
摘要:文章致力于研究开发纯电动商用车底盘的协同控制器,通过车辆动力学建模和深度学习与比例-积分-微分(PID)控制技术的结合,设计了转向制动协同控制器,通过仿真验证了控制器的有效性和稳定性。仿真结果显示,纯电动商用车的操控性和安全性得到了良好提升,为商用车的电动化发展提供了支持。
车辆动力学稳定控制对驾驶安全至关重要,并受到广泛关注。之前的研究提出了多种改善操控稳定性的方法[1-2]。随着自动驾驶技术的发展,智能车辆控制引起了研究人员的兴趣,包括各种先进的驾驶辅助系统和自动驾驶技术[3]。许多研究学者将纯电动商用车作为研究对象,因其具备零尾气排放、低成本、静音环保和高效能等特性。传统纯电动商用车辆采用的电子稳定控制系统(Electronic Stability Controller, ESC)通过主动制动控制提供额外的偏航力矩。然而额外的偏航力矩并不能明显提升操稳性能,随着技术的发展,提出了直接偏航力矩控制和主动前轮转向控制,其被认为可有效提升操纵稳定性[4]。而直接偏航力矩控制可能会对车辆纵向动力学产生不良影响,主动前轮转向控制在侧向轮胎力非线性区域存在一定的局限性。因此,集成直接偏航力矩控制和主动前轮转向控制被认为可以实现最佳效果。本文旨在解决此协调控制问题,探索新的方法以提高车辆的操纵稳定性。其中协同控制器设计分为两个主要部分:第一部分,采用深度学习结合比例-积分-微分(Proportion-Integral-Differential, PID)方法,以获取预期的附加横摆力矩。第二部分,构建了转向与制动协同控制策略,对前轮转角和制动压力进行仲裁分配。最后,通过仿真验证了该协同控制算法的有效性。
1 动力学建模分析
本文主要考虑车辆的横向动力学,复杂的车辆动力学模型可能会给控制器的设计和实时操作带来巨大挑战。因此,本文采用了一个二自由度的车辆动力学模型来设计协调控制器,如图1 所示。其中,OXY 表示大地参考系,Cxy 表示车辆参考系。

图1 车辆动力学模型
使用质心侧偏角和横摆率作为变量,描述车辆的横向动力学方程[5],如下:

式中,m 为车辆总质量;Iz 为横摆转动惯量;lf、lr 分别为前轴和后轴至质心的距离;r 为横摆率;β为质心侧偏角;δ 为前轮转向角;Cf、Cr 为前轮侧偏刚度;αf、αr 为前、后轮侧偏角;αr 为后轮侧偏角;v 为车速;Fyf、Fyr 为广义前、后轮侧向力;Df 为轮距。由于Fyf=Fyfl+Fyfr,Fyr=Fyrl+Fyrr,其中Fyij 分别表示四个轮胎的侧向力,i=f,r,j=l,r。当车辆受到较小的横向加速度时,其轮胎处于线性区域内运行。因此,车辆的横向力Fyf 和Fyr 可以根据简单的线性轮胎模型计算,该模型采用了等效轮胎侧向刚度Cf 和 Cr其表达式如下:

式中,αf 和αr 分别为![]()
经过等式变化将式(1)重新改写后得

式中![]()
![]()
把式(4)改写为状态空间方程形式,则有
![]()
式中,![]()

![]()
式中, 为稳定参数。
为稳定参数。
协同控制系统设计分为两层。在上层控制器中,建立横摆角速度误差系统,利用深度学习算法回归得到PID 控制算法参数,进而得到附加的横摆力矩。最后,在下层控制器中,根据不同的仲裁策略对附加横摆力矩进行分配,计算补偿转角,合理地分配各个轮胎的制动压力。
2.1 被控模型
基于式(1)被动模型,建立主动系统空间状态方程如下:

式中:
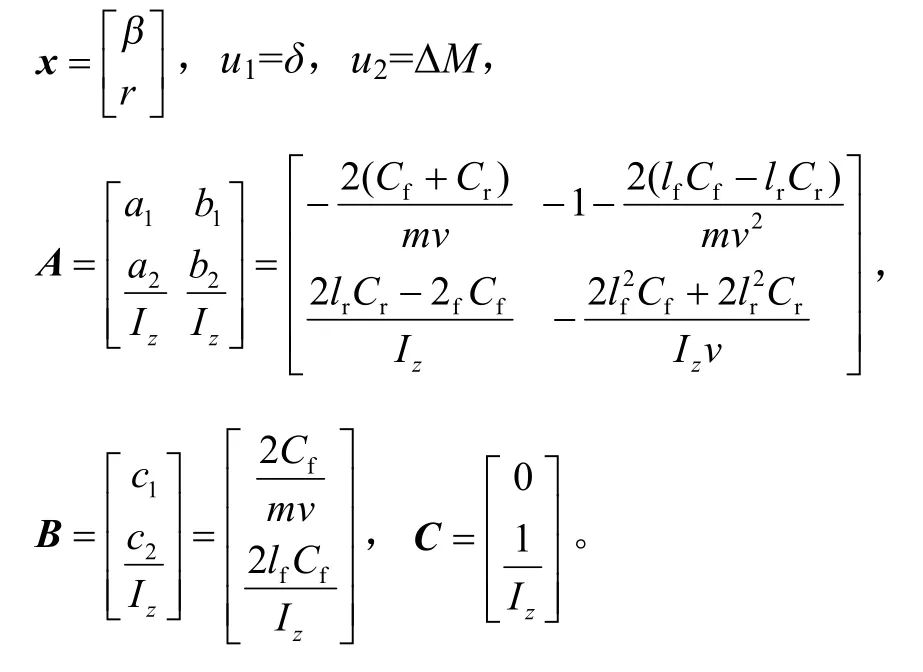
式中,∆M 为附加横摆力矩,A、B、C 分别为状态转移矩阵、转角系数矩阵和控制矩阵。
2.2 上层控制器设计
本节控制算法采用深度学习回归算法与PID算法结合的方式设计一个具有较高泛化能力的综合控制器。深度学习算法能够从原始数据中学习到更高级别的特征表示,而无需手工设计特征[6]。这样可以减少特征工程的工作量,并提高模型的性能,同时具有较强的稳定性。PID 技术被广泛应用于工业界,其能够快速响应系统的变化,具有较高的鲁棒性[7]。
基于此,构建控制算法函数为

式中,e(t)=β-βd 为实际侧偏角度与理想状态下的误差;Kp,Ki,Kd 的三个函数为深度学习回归算法求解,其含义分别为比例,积分,微分系数。
理想状态情况下根据式(7),可得

使用深度学习算法计算PID 控制器的上层控制器,选取如下:
1)训练数据:不同转角δ,被动系统模型仿真输出数据β,及理想状态得到的∆M。数据采集工况包括车辆空载状态,在干燥的公路上以两种车速行驶(每小时40 km 和60 km)分别采集。环境温度为20 ℃。转角采集范围为-360°到360°,每隔60°采样一次,共计12 个转角条件。
2)模型搭建:通过选择多层感知器作为神经网络结构,此结构模型为序贯模型,模型深度为10 层,每层128 个神经元。
3)损失函数:均方误差(Mean Squared Error,MSE)作为损失函数,其表达式如下:
![]()
式中, 为理想状态下变量值;yi 为真实状态变量值。
为理想状态下变量值;yi 为真实状态变量值。
4)模型迭代:使用梯度下降优化算法来更新神经网络模型的参数β。
5)模型输出:预测输出Kp=19 860,Ki=13,Kd=33。
最后将深度学习模型的预测结果带入控制算法函数式(8)中,即可获得期望的附加横摆力矩∆M。用于下层控制器的设计。
2.3 下层控制器设计
协同控制器通过附加横摆力矩来控制车辆的行驶稳定性。主动转向系统只能在一定范围内修正前轮转角,对横向稳定性的影响有限。在临界失稳状态下,协同控制器介入,在轮胎施加制动力,以维持车辆的横摆动力学稳定。定义动力学稳定性因数为ε[4],其公式如下:
![]()
式中,τ 为权重分配系数,协同控制器的阈值εth约为0.2,结合实车调参,并通过Trucksim 仿真实验进行分析,确定其取值。当ε≤εth 时,协同控制器执行修正前轮转角;当ε>εth 时,协同控制器主导控制以实现及时反馈干预。在转向过程中,协同控制器触发附加横摆力矩时,忽略轮胎侧偏角。
1)当ε≤εth 时,由图1 可得力矩计算关系:

由于第2 节中Fyfr、Fyfl、Fyrl、Fyrr、lr、lr 已知,进而可以求出δ 修正。
则修正转角为

2)当ε>εth 时,由图1 可得力矩计算关系:
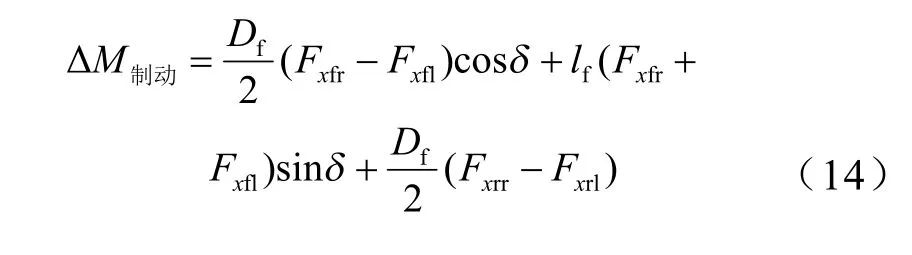
式中,Fxfr、Fxfl、Fxfr、Fxfl 分别为由∆M 引起的地面对轮胎作用力。
当所需∆M 制动>0 时,优先对左后轮施加制动力矩,力矩不足时再对左前轮施加额外制动力矩,左侧轮胎作用力分配关系满足:
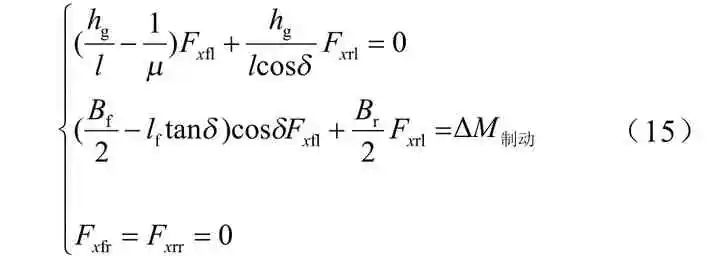
式中,hg 为车辆质心距地面高度;μ 为路面附着系数;Bf、Br 分别为车辆前、后轴的轮距。同理∆M 制动<0 时,优先对右后轮施加制动力矩,其次,再对右前轮施加制动力矩,分配公式与式(15)相似,将左侧轮胎力换为右侧轮胎力,即完成制动力分配。


图2 单变道操纵下的前轮转向角
图3展示了单变道操纵下无控制和协同控制的对比结果,并显示了下层控制器输出的附加横摆力矩所分配的各轮制动力和主动补偿转角的仿真结果。可以看出,协同控制器有效地协调分配制动力矩,并对转角进行补偿。相较于无控制系统,协同控制器有效地控制了质心侧偏角和横摆率,提升了车辆的操纵稳定性。

图3 单变道操纵下综合性能比较
