特斯拉作为全球智能驾驶领域的技术先锋,其FSD(Full Self-Driving)方案选择了独特的纯视觉自动驾驶路线,摒弃了激光雷达和高精度地图的使用。特斯拉通过其自研的摄像头感知方案及数据驱动的神经网络,在自动驾驶领域取得了巨大进展。然而,纯视觉方案在极端天气及某些复杂场景下表现的局限性,依然是亟需解决的问题。
特斯拉在自动驾驶领域的技术路线具有高度独特性。不同于大多数车企采用的多传感器融合方案,特斯拉选择了纯视觉感知的技术路径,这意味着特斯拉的车辆完全依赖摄像头进行环境感知,而摒弃了常见的激光雷达和高精度地图。这一决定源于特斯拉创始人埃隆·马斯克的长期信念:认为摄像头的视觉感知和数据处理能力足以替代激光雷达和其他传感器,进而实现车辆自动驾驶。这一设计思路的基础在于对人类视觉系统的模仿。人类驾驶员依靠眼睛和大脑对环境的感知与决策,特斯拉的纯视觉方案试图通过摄像头和神经网络模拟这一过程。具体来说,特斯拉的车辆配备了8个摄像头,这些摄像头负责全方位监测车辆周围的环境,并通过神经网络生成三维环境模型。这些摄像头分别覆盖车辆的前方、后方及左右两侧,并通过协作实时收集环境数据,为自动驾驶决策提供支持。与激光雷达依赖反射激光来构建三维环境不同,特斯拉的摄像头通过图像处理技术生成3D场景,这种方法极大简化了传感器融合的复杂性,同时降低了硬件成本。FSD系统的另一个核心竞争力在于其强大的数据驱动能力。特斯拉在全球范围内拥有庞大的用户基础,这为其积累了大量的驾驶数据。自2020年FSD Beta版本在北美推出以来,特斯拉通过大量真实驾驶场景中的数据不断优化其神经网络模型。相比传统的规则驱动型自动驾驶系统,特斯拉采用了端到端的神经网络架构,通过大量数据训练模型来代替复杂的规则编写,极大地提升了自动驾驶系统在复杂场景下的适应能力。特斯拉在感知层提出了“BEV+Transformer+Occupancy Network”的算法框架。通过这种框架,车辆可以以类似人类大脑的方式处理复杂环境中的信息。例如,FSD系统通过摄像头收集图像数据,识别车辆、行人、道路标志等元素,并使用深度学习算法构建出周围的三维场景。随后,系统在神经网络中进行处理,生成驾驶决策并执行。这种数据驱动的模型在面对不断变化的环境时能够更加灵活,且随着数据量的增加,系统的性能和可靠性也会逐步提升。特斯拉FSD算法的演进是一个从规则驱动向数据驱动转变的过程。早期的自动驾驶系统依赖于大量的规则编写和手工标注来实现感知和决策,但这种方法的局限性在于无法有效应对复杂多变的道路场景。特斯拉从2016年开始自研算法,通过不断迭代,逐步引入更加先进的神经网络架构。2019年,特斯拉在其算法中引入了“BEV+Transformer”架构,通过将车辆周围的2D图像数据转化为鸟瞰图视角(BEV),并结合Transformer技术提升图像升维处理的能力。这一架构使得特斯拉FSD能够更好地处理复杂环境中的物体识别和行为预测,尤其在处理车辆交互、动态障碍物等场景时,表现出色。2024年,特斯拉推出了FSD V12版本,这一版本标志着全球首个端到端神经网络量产上车。这意味着从数据输入到决策输出的整个过程都由神经网络完成,彻底摆脱了传统的模块化算法架构。特斯拉通过这一革新,实现了从繁琐的规则编写到高效的数据驱动的转变,使得系统在处理复杂场景时更加灵活和准确。
特斯拉的自动驾驶硬件平台经历了多次迭代升级,从2014年的HW1.0,特斯拉在每一代硬件的升级中,都显著提升了计算能力、摄像头的数量和系统的感知能力。这种硬件迭代与特斯拉的软件发展同步进行,推动了FSD系统的不断成熟。• HW1.0阶段(2014年):特斯拉最初的自动驾驶硬件平台基于Mobileye的EyeQ3芯片,主要功能是提供基础的自动驾驶辅助功能,包括自动巡航和车道保持。HW1.0仅配备了1个前置摄像头和毫米波雷达,感知能力非常有限,主要依靠传统的规则驱动型算法处理环境数据。这一版本并不具备完全自动驾驶的能力,更多是辅助驾驶。• HW2.0阶段(2016年):HW2.0的发布标志着特斯拉自动驾驶硬件迈入了一个全新的阶段。特斯拉在这一阶段引入了NVIDIA DRIVE PX2计算平台,支持更强大的数据处理和计算能力。车辆配备了8个摄像头,包括前置、后置及侧向摄像头,覆盖车辆周围的所有方向。毫米波雷达仍然保留,用于提供额外的深度感知支持。这一版本的硬件升级,使得特斯拉的车辆能够处理更加复杂的自动驾驶任务,如自动变道和自动泊车。• HW3.0阶段(2019年):特斯拉在HW3.0阶段推出了自研FSD芯片,彻底摆脱了对NVIDIA芯片的依赖。FSD芯片具备每秒2300帧的图像处理能力,大幅提升了系统的计算能力。HW3.0配备了8个摄像头和12个超声波雷达,确保车辆可以全方位监测周围环境,同时提高了感知的精确度。得益于自研芯片,特斯拉能够更加灵活地在硬件上部署其神经网络算法,使得FSD系统能够在硬件上实现高度优化。• HW4.0阶段(2023年):HW4.0是特斯拉最新的自动驾驶硬件版本,这一版本延续了纯视觉方案的核心理念,同时进一步增强了摄像头的感知能力。HW4.0配备了12个摄像头,像素从120万提升至500万,摄像头的探测距离达到424米。此外,特斯拉重新引入了高精度4D毫米波雷达,以弥补纯视觉方案在极端天气或复杂光照条件下的局限性。HW4.0的处理器也得到了大幅升级,CPU内核从12个增加至20个,使得系统具备更强的计算能力,能够应对更加复杂的驾驶场景。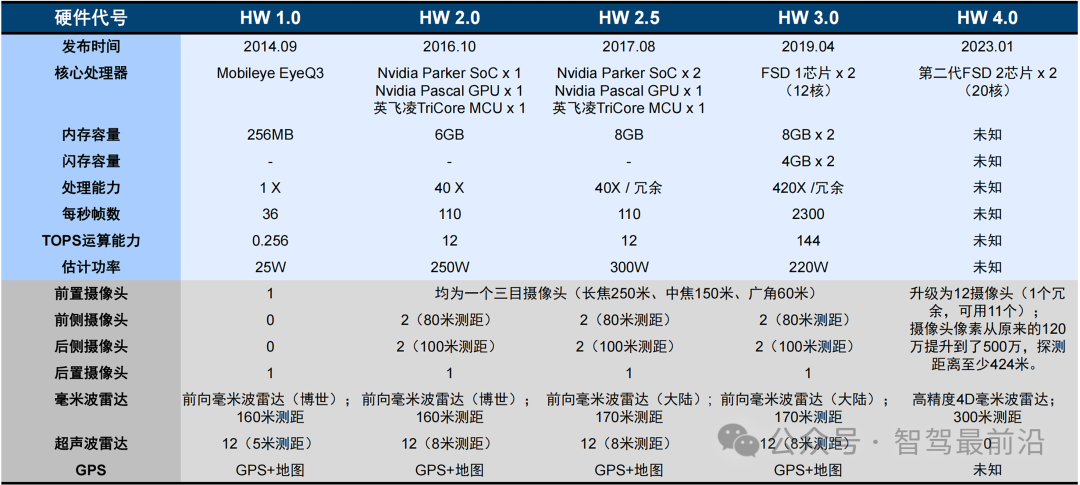
2.2 硬件优化的策略:以摄像头为核心,减少冗余传感器在硬件架构的演进过程中,特斯拉采取了一种独特的“减法”策略,即逐步减少对其他冗余传感器的依赖,最终完全依赖摄像头来完成自动驾驶的环境感知任务。特斯拉在HW3.0阶段曾分批移除不同车型装配的毫米波雷达,认为摄像头加上数据驱动的算法足以应对大多数驾驶场景。然而,随着技术发展和用户反馈,特斯拉在HW4.0阶段重新引入了4D毫米波雷达,尤其是在恶劣天气下提升系统的感知能力。相比于激光雷达等高成本的传感器,摄像头的成本更低,且更容易与现有的神经网络算法结合。激光雷达的高精度固然能够提供更丰富的环境感知数据,但其价格昂贵,动辄数千美元的硬件成本使得激光雷达不适合大规模量产车型。而摄像头的成本则大大低于激光雷达。例如,HW4.0中12颗摄像头的硬件成本约为3600元人民币,4D毫米波雷达的成本在500-600元之间,相比于激光雷达的高成本,特斯拉的纯视觉方案在大幅降低成本的同时,仍然能够提供足够的环境感知能力。特斯拉这种“减法”策略的成功与其强大的算法密切相关。通过对摄像头采集的数据进行深度处理,特斯拉的神经网络能够实现对环境的精准理解,并作出相应的驾驶决策。这种纯视觉方案不仅降低了硬件成本,还简化了系统的复杂性,使得FSD具备更高的市场竞争力。自从HW3.0开始,特斯拉开始研发自有的FSD芯片。这一举措为特斯拉带来了显著的竞争优势。相比于依赖外部供应商的芯片,特斯拉自研的FSD芯片能够更好地与其算法进行适配,并在处理性能上进行专门的优化。这使得特斯拉的硬件架构不仅在计算能力上更加出色,还在成本控制上拥有更强的优势。自研芯片的一个重要优势在于它为特斯拉的硬件开发带来了更高的灵活性。特斯拉可以根据其自动驾驶系统的具体需求,灵活调整芯片的设计和功能。这种灵活性不仅使得硬件能够更加高效地运行特斯拉的神经网络算法,还大大提高了系统的性价比。此外,随着特斯拉在自动驾驶领域积累越来越多的数据,自研硬件的价值将进一步凸显,因为特斯拉可以在芯片层面上对算法和硬件进行同步优化,进而提升FSD的整体性能。
特斯拉FSD的一个显著特点是其高度拟人化的驾驶决策。这一特性在最新的FSD V12版本中得到了进一步提升。FSD系统通过大量的道路行驶数据学习人类驾驶员的行为,并在复杂驾驶场景下模仿人类驾驶员的决策方式。与之前的版本相比,FSD V12在速度控制、转向平滑度以及对突发情况的应对方面,都更加接近人类驾驶员。例如,FSD V12在红绿灯启停、转向和变道过程中,能够做到更加平稳的驾驶,极大地减少了乘客在这些操作中的顿挫感。同时,系统在遇到前方缓慢行驶的车辆时,能够迅速判断是否变道超车,并采取合理的速度进行变道。特斯拉通过深度学习和端到端的神经网络训练,使得FSD在复杂道路场景中的决策能力得到了显著提升。此外,FSD系统在处理与其他交通参与者的互动时也表现出色。比如,系统在面对行人横穿马路时,能够迅速减速并留出足够的安全距离,随后在行人通过后继续加速前进。这种类似人类驾驶员的反应,使得FSD的驾驶表现更加拟人化,提升了乘客的乘坐体验。特斯拉FSD在安全性方面的表现尤为突出。根据特斯拉发布的安全数据,FSD在开启后的行车安全性显著高于传统驾驶模式。特斯拉的数据显示,在开启FSD功能的情况下,每行驶539万英里才可能发生一起事故,而全美平均水平是每行驶67万英里发生一起事故。这表明FSD系统能够显著减少驾驶过程中的潜在风险,提高行车安全性。此外,FSD系统的可靠性也在不断提升。特斯拉的最新版本FSD V12在城市环境中的无接管行驶里程已经达到622公里,较之前的版本大幅提升。这意味着,在大多数日常驾驶场景中,车辆可以依靠FSD系统自主完成驾驶任务,而无需驾驶员频繁干预。这一进展显示出特斯拉自动驾驶技术在城市道路环境中的适应性和可靠性正在逐步提高。尽管特斯拉的纯视觉方案在多数场景下表现优异,但在一些极端天气或光线条件较差的情况下,摄像头的表现仍存在一定的局限性。例如,在夜间驾驶或大雾天气下,摄像头的感知能力会受到限制,导致系统无法准确判断环境中的物体。这种局限性是特斯拉重新引入毫米波雷达的原因之一,尤其是在HW4.0阶段,特斯拉通过高精度4D毫米波雷达弥补了摄像头在这些场景下的不足。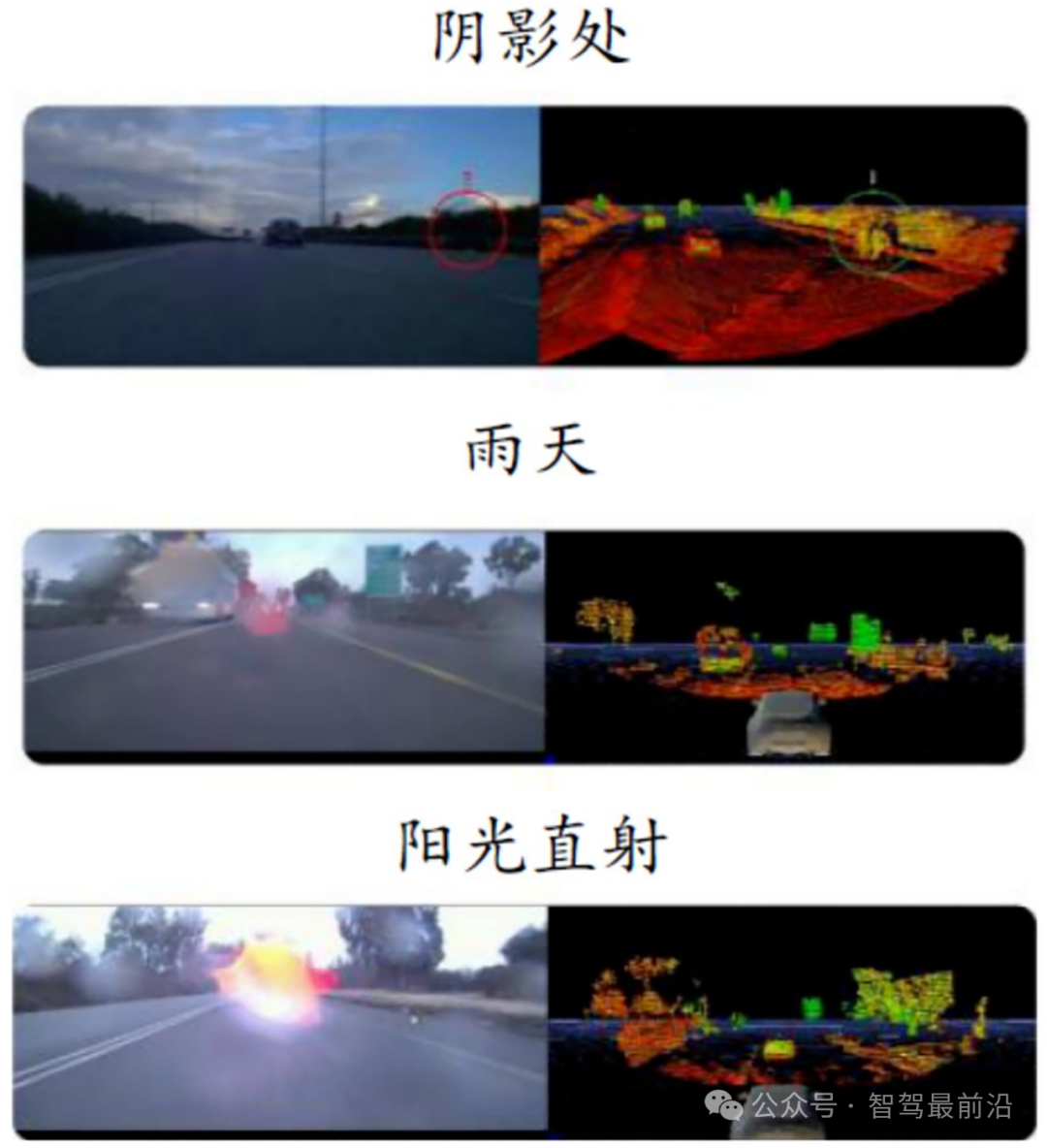
此外,特斯拉FSD在面对某些长尾场景(例如非常规或极端驾驶情况)时,系统仍可能出现误判。例如,在遇到特殊形状或装载过多物品的车辆时,FSD系统可能无法准确识别这些车辆的形状,进而导致错误的驾驶决策。这些长尾场景虽然在实际驾驶中并不常见,但如果不能有效应对,仍可能对驾驶安全性产生影响。
中国作为全球最大的新能源汽车市场,对于特斯拉FSD而言,是一个至关重要的战略市场。特斯拉自进入中国以来,通过其高性能的电动车和先进的自动驾驶技术,赢得了大量消费者的青睐。数据显示,截止2023年底,特斯拉在中国市场的累计销量已经超过170万辆,这为FSD的推广奠定了广泛的用户基础。然而,特斯拉在中国市场推广FSD也面临一些独特的挑战。首先,中国的监管环境相对复杂,特别是在高精度地图和数据安全方面,中国政府对自动驾驶技术的要求非常严格。特斯拉需要与中国的本土企业合作,确保其自动驾驶系统符合中国的法规要求。为此,特斯拉已经与百度合作,获得了车道级的导航地图,以支持其FSD在中国的落地。此外,特斯拉计划在中国建立本地的数据中心,确保所有车辆数据能够在中国境内进行存储和处理,以符合中国的数据安全政策。尽管面临挑战,特斯拉在中国市场的前景依然十分广阔。假设FSD在中国市场的渗透率达到5%,特斯拉将在中国市场新增54.4亿元的收入。特斯拉通过广泛的用户基础和不断优化的自动驾驶技术,有望在中国市场实现可观的增长。为了加速FSD在中国市场的推广,特斯拉已经推出了EAP(增强版自动驾驶)的订阅服务,用户可以按月或按季度支付费用使用部分高级自动驾驶功能。这一灵活的订阅模式不仅增加了现有用户对自动驾驶功能的接受度,还为未来FSD在中国市场的全面推广奠定了基础。
未来,特斯拉将继续深化其纯视觉技术路线,同时通过硬件和软件的持续优化,进一步提升FSD系统的性能。特斯拉在算法层面将继续推进端到端神经网络的应用,减少对传统规则编写的依赖。随着数据量的增加,FSD系统将逐步在更复杂的驾驶场景中实现拟人化决策,最终实现全场景自动驾驶。在硬件方面,特斯拉可能会继续优化其摄像头和雷达的组合,通过提升摄像头的分辨率和感知范围,以及引入更多的高精度传感器,进一步提升系统在极端场景中的表现能力。同时,特斯拉的自研芯片将继续在硬件层面上为FSD的算法提供强大的计算能力支持,确保系统能够实时处理大量数据并作出精确决策。虽然特斯拉在全球范围内的自动驾驶技术处于领先地位,但其面临的市场竞争压力正在不断加大。国内外的汽车制造商和科技公司都在积极布局自动驾驶技术。例如,国内的蔚来、小鹏和理想等新兴车企已经在智能驾驶领域取得了显著进展,并在某些场景下与特斯拉展开了激烈竞争。在中国市场,特斯拉需要面对本土车企的强劲竞争,同时还需要适应中国市场的独特法规要求。为了保持竞争优势,特斯拉需要在技术上不断创新,同时通过本地化的战略适应中国市场的需求。此外,特斯拉还需加速自动驾驶技术的商业化进程,例如推出机器人出租车服务等新业务,以应对市场的多元化需求。
特斯拉FSD方案通过其独特的纯视觉技术路线、数据驱动的端到端神经网络,以及自研硬件的优势,奠定了其在全球自动驾驶领域的领先地位。尽管其技术在许多方面表现出色,但在面对复杂的市场需求和严苛的监管环境时,特斯拉仍需继续优化其系统性能,以确保在未来的市场竞争中继续保持领先。同时,随着全球自动驾驶技术的快速发展,特斯拉能否在中国等重要市场顺利推广其FSD技术,将是决定其未来市场地位的重要因素。
「智驾最前沿」微信公众号后台回复:C-0470,获取:特斯拉智能驾驶方案简剖 pdf下载方式。
-- END --



