


----追光逐电 光赢未来----

视觉引导机器人定位抓取
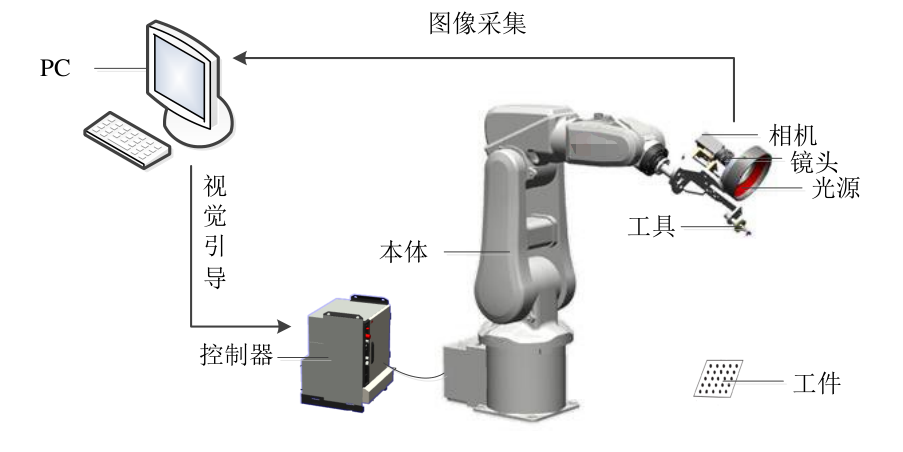
视觉引导机器人定位抓取系统是利用机器人视觉实现工件抓取点的视觉定位,再将定位数据发送工业机器人,实现由视觉信息引导机器人定位到工件的抓取点并完成抓取任务的系统。
系统框架主要由机器人视觉、 上位机、工业机器人和抓取目标组成。其中,机器人视觉包括相机、镜头、光源和视觉软件,主要负责图像采集和图像处理实现工件抓取点的视觉定位。
上位机负责通过以太网将工件抓取点的位置数据发送给工业机器人,最后, 机器人接收工件抓取点的定位数据,实现视觉信息通过控制器引导机器人本体运动到工件抓取点,并由机器人的工具完成抓取、 放置工件的任务。
视觉引导和定位
机器视觉采用先进的图像视觉检测技术,对高速运动的工业产品进行实时全面的视觉定位分析,此功能主要用于自动装配及生产。
机器人视觉引导—引导是使用机器视觉来报告组件的位置和方向。在自动化生产流水线中,通过机器视觉系统实时了解机器人在操作过程中、工作环境中的变化,并作出相应调整动作以保证任务的正确完成。
机器人视觉定位—要求机器视觉系统能够快速准确的找到被测零件并确认其位置,上下料使用机器视觉来定位,引导机械手臂准确抓取。
机器视觉引导就是使用机器视觉报告元件的位置和方向。
需要引导的原因可能有很多,我们主要从以下几点看看。
1、机器视觉系统可以定位元件的位置和方向,将元件与指定的公差进行比较,并确保元件处于正确的角度以验证元件是否正确组装。
2、引导可用于将元件在2D或3D空间内的位置和方向报告给机器人或机器控制器,让机器人能够定位元件或机器,以便对齐元件。
3、与在许多任务中进行手动定位相比,机器视觉引导可以实现更高的速度和精度。例如将元件放在托盘上或从托盘上取下元件;对传送带上的元件进行包装;对元件进行定位和对位,以便与其他零件组装在一起;将元件放在工作架上;或从包装盒中取出元件。
4、引导也可以与其他机器视觉工具配合使用,这是机器视觉的非常强大的功能。因为在生产过程中,元件可能会以未知的方向呈现给相机。通过定位元件并将其他机器视觉工具与该元件对齐,机器视觉可以实现自动工具定位。
机器视觉元件定位的重要性
在机器视觉应用之前,元件定位是非常关键的第一步。
如果图案匹配软件工具无法在图像中准确定位元件,则它将无法引导,识别,验证,计数或测量元件。尽管听起来很简单,但是在实际生产环境中,元件外观上的差异可能会使这一步骤变得非常困难。
因照明或遮挡而出现的外观变化可能导致元件定位变得困难,虽然视觉系统经过培训,基于图案来识别元件,但即使是最严格控制的流程,也允许元件外观存在一定的变化。
元件呈现或姿势畸变影响也可能导致元件定位变得困难要实现精确、可靠、可重复的结果,视觉系统的元件定位工具必须具备足够的智能,能够快速、精确地将培训图案与生产线上移动过来的实际物品进行比较。

案例应用
从测量、识别、检测等角度出发全方位进行定位和引导的研究,通过对图片中的不同类别、位置的对象进行定位和分类,实现对图片不同缺陷特征的定位和检测。
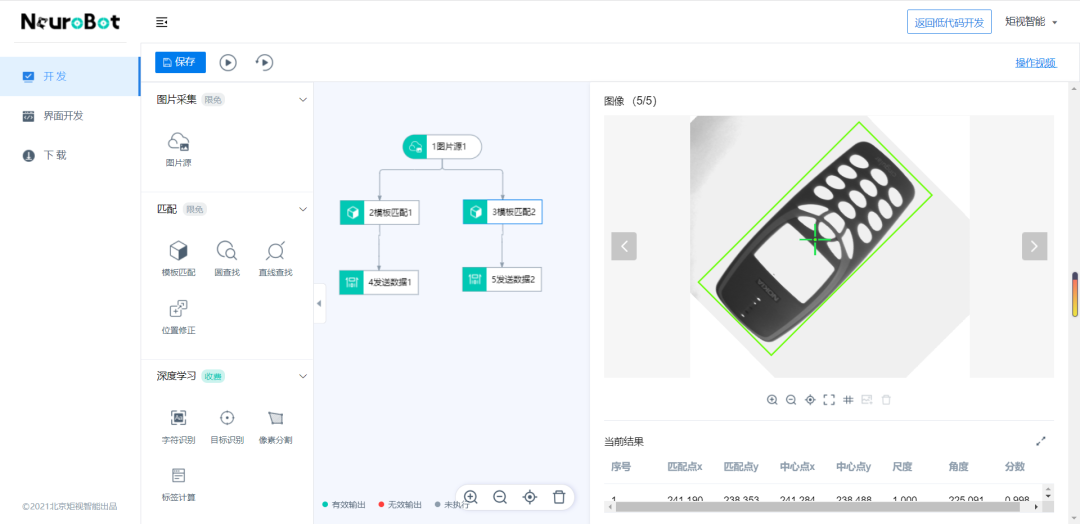
通过标注,即可建立目标模板,经过深度学习训练,便可解决平移、旋转、缩放和光线等影响。可学习图像中的多个目标,并同时检测,给出所有被识别目标的位置和定义。
根据具体问题具体分析,提出各类机器视觉技术定位与引导方案,较低成本地解决各类定位与引导的技术问题。
➡️手机外壳无序抓取、定位引导方面的应用
如果你的工业生产线中需要用到类似的机器视觉:视觉检测、视觉识别、视觉定位等技术,那么不妨和我们聊聊,我们会先根据你的需求分析,从专业的角度来给你一个合适的方案!

申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


