7.5 在Framebuffer上显示图片
本节源码位于如下目录:

7.5.1
BMP文件格式解析
BMP是一种常见的图像格式,BMP文件可看成由4个部分组成:位图文件头(bitmap-file header)、位图信息头(bitmap-information header)、调色板(colorpalette)和定义位图的字节阵列。以最简单的24位真彩色BMP文件作例子讲解:
1
位图文件头(bitmap-file header)
这部分可以理解为是一个结构体,里面的每一个成员都表示一个属性位数文件头由以下信息组成:
名称 | 字节数 | 含义 |
bfType | 2字节 | 表明它是BMP格式的文件,内容固定为0x42,0x4D,即ASCII字符中的“B”“M” |
bfSize | 4字节 | BMP文件的大小,单位为字节 |
bfReserved1 | 2字节 | 保留 |
bfReserved2 | 2字节 | 保留 |
bfOffBits | 4字节 | 位图文件头+位图信息头+调色板 |
我们用UltraEdit打开一个BMP文件,可以看到如下信息:

这是该BMP文件前32字节的数据,可以看到,前两个字节分别为0x42,0x4D。
接着后面4个字节依次是0x36,0xF9,0x15,0x00。
在BMP格式中,文件的存储方式是小端模式,即如果一个数据需要用几个字节来表示的话,那么,低位数据存在低位地址上,高位数据存在高位地址上。类似的,还有大端模式,即:如果一个数据需要用几个字节来表示的话,那么,低位数据存在高位地址上,高位数据存在低位地址上。
所以0x36,0xF9,0x15,0x00四个数据拼接方法应该是:0x0015F936(在数字中个位即最右边才是最低位),它正好就是这个文件的大小:
紧接着是4个保留位字节,其数据必须为0x00。
最后是4个字节的便宜位,可以看到位图文件头+位图信息头+调色板的大小应该是0x36。
2
位图信息头(bitmap-information header)
位图信息头也可以理解为是一个结构体,其成员有:
名称 | 字节数 | 含义 |
biSize | 4 | 整个位图信息头结构体的大小 |
biWidth | 4 | 图像宽度,单位为像素 |
biHeight | 4 | 图像高度,单位为像素。此外,这个数的正负可以判断图像是正向还是倒向的,若为正,则表示是正向;若为负,则表示反向。其实根本不同就是坐标系的建立方法不一样。后面写代码时会讲。 |
biPlanes | 2 | 颜色平面书,其值总为1 |
biBitCount | 2 | 即1个像素用多少位的数据来表示,其值可能为1,4,8,16,24,32。我们是以24位真彩色为例子讲解的 |
biCompression | 4 | 数据的压缩类型 |
biSizeImage | 4 | 图像数据的大小,单位为字节 |
biXPelsPerMeter | 4 | 水平分辨率,单位是像素/米 |
biYPelsPerMeter | 4 | 垂直分辨率,单位是像素/米 |
biClrUsed | 4 | 调色板中的颜色 |
biClrImportant | 4 | 说明有对图像有重要影响的颜色索引的数目,若为0,表示都重要 |
对照源文件数据:
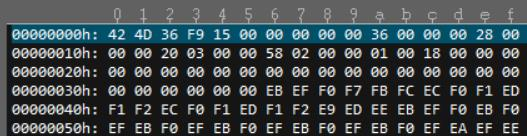
0E-11:00000028h=40,表示这个结构体大小是40字节。
12-15:00000320h=800,图像宽为800像素。
16-19:00000258h=600,图像高为600像素,与文件属性一致。这是一个正数,说明图像是正向的,数据是以图像左下角为原点,以水平向右为X轴正方向,以垂直向上为Y轴正方向排列的。若为负,则说明图像是反向的,数据是以图像左上角角为原点,以水平向右为X轴正方向,以垂直向下为Y轴正方向排列的。
1A-1B:0001h,该值总为1。
1C-1D:0018h=24,表示每个像素占24个比特,即24位真彩色
上面这几个信息跟文件属性是一致的:
1E-21:00000000h,BI_RGB,说明本图像不压缩。
22-25:00000000h,图像的大小,因为使用BI_RGB,所以设置为0。
26-29:00000000h,水平分辨率,缺省。
2A-2D:00000000h,垂直分辨率,缺省。
2E-31:00000000h,对于24位真彩色来说,是没有调色板的,所以为0。
32-35:00000000h,对于24位真彩色来说,是没有调色板的,所以为0。
3
调色板(color palette)
24位真彩色没有调色板,这里为了简化不赘述。
4
定义位图的字节阵列
这一部分就是真正的图像数据了,24位真彩色数据是按按BGR各一字节循环排列而成。
代码实现:
151617 typedef struct tagBITMAPFILEHEADER { /* bmfh */18 unsigned short bfType;19 unsigned int bfSize;20 unsigned short bfReserved1;21 unsigned short bfReserved2;22 unsigned int bfOffBits;23 } BITMAPFILEHEADER;2425 typedef struct tagBITMAPINFOHEADER { /* bmih */26 unsigned int biSize;27 unsigned int biWidth;28 unsigned int biHeight;29 unsigned short biPlanes;30 unsigned short biBitCount;31 unsigned int biCompression;32 unsigned int biSizeImage;33 unsigned int biXPelsPerMeter;34 unsigned int biYPelsPerMeter;35 unsigned int biClrUsed;36 unsigned int biClrImportant;37 } BITMAPINFOHEADER;3839404142 static int DecodeBmp2Rgb(const char *strFileName, PT_PictureData ptData) ;43 static void ReleaseBmp2Rgb(PT_PictureData ptPicData);44 static T_Picture2RGB g_tBmp2RgbOpr = {45 .name = "bmp2rgb",46 .PictureParsing = DecodeBmp2Rgb,47 .PictureRelease = ReleaseBmp2Rgb,48 };495051 /**********************************************************************52 * 函数名称:IsBmp53 * 功能描述:判断该文件是否为 BMP 文件54 * 输入参数:ptFileMap - 内含文件信息55 * 输出参数:无56 * 返 回 值:0 - 是 BMP 格式, -1 -不是 BMP 格式57 ***********************************************************************/58 int IsBmp(FILE **ppFp, const char *strFileName)59 {60 char strCheckHeader[2];61 *ppFp= fopen(strFileName, "rb+");62 if (*ppFp== NULL) {63 return -1;64 }65 if (fread(strCheckHeader, 1, 2, *ppFp) != 2)66 return -1;6768 if (strCheckHeader[0] != 0x42 || strCheckHeader[1] != 0x4d)69 return -1;70 else71 return 0;72 }73747576 /**********************************************************************77 * 函数名称:MapFile78 * 功能描述:使用 mmap 函数映射一个文件到内存,以后就可以直接通过内存来访问文件79 * 输入参数:PT_PictureData ptData 内含图像数据80 * 输出参数:ptData->iFileSize : 文件大小81 * ptData->pucFileData : 映射内存的首地址82 * 返 回 值:0 - 成功其他值 - 失败83 ***********************************************************************/84 int MapFile(PT_PictureData ptData)85 {86 int iFd;87 struct stat tStat;8889 /* 打开文件 */90 iFd = fileno(ptData->ptFp);91 fstat(iFd, &tStat);92 ptData->iFileSize= tStat.st_size;93 ptData->pucFileData= (unsigned char *)mmap(NULL , tStat.st_size, PROT_READ | PROT_WRITE, MAP_SHARED, iFd, 0);94 if (ptData->pucFileData == (unsigned char *)-1)95 {96 printf("mmap error!\n");97 return -1;98 }99 return 0;100 }101102 /**********************************************************************103 * 函数名称:DecodeBmp2Rgb104 * 功能描述:把 BMP 文件转化为 rgb 格式105 * 输入参数:strFileName - 文件名106 * ptData - 内含图像信息107 * 返 回 值:0 - 成功其他值 - 失败108 * -1 - 文件不是 BMP 格式109 * -2 - 不支持的 bpp110 * -3 - 图像缓存区分配失败111 ***********************************************************************/112 static int DecodeBmp2Rgb(const char *strFileName, PT_PictureData ptData) {113 int x,y;114 int iPos = 0;115 int iLineWidthAlign;116 BITMAPFILEHEADER *ptBITMAPFILEHEADER;117 BITMAPINFOHEADER *ptBITMAPINFOHEADER;118 unsigned char *aFileHead;119 unsigned char *pucSrc;120 unsigned char *pucDest;121 int iLineBytes;122123 /* 判断该文件是否为 BMP 格式 */124 if (IsBmp(&ptData->ptFp, strFileName))125 return -1;126127 /* 将 BMP 文件映射到内存空间 */128 MapFile(ptData);129130131 aFileHead = ptData->pucFileData;132133 ptBITMAPFILEHEADER = (BITMAPFILEHEADER *)aFileHead;134 ptBITMAPINFOHEADER = (BITMAPINFOHEADER *)(aFileHead + sizeof(BITMAPFILEHEADER));135 /* 获取必要的图像信息 */136 ptData->iWidth = ptBITMAPINFOHEADER->biWidth;137 ptData->iHeight = ptBITMAPINFOHEADER->biHeight;138 ptData->iBpp = ptBITMAPINFOHEADER->biBitCount;139 iLineBytes = ptData->iWidth*ptData->iBpp/8;//一行数据的字节数140 ptData->iBmpDataSize= ptData->iHeight * iLineBytes;//整个 BMP 图像的字节数141 /*暂时只支持 24bpp 格式*/142 if (ptData->iBpp != 24)143 {144 printf("iBMPBpp = %d\n", ptData->iBpp);145 printf("sizeof(BITMAPFILEHEADER) = %d\n", sizeof(BITMAPFILEHEADER));146 return -2;147 }148149 /* 分配空间 */150 ptData->pucBmpData = malloc(ptData->iBmpDataSize);151 ptData->pucRgbData = malloc(ptData->iBmpDataSize);152153 if (NULL == ptData->pucBmpData||NULL == ptData->pucRgbData)154 return -2;155156 /* 从 bmp 文件中读取图像信息,24bpp 的 BMP 图像为 BGR 格式 */157 pucDest = ptData->pucBmpData;158 iLineWidthAlign = (iLineBytes + 3) & ~0x3; /* 向 4 取整 */159 pucSrc = aFileHead + ptBITMAPFILEHEADER->bfOffBits;160161 pucSrc = pucSrc + (ptData->iHeight - 1) * iLineWidthAlign;162163 /* 对于 bmp 文件中的源数据,是以左下角为原点计算坐标的,因此拷贝数据时需要转换坐标 */164 for (y = 0; y < ptData->iHeight; y++)165 {166 memcpy(pucDest, pucSrc, ptData->iWidth*3);167 pucSrc -= iLineWidthAlign;168 pucDest += iLineBytes;169 }170171172 /* 将得到的 BGR 数据转化为 RGB 数据 */173 for (y = 0; y < ptData->iHeight; y++){174 for(x = 0;xiWidth*3;x+=3){ 175 ptData->pucRgbData[iPos++] = ptData->pucBmpData[y*ptData->iWidth*3+x+2];176 ptData->pucRgbData[iPos++] = ptData->pucBmpData[y*ptData->iWidth*3+x+1];177 ptData->pucRgbData[iPos++] = ptData->pucBmpData[y*ptData->iWidth*3+x+0];178 }179 }180181 return 0;182183 }184185186187 /**********************************************************************188 * 函数名称:ReleaseBmp2Rgb189 * 功能描述:释放解析及使用 BMP 时的空间190 * 输入参数:ptData - 内含图像信息191 * 返 回 值:无192 ***********************************************************************/193 static void ReleaseBmp2Rgb(PT_PictureData ptData){194 free(ptData->pucRotateData);195 free(ptData->pucZoomData);196 free(ptData->pucRgbData);197 free(ptData->pucBmpData);198 if(munmap(ptData->pucFileData,ptData->iFileSize)!=0)199 printf("munmap fault\n");200 }201202 /**********************************************************************203 * 函数名称:GetBMPPaser204 * 功能描述:返回"BMP 解析器"205 * 输入参数:无206 * 输出参数:无207 * 返 回 值:BMP 解析器的指针208 ***********************************************************************/209 PT_Picture2RGB GetBMPPaser(void)210 {211 return &g_tBmp2RgbOpr;212 }
7.5.2
在LCD上显示BMP图像
让BMP文件在开发板的LCD上显示出来,有几个需要注意的点:
1.开发板LCD上的显示格式是RGB格式的,而且有多种表示格式:可能用2字节表示(RGB565格式),可能用3字节表示(RGB888),而原始的24位真彩色BMP文件则是按BGR格式排列的,需要对原始的图像数据进行转化。
2.在转化过程中,LCD上的显存地址固定是以LCD左上角为首地址,而BMP格式中正向图像是以图片的左下角为数据首地址的。因此在进行数据转化时还需要注意坐标的变换。
代码实现:
20 int setpixel(int x, int y, int color)21 {22 unsigned int offset;23 unsigned short color_16;24 unsigned int r, g, b;25 unsigned short *p16;26 unsigned int *p32;2728 /* 1. get offset */29 offset = y * g_line_length + x*g_bytes_per_pixel;3031 /* 2. color convert to ... */32 switch (g_var.bits_per_pixel)33 {34 case 8:35 {36 return -1;37 break;38 }39 case 16:40 {41 /* RGB565 */42 r = (color >> 16) & 0xff;43 g = (color >> 8) & 0xff;44 b = (color >> 0) & 0xff;4546 r >>= 3;47 g >>= 2;48 b >>= 3;4950 color_16 = (r<<11) | (g << 5) | b;5152 /* 3. write buffer */53 p16 = (unsigned short *)(g_fb + offset);54 *p16 = color_16;55 return 0;56 }57 case 32:58 {59 /* 3. write buffer */60 p32 = (unsigned int *)(g_fb + offset);61 *p32 = color;62 return 0;63 }64 }65 return -1;66 }6768 /* ./show_bmp /dev/fb0*/ 69 int main(int argc, char **argv)70 {71 int fd;72 PT_Picture2RGB bmpParser;73 T_PictureData tpicData;7475 int xMax, yMax;7677 /* 1. open */78 if (argc != 3)79 {80 printf("Usage: %s, argv[0]); \n" 81 return -1;82 }8384 fd = open(argv[1], O_RDWR);85 if (fd < 0)86 {87 printf("can not open %s\n", argv[1]);88 return -1;89 }909192 /* 2. get var screen info */93 if (ioctl(fd, FBIOGET_VSCREENINFO, &g_var))94 {95 printf("can't get var\n");96 return -1;97 }98 g_line_length = g_var.xres * g_var.bits_per_pixel / 8;99 g_bytes_per_pixel = g_var.bits_per_pixel / 8;100101102 /* 3. mmap */103 g_fb = mmap(NULL, g_line_length * g_var.yres, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);104 if (g_fb == (void *)-1)105 {106 printf("can't mmap\n");107 return -1;108 }109110 /* 4. 使用 BMP 解析器 解析 BMP 文件 */111 bmpParser = GetBMPPaser();112 bmpParser->PictureParsing(argv[2], &tpicData);113114 /* 5. 在 LCD 上显示 : tpicData.pucRgbData */115 xMax = tpicData.iWidth > g_var.xres ? g_var.xres : tpicData.iWidth;116 yMax = tpicData.iHeight > g_var.yres ? g_var.yres : tpicData.iHeight;117118 for (int x = 0; x < xMax; x++)119 for (int y = 0; y < yMax; y++)120 {121 unsigned int iLineBytes = tpicData.iWidth*tpicData.iBpp/8;//一行数据的字节数122 unsigned int offset = y * iLineBytes + x*tpicData.iBpp/8;123 unsigned char *p = tpicData.pucRgbData + offset;124 unsigned int color = ((unsigned int)p[0]<<16) | ((unsigned int)p[1]<<8) | ((unsigned int)p[2]);125 setpixel(x, y, color);126 }127 bmpParser->PictureRelease(&tpicData);128 return 0;
7.5.3
上机实验
编译:
source /opt/remi-sdk/environment-setup-aarch64-poky-linux$CC -I ./ -o show_bmp show_bmp.c bmp2rgb.c
假设设置开发板的IP为:192.168.5.9,上传程序到开发板上
scp ./24bpp.bmp root@192.168.5.9:/mnt/scp ./show_bmp root@192.168.5.9:/mnt/
测试:进入/mnt目录运行程序:
root@myir-remi-1g:~root@myir-remi-1g:/mnt24bpp.bmp show_bmp
在运行程序前,请确保已经接好HMDI显示屏。
root@myir-remi-1g:/mnt# ./show_bmp /dev/fb0 24bpp.bmp运行程序后,可以看到HDMI显示屏上会显示bmp图片。
如您在使用瑞萨MCU/MPU产品中有任何问题,可识别下方二维码或复制网址到浏览器中打开,进入瑞萨技术论坛寻找答案或获取在线技术支持。
https://community-ja.renesas.com/zh/forums-groups/mcu-mpu/
未完待续
推荐阅读
Linux I2C设备访问方法 - RZ MPU工业控制教程连载(9)
用户态接口应用与编写APP - RZ MPU工业控制教程连载(10)
Linux SPI协议介绍与访问方法 - RZ MPU工业控制教程连载(11)