

点击蓝字 关注我们



欢迎来到模拟芯视界

在上期中,我们介绍了电压基准噪声对 ADC ENOB 和无噪声分辨率的影响,展示了应如何选择电压基准,并更大限度地提高 ADC 性能。
本期,为大家带来的是《借助毫米波雷达传感器打造可居家使用的多患者非接触式生命体征传感器》,我们将深入探讨毫米波雷达传感器如何通过其调频连续波 (FMCW) 检测和多输入多输出 (MIMO) 天线雷达系统的组合,实现对细微运动的高精度检测。

引言
人类生命体征通常通过监测系统进行测量,这些系统历来依靠与患者身体的有线连接,通过心电图和氧饱和度传感器的组合来报告心率和呼吸频率。这些传感器很难与新生儿、严重烧伤患者、癫痫患者或精神病患者保持持续接触。对于那些行动自如的患者,当他们在家中四处走动时,监测生命体征可能不那么容易。
毫米波 (mmWave) 雷达传感器可以检测非常细微的运动,即使是患者胸部的起伏。由于胸部运动受呼吸(基频)和心率运动(额外谐波)的影响,因此对胸部运动的精细测量可以实现对生命体征的非接触式测量。
该功能的主要促成因素是传感器能够通过调频连续波 (FMCW) 检测和多输入多输出 (MIMO) 天线雷达系统的组合来检测患者胸部的位置和速度。
该传感器还可以检测床上的运动并向护理人员告知潜在的褥疮,甚至可以同时监测多个患者,例如一对老年夫妇。此外,毫米波传感器可以检测到人员跌倒并实时通知护理人员。
集成的重要
线性调频脉冲斜坡线性度是确保 FMCW 系统中准确且可重复测量的参数之一。将整个模拟链集成在单片微波集成电路上,不仅可以减少设计与设计之间的差异,还有助于提高整体测量线性度,因为可以在老化和温度范围内执行有效的监测和校准。
查看图 1 中德州仪器 (TI) IWR6843 的方框图可以发现,发送器-接收器部分的唯一外部元件是标准 40MHz 晶体。除了这个外部 40MHz 晶体之外,IWR6843 还提供完全的发送器/接收器集成,具有:
斜坡发生器。
小数锁相环。
20GHz 压控振荡器 (VCO),当从外部路由(或从外部源选择)时,可同步多个前端并在显著更大的虚拟天线上实现相干采样。
IWR6843 还包含用于发送器和接收器的完整射频 (RF) 链,其中包括:
软件可编程功率放大器,可实现多级发送功率,从而在根据环境和射频法规调整链路预算时实现更大的灵活性。
用于波束控制的动态可编程移相器。
低噪声放大器,当与功率放大器一起编程时,可对链路预算进行微调。
可通过发送和接收线性调频脉冲生成中间频率 (IF) 的混频器。
IF 模拟滤波器。
采样频率高达 25MHz 的模数转换器 (ADC)。

图1. IWR6843 方框图
在 MMIC 片上系统集成完整的射频链可实现功能安全所需的诊断能力水平。
IWR6843 上的全数字信号链处理集成可提供:
雷达硬件加速器,支持经典雷达信号处理中的 16 位测距、多普勒或到达角快速傅里叶变换 (FFT) 和恒定虚警率 (CFAR)。
600MHz 完全可编程的数字信号处理器,可实现完全可定制的信号处理。
完全可编程的 200MHz Arm® Cortex®-R4F 微控制器,用于群集、跟踪和应用级代码。
除了裸片级集成之外,IWR6843 的型号 IWR6843AOP 还在封装上配有天线,可进一步实现集成并减小印刷电路板 (PCB) 面积,适用于空间受限型应用或射频信号的 PCB 布线具有挑战性的情况。
FMCW
FMCW 提供了十分简单的调制方案,可在测量距离时实现宽范围和高精度。FMCW 还提供径向尺寸(雷达与目标之间的线)的速度测量均值,可以是高速(如汽车速度),也可以是低速(如呼吸时胸部起伏速度)。此类细微动作的跟踪通常称为多普勒检测或微多普勒检测。
线性调频脉冲
线性调频脉冲描述了 FMCW 中使用的调制;瞬时频率 f(t) 随时间呈线性变化,因此这是一个线性调频脉冲。发送的线性调频脉冲和接收的线性调频脉冲之间的频率差与飞行时间(到达目标并返回的时间)成正比,因此与到目标的距离成正比。
方程式 1 将发送的波幅表示为:

其中 K 是发送频率以时间为单位增加的斜率(对于 IWR6843,该值可以是介于 0 MHz/µs 和 250MHz/µs 之间的任何值),AT 是信号发送的振幅(发送功率),f0 是在线性调频脉冲开始处发送的最低频率(57GHz 或 60GHz,具体取决于所选的 VCO)。
方程式 2 将接收的波幅表示为:

其中,对于 δ = (2 × d)/ v (是飞行时间的两倍),d 是到目标的距离,v 是光在介质中的传播速度。
混频器
混频器将发送信号和接收信号之间的频率差进行倍增(方程式 3):

按照三角函数的基本规则,混频器的输出是两个正弦之和:一个正弦的频率是 f_TX 和 f_RX 之差,另一个正弦是两者之和。
使混频器的输出通过低通滤波器可恢复 IF 信号,其频率是发送器和接收器之间的频率差。
方程式 4 将积化和差公式表示为:

混频器的输出通过低通滤波器会产生 IF,这是发送器和接收器之间的频率差(因此是一个与飞行时间成正比的量)。
方程式 5 是所得到的 IF 信号:

ADC 将信号数字化;请注意,信号的频率远低于线性调频脉冲的频率,因此很容易通过普通的 ADC。例如,IWR6843 中 ADC 的最大采样频率为 25MHz。
从方程式 5 中,您可以清楚地看到用于测量胸部运动的心率和呼吸频率的多普勒元素来自何处。
FFT 和峰值检测
一旦信号只携带相关信息(yIF 频率是飞行时间的镜像),信号将通过距离 FFT,然后执行 CFAR 算法或阈值化算法。图 2 所示为不同天线之间的飞行时间差。
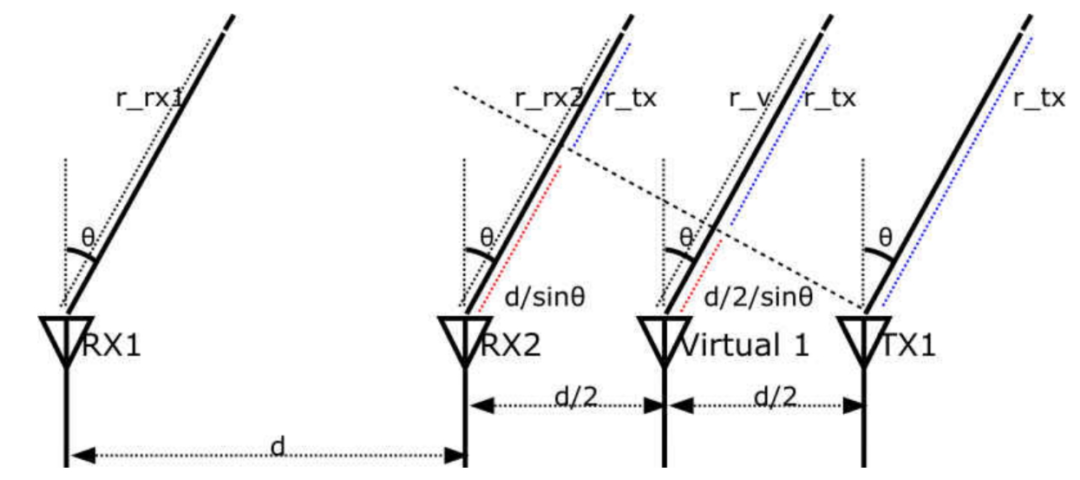
图 2. 每根接收天线的相位增加 MIMO 图示
概括而言,到达角是根据每根接收天线处测量的飞行时间差得出。在数学层面上,方程式 6 将每根天线的转向矢量定义为:
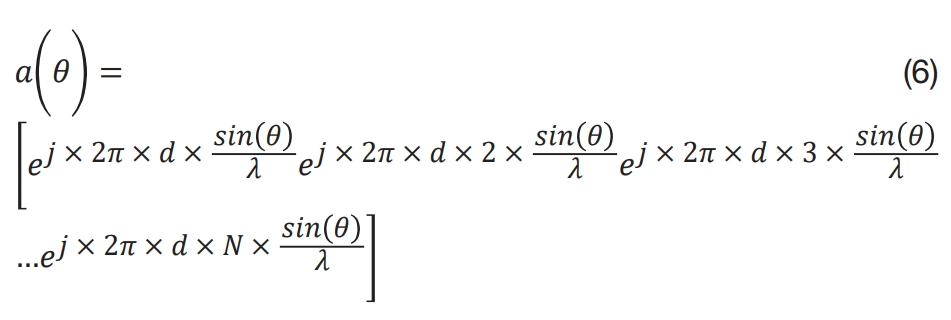
转向矢量用于在每根天线处组合来自每个目标的信号。方程式 7 表示通过所有天线从每个目标发出的所有信号之和,其中 xi 是第 i 根天线接收的信号:

方程式 8 对平均功耗的计算如下:

传统的接收波束形成(也称为 Bartlett 波束形成方法)是基于窄带阵列的较早的到达方向估算算法。该算法可更大程度地提高波束形成器相对于特定方向的输出功率,将方程式 9 中的最大化关系表示为:

为了计算每个 θ 的 P(a(θ)),公式 10 将 R 近似为:

其中 X 是信号矩阵(方程式 11):

从这些公式中,您可以看到 MIMO 雷达如何在三个维度上实现位置推导。
沿您想要检测的方向进行波束控制
使用雷达传感器捕获场景数据通常需要对天线波束宽度提供的整个视场的每一帧周期进行航向扫描。该航向扫描可以捕获相关和不相关物体的反射,您需要从扫描中提取和表述特定对象,或者在本例中,提取和表述需要测量生命体征的患者。确定患者位置后,可利用传输波束形成来聚焦波束,如前所述。
如果患者不在视轴处,则可以激活波束控制。该功能由每个发送器上步长为 5.625° 的 6 位可配置移相器实现,提供 64 种设置来覆盖 0° 至 360° 相移。移相器位于相应的功率放大器之前,并根据主波束的聚焦位置为每个发送通道分别进行编程,请参阅图 3。移相器通常是基于矢量调制器的模拟结构,该调制器使用数模转换器在信号放大之前对信号进行相移。
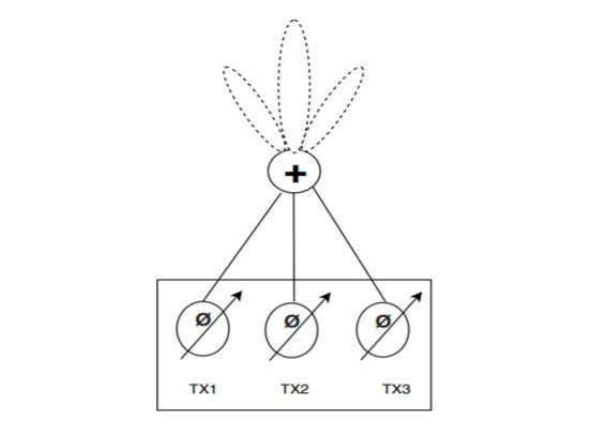
图3. 发送级中包含的移相器
当有多个受试者处于雷达传感器的不同方位角时,您可以实时对移相器进行编程,要么帧到帧(通常为 100ms 至 200ms),要么更低(使用子帧时)。例如,波束可以基于子帧以 20° 的步长在 -60° 至 +60° 的范围内进行扫描,全场景扫描持续时间不到 200ms,如图 4 所示。这有助于在一个房间内全方位检测多个受试者的生命体征,这些受试者的角度各不相同,并由发送波束依次照亮。
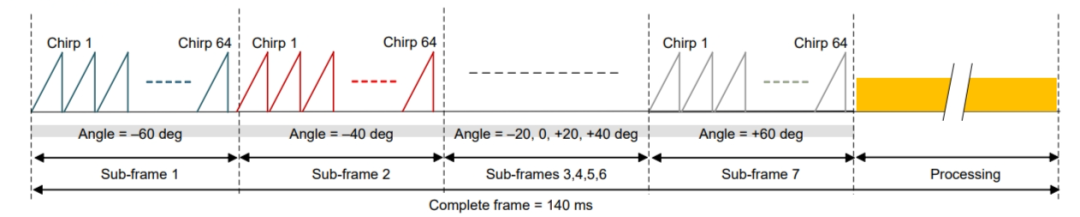
图 4. 将每个子帧的波束转向角更改 20°
Calibration
为了在电压和温度变化时维持性能,TI 毫米波雷达器件支持射频初始化阶段(调用 RfInit() 应用编程接口)以及运行时(在应用执行期间)的启动时间校准。图 5 显示了校准类型的示例排序,可能包括以下类型:
模拟锁相环校准。
合成器 VCO。
局部振荡分布校准。
ADC 直流失调电压。
IF 放大器高通和低通截止频率。
峰值检测器。
发送和接收增益。
静态电流失配。
发送移相器。
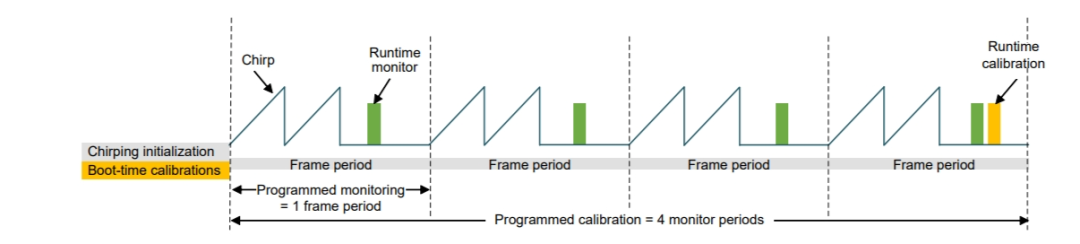
图 5. 功能线性调频脉冲、监测和校准的时序
图 6 说明了射频前端中的一些集成,用于校准发送和接收模拟前端参数。连同 PA 输出和 LNA 输入的功率检测器,结合环回路径,可以持续监测和补偿整个前端。
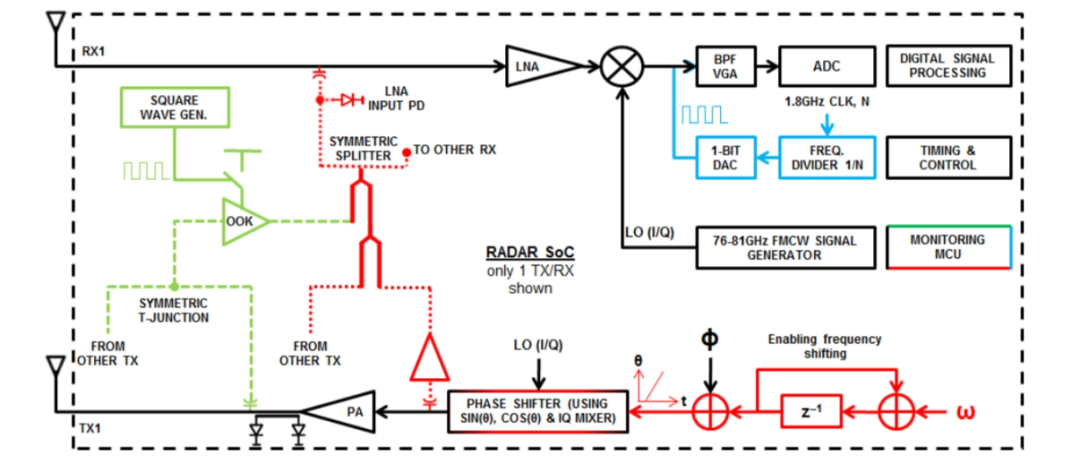
图 6. IWR6843 的诊断和监测功能概述
结论
TI 毫米波器件包含 FMCW 雷达所需的高度集成功能,只需一个外部 40MHz 晶体,即可为整个前端计时。此类产品可在三个维度上检测精细的微多普勒运动,包括检测人类的呼吸和心率。
将多个 TX 链与移相器进一步集成可实现发送波束形成和波束控制,从而在更小的视场中实现 SNR 改进,同时保持 MIMO 运行以进行 3D 传感。
最后,所有模拟元件的监测和校准集成可在器件的整个生命周期内实现一致的性能。这种级别的模拟集成使多患者非接触式生命体征传感器能够居家使用。



点击阅读原文
即刻阅读《模拟设计期刊》电子版,更多相关知识等待解锁!
