极大提高系统功能集成度,再加上数据交互的标准化接口,因此能极大降低这部分的开发和制造成本。
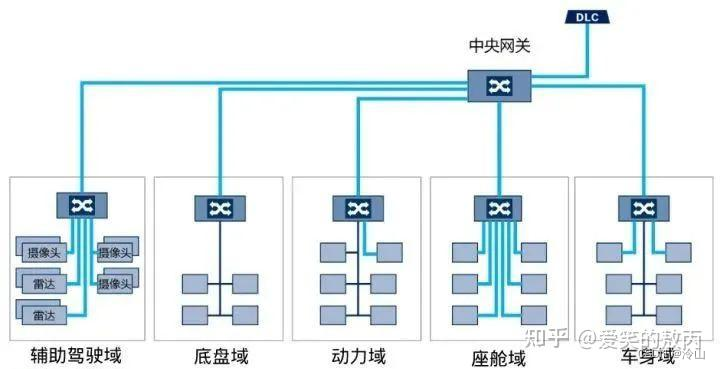
对于功能域的具体划分,各汽车主机厂家会根据自身的设计理念差异而划分成几个不同的域。比如博世划分为5个域:动力域(Power Train,安全)、底盘域(Chassis,车辆运动)、车身域(Body,车身电子)、座舱域/智能信息域(Cockpit/Infotainment,娱乐信息)、自动驾驶域(ADAS,辅助驾驶)。
各个域内部的系统互联使用现如今常用的 CAN 和 FlexRay 通信总线。而不同域之间的通讯,则由更高传输性能的以太网作为主干网络承担信息交换任务。在每个功能域中,域控制器处于绝对位置,需要强大的处理功率和超高的实时性能以及大量的通信外设来支持对应域的功能实现。域控制器为构建新一代的通用、高算力、高带宽、高安全、可重构的汽车电子电气架构,智能电动汽车的技术和产业发展提供坚实基础。
2.1 通用硬件定义
域控制器的通用型要求:
相关功能集中,集成 MPU/MCU,满足域内功能运算能力要求及功能安全要求;
集成标准化软件接口,如 AUTOSAR;
带通讯接口,可与整车主网络直连,同时与域内执行器或传感器通过二级通讯总线进行交互,总线类型:车载以太网(TSN)、CAN、LIN、FlexRay…
目前,主流车企、零部件企业产品均按照动力、底盘、车身、座舱、自动驾驶五大域控制器推进研发和商业化落地。
03
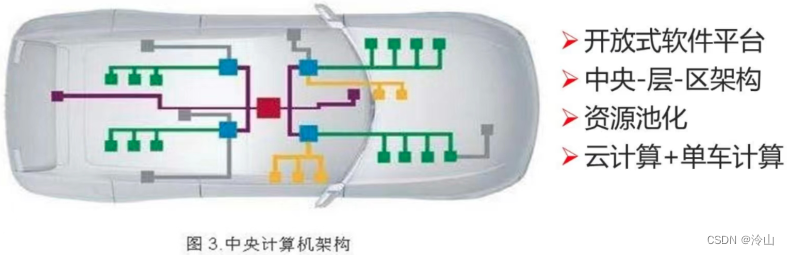
车辆集中电子电气架构
04
ADAS/AD系统方案演变进程梳理
4.1 L0-L2级别的ADAS方案
早期大多数L0-L2级别的ADAS系统都是基于分布式控制器架构,整个ADAS系统由4-5个ADAS子系统组成,每个子系统通常是个一体机整体方案(可以被看作是一个smart sensor),子系统独占所配置的传感器,通常相互之间是独立的。
以智能前视摄像头模块(Intelligent Front Camera Module,FCM) 为例,整个子系统ECU主板上包含2颗芯片:一颗是安全核(Safety Core);另一个颗是性能核(Performance Core)。安全核一般由英飞凌TC297/397之类的MCU充当,承载控制任务,因此需要较高的功能安全等级需求;性能核通常是具有更高性能算力的多核异构MPU,会承载大量的计算任务。
下面是一个对L0-L2级别方案的总结:
L0级别方案:实现各种ADAS报警功能,比如:FCW、LDW、BSW、LCA等。分布式架构,通常由FCM、FCR、SRRs、AVS、APA等几大硬件模块组成。
L1级别方案:完成各种ADAS单纵向核单横向控制功能,比如:ACC、AEB、LKA等。也是分布式架构,硬件模块组成与L0级别方案大致相同。
L2级别方案:完成ADAS纵向+横向组合控制功能。比如:基于FCM+FCR融合系统,融合前向视觉感知和前雷达目标感知信息,实现TJA/ICA等功能;或者基于AVS+APA的融合系统,实现自动泊车功能。
4.2 L2+以上级别的ADAS方案
分布式架构的ADAS系统存在两个致命缺点:
各个子系统互相独立,无法做多传感器之间的深度融合。
各子系统独占所配置的传感器,因此无法实现跨多个不同子系统传感器的复杂功能。
当整车EE架构演进到域集中式EEA之后,ADAS域控制器中配置了集成度更高、算力性能更高的计算处理器平台,进而可以支撑更复杂的传感器数据融合算法,以实现更高级级别的ADAS功能,比如:HWP、AVP等。
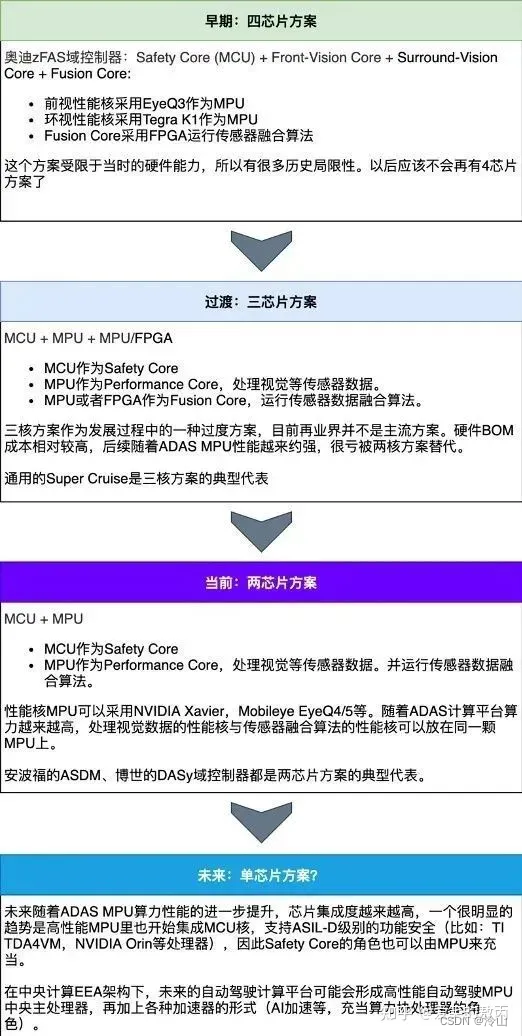
集中式ADAS域控制器方案从最早的四芯片方案,过渡到三芯片方案,再到当前业界主流的两芯片方案,如下图所示:
05
MCU和MPU区别
MPU 的全称叫 Micro Processor Unit,MCU 的全称是 Mirco Controller Unit。首先这两个词都有一个Micro开头,其实这就表明了这是计算/控制单元小型化后出现的技术。事实上,这是由于集成电路进步带来的计算机系统集成程度提高的结果。使得原来有多片分立的元件组成的计算机系统向高度集成化发展,多个芯片/元件的功能在向一颗芯片集中。这是一个大的技术演进的背景。核心区别其实就是 Control 和 Process。
但在技术演进过程中,出现了两种不同的需求。这两种需求就是“以软制硬”和“以硬助软”两种模式。
所谓以软制硬,就是通过运行一段软件/程序来控制硬件,也就是所谓的程控。在这种使用模式中,计算机系统不承担主要的工作负载,而主要是起辅助/协调/控制作用。
因此这种情况下集成的化的计算机系统就不太需要强大的计算/处理能力。所以对应的形态应该是运行频率低、运算能力一般,但是需要集成化程度高(使用方便)、价格低廉(辅助系统不应增加太多成本)等因素。
由于主要完成“控制”相关的任务,所以被称为Controller。也就是根据外界的信号(刺激),产生一些响应,做一点简单的人机界面。对于这种需求,通过不需要芯片主频太高。早期8051系列主频不过10几MHz,还是12个周期执行一条指令。经过多年的“魔改”也最终达到了100MHz。其次就是处理能力不用太强,8位的MCU长期是微控制器的主流。后来16位的MCU逐步开始占领市场。而随着ARM的32位MCU的出现,采用ARM的M系列的MCU也开始逐步扩大市场。以ST、NXP公司的产品为主要代表。但是这些ARM系列MCU的主频一般也是在几十MHz到100多MHz的量级。其次由于执行的“控制相关”任务,通常不需要支持复杂的图形界面和处理能力。在MCU上完成的任务大多数是一些简单的刺激-响应式的任务,而且任务类型单一,任务执行过程简单。在这种情况下一般不需要MCU去执行功能复杂、运算量大的程序,而通常不需要运行大型操作系统来支持复杂的多任务管理。这就造成了MCU一般对于存储器的容量要求比较低。
而Processor,顾名思义是处理器。处理器就是能够执行“处理”功能的器件。其实具备Processor这个单词的器件不少。比如CPU就被称为“中央处理器”,那既然有“中央”就应该有“外围”。GPU在经典的桌面计算机中就是一个典型的“外围”处理器,主要负责图形图像处理,由于图形图像显示。当然,今天由于AI的崛起,GPU变身成为了人工智能的训练神器。带“P”的还有DSP,数字信号处理器,一种专门为了数字信号处理而生的“领域专用处理器”。所以这些带P的处理器,都是要具备“处理”能力的。“处理”什么?自然是处理数据/信息了。也就是说处理器本身都需要较为强大的数据处理/计算能力。以GPU为例,正是由于它强大的并行浮点运算能力才能支持高速的图像处理,使音视频播放、多媒体技术成为可能。同样由于这样的处理能力使之在AI时代来临之时发挥巨大作用。
以上对于处理器说了这么多,核心意思就是一个。处理器一定要处理/运算能力强,能够执行比较复杂的任务。而微处理器,其实就是微型化/集成化了的处理器。准确的说是微型化/集成化的中央处理器(CPU)。这就是把传统的CPU之外集成了原属于“芯片组”的各类接口和部分“外设”而形成的。MPU从一开始就定位了具有相当的处理和运算能力,一帮需要运行较大型的操作系统来实现复杂的任务处理。因此这就决定了MPU应该具备比较高的主频,和较为强大的运算能力。MPU很早就演进到了32位处理器,现在更是开始大力普及64位。现在MPU领导具有绝对影响力的Arm公司一开始就定位要做32位。同时MPU也一直追求实现较高的主频。早期经典的Arm 9系列MPU频率就在200MHz-400MHz。现在手机上使用的高端MPU更是到达了3GHz,和主流的桌面处理器是一个级别了。和通用的桌面处理器一样,MPU现在也普遍“多核化”。
为了支撑MPU强大的算力,使得“物尽其用”。必然要求在MPU上运行比较复杂的、运算量大的程序和任务,通常需要有大容量的存储器来配合支撑。而大容量的存储器难以被集成到以逻辑功能为主的MPU内部,因此MPU现在要运行起来通常需要“外挂”大容量的存储器。主要是大容量的DDR存储器和FLASH。在手机领域前者被称为“运存”而后者被称为“内存”。为了支撑运行复杂操作系统和大型程序,往往还需要MPU中集成高性能的存储控制器、存储管理单元(MMU) 等一整套复杂的存储机制和硬件。
所以从形态上看,MPU由于需要运行对处理能力要求复杂大程序,一般都需要外挂存储器才能运行起来。而MCU往往只是执行刺激-响应式的过程控制和辅助,功能比较单一,仅仅需要使用片上集成的小存储器即可。这是区别MPU和MCU的重要表象,但不是核心原因。
总结一下,MPU和MCU的区别本质上是因为应用定位不同,为了满足不同的应用场景而按不同方式优化出来的两类器件。MPU注重通过较为强大的运算/处理能力,执行复杂多样的大型程序,通常需要外挂大容量的存储器。而MCU通常运行较为单一的任务,执行对于硬件设备的管理/控制功能。通常不需要很强的运算/处理能力,因此也不需要有大容量的存储器来支撑运行大程序。通常以单片集成的方式在单个芯片内部集成小容量的存储器实现系统的“单片化”。
但需要指出的是,随着技术的不断演进。以上的产品形态也会发生一系列的变化和衍生。现在NXP已经开始推出主频在1GHz,带强大运算能力的MCU。而随着3D封装、Chiplet技术的进步,把大容量存储器以先进封装的方式实现“单片集成”也正在实现。所以这种技术名词最终还是应该从他们出现的原因去理解,而不应该简单的从一些形态、架构去解释。更不应该机械的搞一些没有什么意义的“定义”,还让学生在考试的时候去回答。
5.1 MCU和MPU的区别
MCU在一块芯片中集成了整个计算机系统,可以直接加简单的外围器件(电阻,电容)就可以运行代码了。它本质上仍是一个完整的单片机,有处理器,有各种接口,所有的开发都是基于已经存在的系统架构,应用者要做的就是开发软件程序和加外部设备。
MCU在一块芯片中集成了整个计算机系统,可以直接加简单的外围器件(电阻,电容)就可以运行代码了。它本质上仍是一个完整的单片机,有处理器,有各种接口,所有的开发都是基于已经存在的系统架构,应用者要做的就是开发软件程序和加外部设备。
5.2 CPU与SoC的区别
SoC可以认为是将MCU集成化与MPU强处理力各优点二合一,其中MCU是CPU集成了各类外设,MPU是增强版的CPU。目前芯片的发展方向是从CPU到SoC,现在已经没有纯粹的CPU了,都是SoC。
5.3 举个例子
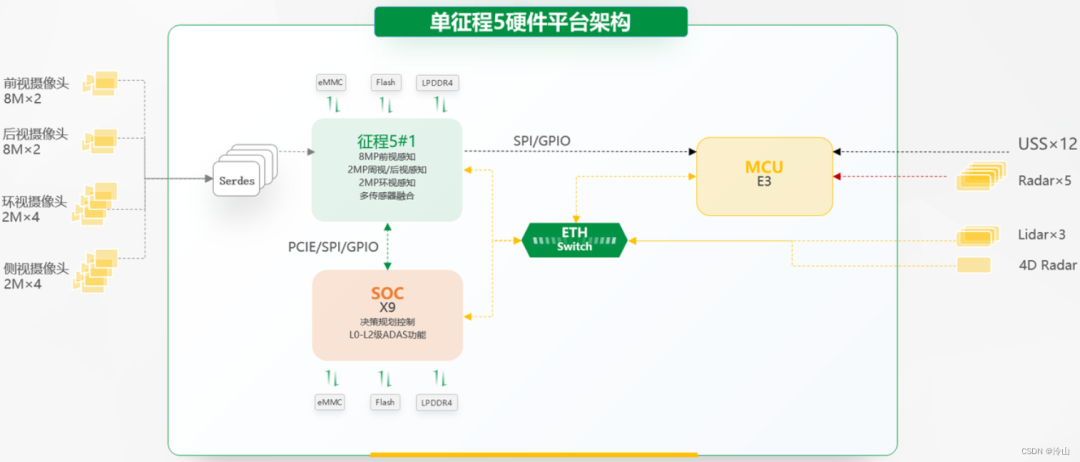
上图基于J5的自动驾驶域控制器可见,包含一个 MCU 和 J5+X9 俩 SoC,而 J5 包含了八核 Arm Cortex-A55
原文链接:
https://blog.csdn.net/qq_28087491/article/details/136151352
end
精品活动推荐




专业社群
部分入群专家来自:
新势力车企:
特斯拉、合众新能源-哪吒、理想、极氪、小米、宾理汽车、极越、零跑汽车、阿维塔汽车、智己汽车、小鹏、岚图汽车、蔚来汽车、吉祥汽车、赛力斯......
外资传统主流车企代表:
大众中国、大众酷翼、奥迪汽车、宝马、福特、戴姆勒-奔驰、通用、保时捷、沃尔沃、现代汽车、日产汽车、捷豹路虎、斯堪尼亚......
内资传统主流车企:
吉利汽车、上汽乘用车、长城汽车、上汽大众、长安汽车、北京汽车、东风汽车、广汽、比亚迪、一汽集团、一汽解放、东风商用、上汽商用......
全球领先一级供应商:
博世、大陆集团、联合汽车电子、安波福、采埃孚、科世达、舍弗勒、霍尼韦尔、大疆、日立、哈曼、华为、百度、联想、联发科、普瑞均胜、德赛西威、蜂巢转向、均联智行、武汉光庭、星纪魅族、中车集团、赢彻科技、潍柴集团、地平线、紫光同芯、字节跳动、......
二级供应商(500+以上):
Upstream、ETAS、Synopsys、NXP、TUV、上海软件中心、Deloitte、奇安信、为辰信安、云驰未来、信大捷安、信长城、泽鹿安全、纽创信安、复旦微电子、天融信、奇虎360、中汽中心、中国汽研、上海汽检、软安科技、浙江大学......
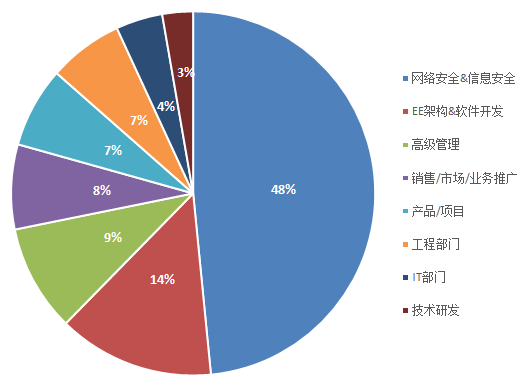
人员占比
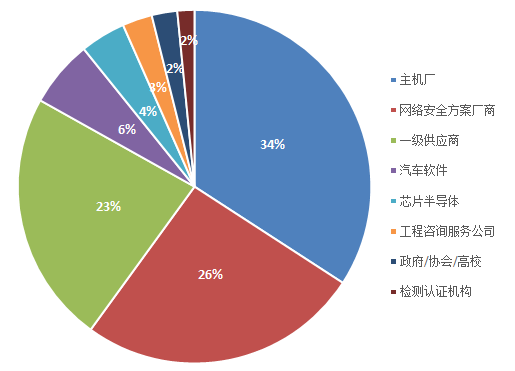
公司类型占比
更多文章
关于涉嫌仿冒AutoSec会议品牌的律师声明
一文带你了解智能汽车车载网络通信安全架构
网络安全:TARA方法、工具与案例
汽车数据安全合规重点分析
浅析汽车芯片信息安全之安全启动
域集中式架构的汽车车载通信安全方案探究
系统安全架构之车辆网络安全架构
车联网中的隐私保护问题
智能网联汽车网络安全技术研究
AUTOSAR 信息安全框架和关键技术分析
AUTOSAR 信息安全机制有哪些?
信息安全的底层机制
汽车网络安全
Autosar硬件安全模块HSM的使用
首发!小米雷军两会上就汽车数据安全问题建言:关于构建完善汽车数据安全管理体系的建议
