

有人说,20世纪是电的世纪,21世纪是光的世纪;知光解电,再小的个体都可以被赋能。追光逐电,光赢未来...欢迎来到今日光电!

----追光逐电 光赢未来----
SLAM系统构成
SLAM系统一般分为五个模块,包括传感器数据、视觉里程计、后端、建图及回环检测。
传感器数据:主要用于采集实际环境中的各类型原始数据。包括激光扫描数据、视频图像数据、点云数据等。
视觉里程计:主要用于不同时刻间移动目标相对位置的估算。包括特征匹配、直接配准等算法的应用。
后端:主要用于优化视觉里程计带来的累计误差。包括滤波器、图优化等算法应用。
建图:用于三维地图构建。
回环检测:主要用于空间累积误差消除
SLAM上的传感器主要分为这两类,一种是基于激光雷达的激光SLAM(Lidar SLAM)和基于视觉的VSLAM(Visual SLAM)。
1、激光SLAM
激光SLAM采用2D或3D激光雷达(也叫单线或多线激光雷达),2D激光雷达一般用于室内机器人上(如扫地机器人),而3D激光雷达一般使用于无人驾驶领域。激光雷达的出现和普及使得测量更快更准,信息更丰富。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
激光雷达测距比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。
2、视觉SLAM
视觉SLAM从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力。早期的视觉SLAM基于滤波理论,其非线性的误差模型和巨大的计算量成为了它实用落地的障碍。近年来,随着具有稀疏性的非线性优化理论(Bundle Adjustment)以及相机技术、计算性能的进步,实时运行的视觉SLAM已经不再是梦想。
视觉SLAM的优点是它所利用的丰富纹理信息。例如两块尺寸相同内容却不同的广告牌,基于点云的激光SLAM算法无法区别他们,而视觉则可以轻易分辨。这带来了重定位、场景分类上无可比拟的巨大优势。同时,视觉信息可以较为容易的被用来跟踪和预测场景中的动态目标,如行人、车辆等,对于在复杂动态场景中的应用这是至关重要的。
通过对比发现,激光SLAM和视觉SLAM各擅胜场,单独使用都有其局限性,而融合使用则可能具有巨大的取长补短的潜力。例如,视觉在纹理丰富的动态环境中稳定工作,并能为激光SLAM提供非常准确的点云匹配,而激光雷达提供的精确方向和距离信息在正确匹配的点云上会发挥更大的威力。而在光照严重不足或纹理缺失的环境中,激光SLAM的定位工作使得视觉可以借助不多的信息进行场景记录。
国内SLAM发展现状
激光SLAM比视觉SLAM起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机,比如 Kinect;还有一种就是基于单目、双目或者鱼眼摄像头的。VSLAM 目前尚处于进一步研发和应用场景拓展、产品逐渐落地阶段。

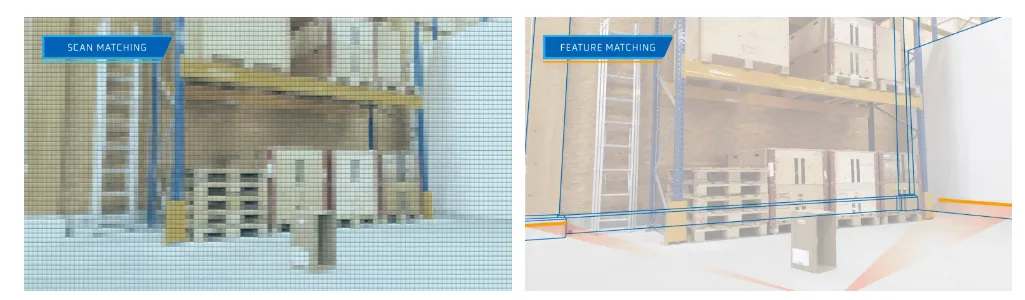
自然导航技术实现方法有两种:扫描匹配(有时称为 SLAM 导航)和特征匹配(由 ANT应用)。
借助扫描匹配技术,来自车辆激光扫描仪的测量结果与基于网格的环境参考地图单元格进行比较(匹配)。这些单元格就类似数字图像中的像素。
为了在地图中定位(定位)自身,导航系统会使用匹配点来计算车辆位置。同时,它会使用测程法,通过计算车辆动作来测量车辆位置变化。在极少数情况下,扫描匹配系统会使用车辆“看到”的内容定期更新参考地图。

扫描匹配技术将环境的许多不同部分与参考地图进行匹配。特征匹配技术则将环境中的一些永久性特征与参考地图进行匹配。
借助 ANT 特征匹配技术,将车辆激光扫描仪的测量结果与墙壁和柱子等永久地图参考(特征)进行比对(匹配)。如果站点的部分空间不具备足够特征,也可以添加反光贴纸以提供额外参考。
选择匹配特征而不是激光点的重要优势之一是:是由于每个特征的特定大小和角度,使得特征具有高度独特性。因此,它们很容易让系统识别并成功匹配。
为了在地图中定位车辆,ANT接着会使用测程法和特征匹配的组合,从计算中排除所有非永久性的“动态”对象(例如:托盘、箱子、人等)。
由于生成的地图仅包含静态和永久特征的坐标,因此与扫描匹配使用基于网格的地图相比,文件容量相对缩小很多。
如果把使用扫描匹配导航的车辆参考(网格)地图比作由像素组成的数字图像,那么使用特征匹配导航的车辆参考地图则类似于线条图。
使用特征匹配和使用扫描匹配技术的车辆都需要“看到”并匹配环境中的特征,以精确定位自己的位置。
但是它们需要匹配的环境特征比例差异巨大:
扫描匹配技术需要识别至少 60% 的环境才能准确定位。
特征匹配技术仅需识别5% 或更少的环境特征即可精确定位。事实上,即使在几秒钟内没有匹配任何特征,由于使用测程法,ANT驱动的车辆也可以有效地导航几米。

为什么差异如此巨大?我们可以用一句老话来回答:见木不见林。AGV 不太可能发现自己身处于森林中,如果有需要,扫描匹配车辆将扫描并绘制每片沙沙作响的树叶和经过的鹿。这种方式生成的地图是密集且详细的,并且几乎不可能在下一个任务中匹配(因为森林中大多数事物都会略有不同)。相比之下,特征匹配车辆将忽略其他一切,只匹配森林中唯一不移动的物体(树干)来生成地图。
因此,ANT驱动的车辆只需识别一小部分环境特征即可有效导航。
AGV 导航扫描仪的位置?
大多数特征匹配(ANT 驱动)车辆不需使用专用激光扫描仪进行导航,而是依靠位于车辆底部的内置安全激光扫描仪。
但是,特征匹配的车辆仍然可以检测到意外物体,比如一堆新的托盘,并依靠其安全系统避免碰撞发生。但是,如上所述,这些动态物体不会被添加到车辆地图中。
然而,使用扫描匹配的车辆通常需要配备额外的激光扫描仪。它通常位于车辆的顶部,以确保尽可能与环境中的更多点进行匹配。
额外扫描仪会为车辆制造商增加额外的组件成本(对于车辆购买者来说,最终价格将会更高)。
每增加一个硬件,就会增加一个潜在的故障点。
在车辆顶部安装激光扫描仪会限制生产商可以向市场提供的车辆类型。例如 :如何安装此额外的激光扫描仪对于潜伏式AGV是一个巨大设计挑战。
安装于车辆顶部的激光扫描仪对于不平整表面或软轮胎引起的倾斜或偏航情况更加敏感。

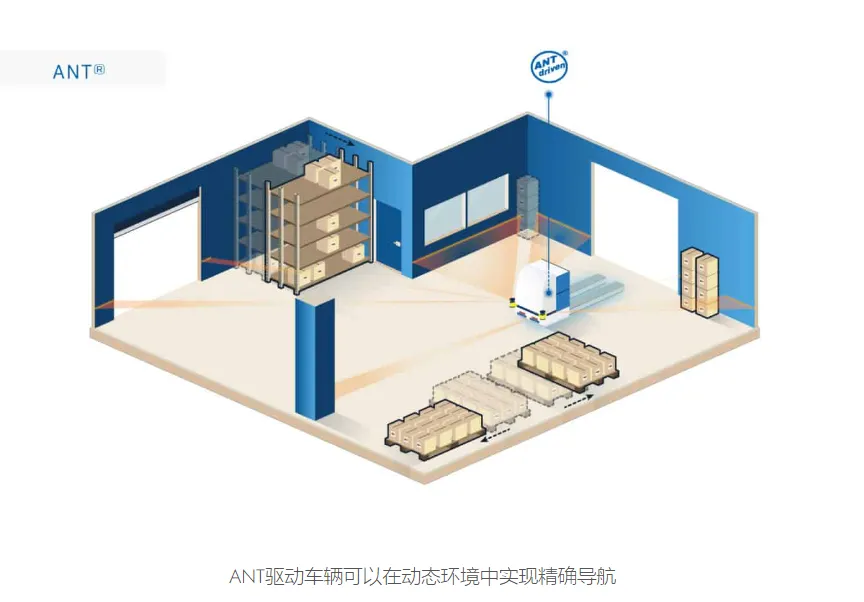
使用自然导航时确保 AGV 操作的可重复性和可靠性并不容易。然而,事实证明,使用ANT驱动可以实现这两点,而且不会影响精确度(约 ±1 cm / ±1°)。
扫描匹配的车辆定位精确度与其参考地图的单元格大小相当。为了减少文件大小,使用扫描匹配的车辆通常会降级地图,创建三到十厘米的单元格大小。ANT驱动车辆并没有这方面的限制,因为参考地图仅包含永久特征,文件较小且无需降级。
此外,由于扫描匹配涵盖整个环境寻找匹配,它也会捕获可以移动的动态对象。例如:托盘可能会定期放置在装货码头的某个位置。如果它们始终放置在完全相同的位置且精确度为厘米,这样不会造成任何问题,但实际上这种情况很少。因此,如果这些托盘的放置位置偏离了几厘米,但车辆可能会认为它们在正确的位置,并相应地调整地图的其余部分,将地图锚定到错误位置,这样一来其他点都会变得不准确。
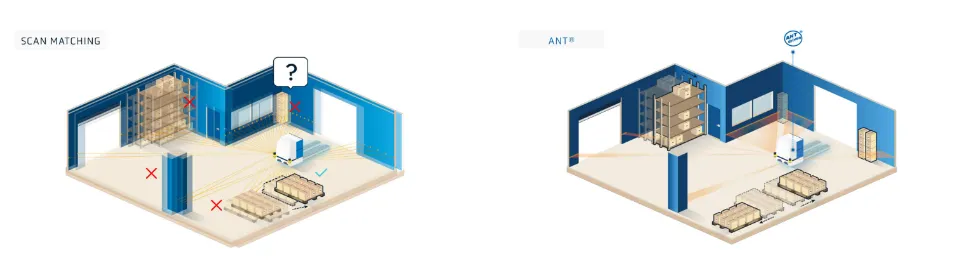
如果物体被放置在距离其预期位置几厘米的地方,这可能会影响使用扫描匹配技术的车辆的定位精度。由于 ANT驱动的车辆会忽略不是环境永久组成部分的物体,因此它们不易受此问题的影响
如果使用扫描匹配导航的车辆使用本质上不精确的读数更新参考地图,则任何错误都将上传到系统的车辆管理服务器,并将更新后的地图下载到车队的其余部分,这可能会扩大误差并导致错误更严重。
在同一示例中,ANT驱动的车辆根本不会记录托盘的位置。车辆会忽略这些托盘位置,除非输入指示需与它们进行交互。
出于定位目的,ANT驱动的车辆被编程为忽略环境中与地图中的静态特征不对应(匹配) 的物体。这种情况如同在高速公路上驾驶汽车:高速公路之外的物体(例如:房屋和树木)可以被忽略。但是,如果一个物体出现在车辆的路径上会发生什么情况?会不会发生碰撞?
答案是不会。如上所述,ANT驱动车辆的激光扫描仪可监控环境并检测意外(动态)物体。一旦侦测到这些时,ANT会停止车辆(虚拟路径跟随模式)或绕开这些物体(避障模式)。当然,作为后备方案,车辆安全系统也可以在必要时进行紧急停车。


申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


