 )中, “跟车时间间距”
)中, “跟车时间间距” 定义如下:
定义如下:
 是前面的车辆和本车之间的距离间隔,并且
是前面的车辆和本车之间的距离间隔,并且 是本车车速,该间隙表示“从前方车辆的尾部表面到目标车辆的前表面的距离”。
是本车车速,该间隙表示“从前方车辆的尾部表面到目标车辆的前表面的距离”。  和车速
和车速 之间的关系的一阶和二阶回归模型:的一阶回归模型:
之间的关系的一阶和二阶回归模型:的一阶回归模型: 的二阶回归模型:
的二阶回归模型:
 表示速度为0时的车间距,
表示速度为0时的车间距, 是线性系数,
是线性系数, 是二次系数。的一阶回归拟合与车间距的二阶回归拟合,发现车间距的一阶回归拟合就可以很好的描述驾驶员的稳态跟随情况,所以,在这里取
是二次系数。的一阶回归拟合与车间距的二阶回归拟合,发现车间距的一阶回归拟合就可以很好的描述驾驶员的稳态跟随情况,所以,在这里取 。
。 是线性系数,即取“跟车时间间距”. u 表示受控车辆的加速度,干扰量
是线性系数,即取“跟车时间间距”. u 表示受控车辆的加速度,干扰量 表示为前方车辆加速度,跟车的状态矩阵
表示为前方车辆加速度,跟车的状态矩阵 表示为:
表示为:
 表示期望的车间距,即利用车间距的一阶回归模型计算得到的结果,表示实际车间距,即利用激光雷达测得的车间距;
表示期望的车间距,即利用车间距的一阶回归模型计算得到的结果,表示实际车间距,即利用激光雷达测得的车间距; 表示前方车辆的速度,
表示前方车辆的速度, 表示本车车辆的速度,稳态跟随情况下车辆的控制可以看作线性二次优化问题,最小跟随距离误差和速度误差的状态反馈控制原理及控制输入的设计如下:
表示本车车辆的速度,稳态跟随情况下车辆的控制可以看作线性二次优化问题,最小跟随距离误差和速度误差的状态反馈控制原理及控制输入的设计如下:
 有如下表示:
有如下表示:
 来使最代价函数小化。通过求解公式J可以确定受控车辆的期望加速度。根据李雅普诺夫的第二法和黎卡提方程有:
来使最代价函数小化。通过求解公式J可以确定受控车辆的期望加速度。根据李雅普诺夫的第二法和黎卡提方程有:
 的计算表达式如下:
的计算表达式如下:
 是黎卡提方程的正定稳态解。因此,期望的加速度表示为:
是黎卡提方程的正定稳态解。因此,期望的加速度表示为:
 与
与 是受控车辆的速度的函数,表示控制增益,并且是通过调整加权矩阵
是受控车辆的速度的函数,表示控制增益,并且是通过调整加权矩阵 和
和 得到的。由于加权矩阵和
得到的。由于加权矩阵和 对车辆系统的性能有影响,因此选择加权因子
对车辆系统的性能有影响,因此选择加权因子 和
和 或者选择对应的
或者选择对应的 来实现受控车辆的自动控制。
来实现受控车辆的自动控制。 来进行判断,当下式成立时则认为危险:
来进行判断,当下式成立时则认为危险:
 为危险临界的
为危险临界的 的值,一般可取0.5。
的值,一般可取0.5。
 表示的是紧急制动时的增益系数。
表示的是紧急制动时的增益系数。
 表示论域,把上的实值函数记为
表示论域,把上的实值函数记为 ,那么则有下式成立:
,那么则有下式成立: 
 为中的任意一个元素,那么
为中的任意一个元素,那么 表示的就是对于
表示的就是对于 的隶属度,因此,把称为隶属度函数。可以通过控制达到控制的目的。
的隶属度,因此,把称为隶属度函数。可以通过控制达到控制的目的。 表示完全归属于
表示完全归属于 表示完全不归属于
表示完全不归属于 表示不完全归属于,即介于前两者之间。
表示不完全归属于,即介于前两者之间。
 为函数的中心值,
为函数的中心值, 表示函数的宽度。
表示函数的宽度。
 为三角形的三个形状参数。
为三角形的三个形状参数。
 为梯形的四个形状参数。
为梯形的四个形状参数。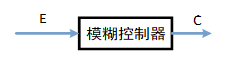
 ,作为模糊控制器的输入信号,即:
,作为模糊控制器的输入信号,即:
 为驾驶员的期望车速,为受控车辆的本车车速。
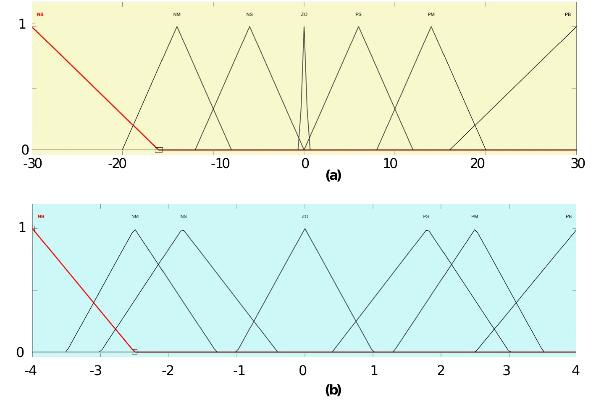
为驾驶员的期望车速,为受控车辆的本车车速。 而言,采用七个模糊语言子集来确定,即
而言,采用七个模糊语言子集来确定,即 ,分别对应负大、负中、负小、零、正小、正中、正大,输入变量的论域为
,分别对应负大、负中、负小、零、正小、正中、正大,输入变量的论域为 ;对于输出变量,即期望加速度
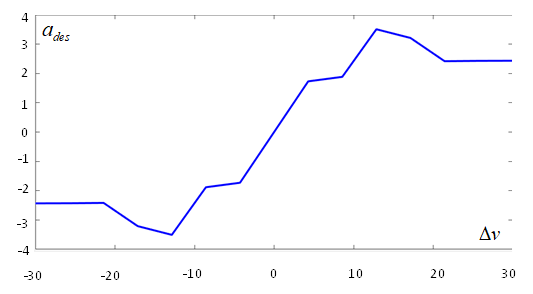
;对于输出变量,即期望加速度 ,也采用七个模糊语言子集来确定,即,输出变量的论域为
,也采用七个模糊语言子集来确定,即,输出变量的论域为 ,这里主要考虑到速度跟随过程中的舒适性,所以不采用较大的加减速度。
,这里主要考虑到速度跟随过程中的舒适性,所以不采用较大的加减速度。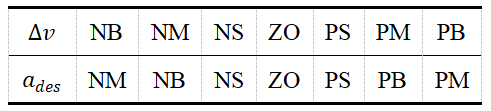
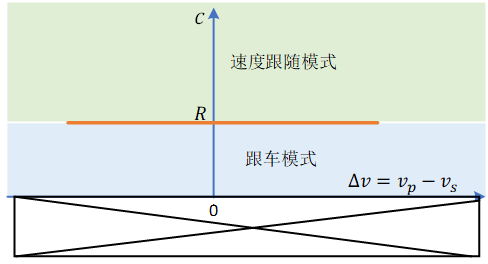
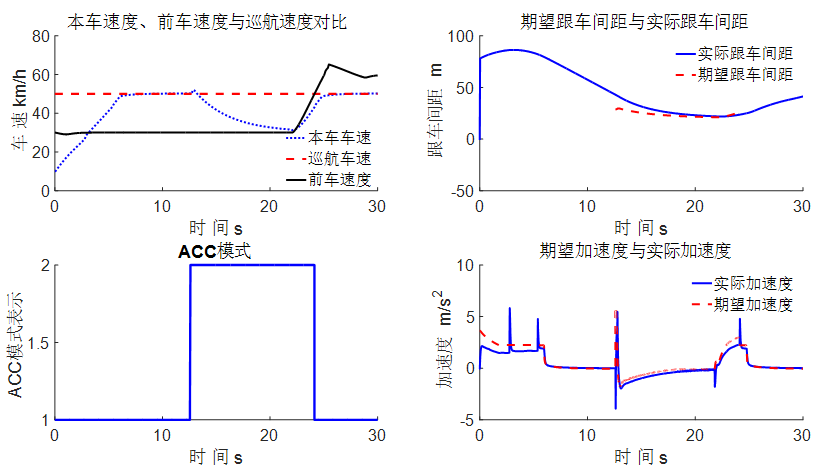
 中,三四象限表示车间距为负值,即车辆会发生碰撞,这是不允许的,所以三四象限为死区,不需要考虑。模式切换线为一、二象限中的一条水平直线,这条直线表示车间距为
中,三四象限表示车间距为负值,即车辆会发生碰撞,这是不允许的,所以三四象限为死区,不需要考虑。模式切换线为一、二象限中的一条水平直线,这条直线表示车间距为 ,当车间距大于
,当车间距大于 时,ACC处于速度跟随模式,当车间距介于
时,ACC处于速度跟随模式,当车间距介于 之间时,ACC处于跟车模式,很显然,这种模式判别条件仅与车间距有关,而没有考虑车速、相对车速的影响。
之间时,ACC处于跟车模式,很显然,这种模式判别条件仅与车间距有关,而没有考虑车速、相对车速的影响。  是负的,在这象限内的沿任何轨迹的运动,所代表的车间距都不会增加,从物理上来说,这意味着主车(受控车辆)接近前车,因为它的速度比前车大,类似的推理表明,车辆的对应状态处于第一象限时,主车与前车的车间距不会减小,这意味着主车(受控车辆)远离前车。因此,可以说,车辆运动状态处于第一象限时比处于第二象限时更为安全,所以,当受控车辆由速度跟随模式切换到跟车模式时,车辆状态处于第一象限时比处于第二象限时可以 “更晚”的进行切换,并且,速度差值
是负的,在这象限内的沿任何轨迹的运动,所代表的车间距都不会增加,从物理上来说,这意味着主车(受控车辆)接近前车,因为它的速度比前车大,类似的推理表明,车辆的对应状态处于第一象限时,主车与前车的车间距不会减小,这意味着主车(受控车辆)远离前车。因此,可以说,车辆运动状态处于第一象限时比处于第二象限时更为安全,所以,当受控车辆由速度跟随模式切换到跟车模式时,车辆状态处于第一象限时比处于第二象限时可以 “更晚”的进行切换,并且,速度差值 越大时,车辆间的安全性更高。所以,可以采取更为合理的模式切换线,如图所示
越大时,车辆间的安全性更高。所以,可以采取更为合理的模式切换线,如图所示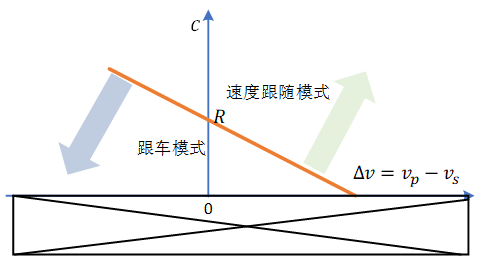

 ,一般取值
,一般取值 , R表示两车相对速度为0时,理想的车间距,R
, R表示两车相对速度为0时,理想的车间距,R , C0为两车静止时的理想车距,
, C0为两车静止时的理想车距, 表示跟车时距,表示前车的车速。
表示跟车时距,表示前车的车速。