
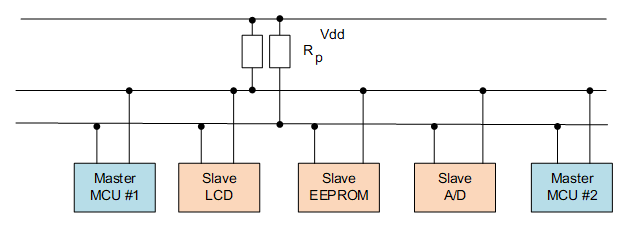
同步、双向、半双工的两线式串行接口总线。这里,半双工的含义是指在任意给定的时刻,只有一个方向上是可以通信的。
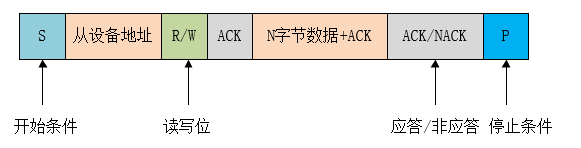
开始条件:SCL 为高电平时,主机将SDA 拉低,表示数据传输即将开始。
从机地址:主机发送的第一个字节为从机地址,高7 位为地址,最低位为R/W 读写控制位,1 表示读操作,0 表示写操作。

应答信号:每传输完成一个字节的数据,接收方就需要回复一个ACK(acknowledge)。写数据时由从机发送ACK,读数据时由主机发送ACK。当主机读到最后一个字节数据时,可发送NACK(Notacknowledge)然后跟停止条件。
数据:从机地址发送完后可能会发送一些指令,依从机而定,然后开始传输数据,由主机或者从机发送,每个数据为8 位,数据的字节数没有限制。
重复开始条件:在一次通信过程中,主机可能需要和不同的从机传输数据或者需要切换读写操作时,主机可以再发送一个开始条件。
停止条件:在SDA 为低电平时,主机将SCL 拉高并保持高电平,然后在将SDA 拉高,表示传输结束。
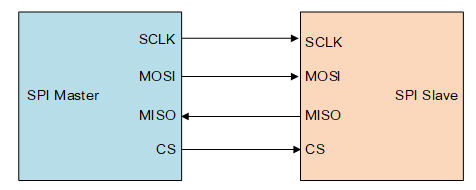
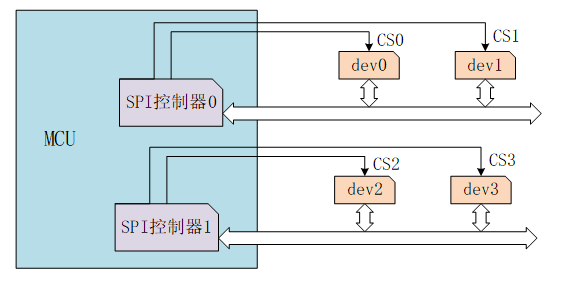
同步、双向、全双工的4线式串行接口总线,最早由Motorola公司提出。SPI是由“单个主设备+多个从设备”构成的系统。需要说明的是:在系统中,只要任意时刻只有一个主设备是处于激活状态的,就可以存在多个SPI主设备。常运用于EEPROM、FLASH、实时时钟、AD转换器、数字信号处理器和数字信号解码器之间实现通信。
通用异步收发传输器,UART 作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。在应用程序开发过程中使用频率较高的数据总线。

异步半双工通信协议,也称为Dallas 1-Wire®协议。其中,按照主-从通信模型,只使用单条信号线DQ实现通信。

作者:Iriczhao 原文:https://www.cnblogs.com/iriczhao/p/10816426.html
往期好文合集
若觉得文章不错,转发分享,也是我们继续更新的动力。
5T资源大放送!包括但不限于:C/C++,Linux,Python,Java,PHP,人工智能,PCB、FPGA、DSP、labview、单片机、等等!


