




浅述纯电动汽车VCU
核心策略之扭矩控制
●前言●
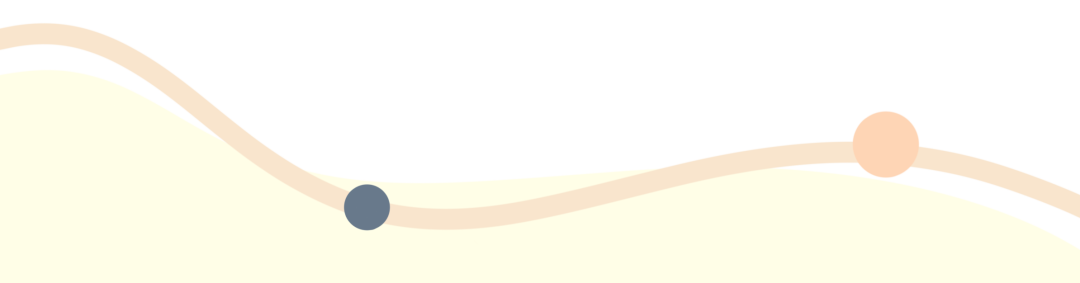
纯电动汽车的整车控制器(VCU)是整车控制系统的核心单元,它就像整车的大脑一样,能够采集输入信号,负责上下电管理、扭矩管理,协调各个控制系统工作,并且提供监控、检测功能,为整车的正常运行提供完善的控制逻辑。VCU要跟整车上其他的控制器建立通信,实时获取其他控制器的运行状态,并发送控制指令,所以VCU起到整体协调作用,对于提高整车驾驶性、能源效率和安全可靠性发挥出主控作用。VCU与整车其它控制器之间的联系见图1。
扭矩控制是电动汽车动力系统控制策略的重要部分,因为电动汽车的能量分配都是基于功率和扭矩计算的,整车的动力性和驾驶性也是取决于VCU对可用扭矩的控制,所以扭矩控制贯穿于整个动力系统的控制过程。
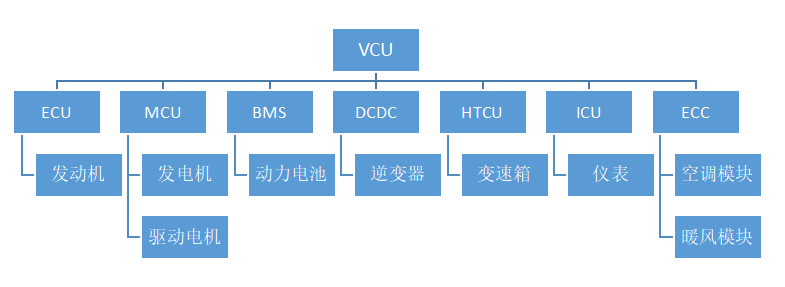
图1 新能源汽车控制器架构
为了方便了解电动汽车的运行逻辑,我们可以通过能量流动过程,也就是从电池到轮端,以及从轮端到电池,研究能量的传递方式。将电动汽车的能耗做一下分解,见图2,电池电能的消耗大致可以分两部分:车辆附件和驱动电机。车辆附件的耗能主要包括整车低压系统用电器、电力电子逆变装置以及空调、转向、PTO等高压设备的电能需求,驱动电机的能量主要以输出扭矩的形式满足车辆行驶需求。下面内容将主要介绍基于整车驾驶需求的VCU扭矩控制策略,扭矩控制模块主要涉及到加速踏板解析、单踏板控制、蠕行扭矩控制、驻坡扭矩控制、制动能量回收控制、定速巡航控制和限速控制等。
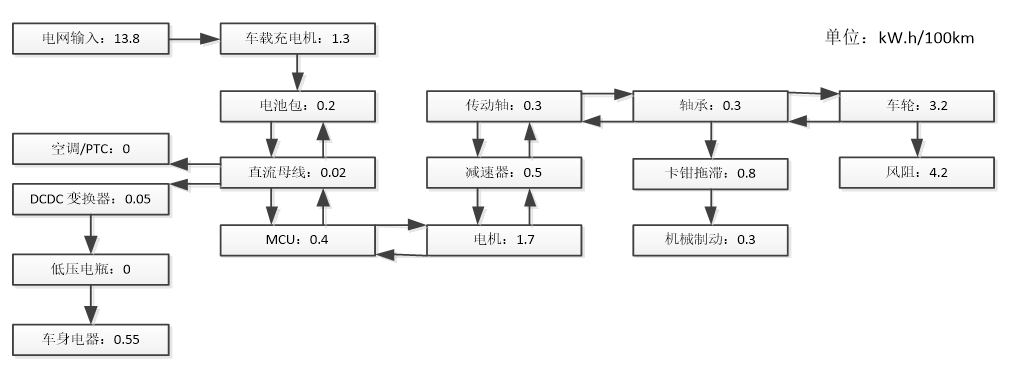
图2 某电动汽车的能量流
●加速踏板扭矩解析●
驾驶员的驾驶意图是通过加速踏板、制动踏板和换挡器表达出来的,加速踏板解析即VCU采集加速踏板模拟量信号(电压信号),经过信号处理发送出来的踏板开度值、有效性和故障诊断。加速踏板的位置开度与电压值具有对应关系,可以通过标定设置进行定义,这里涉及到零部件特性曲线(见图3)的导入,最终输出加速踏板百分比与电压信号的对应关系。
图3 加速踏板特性曲线
真正能影响加速踏板与需求扭矩对应关系的是PedalMAP,有若干个3D表格组成,比如D档对应的Sport模式和ECO模式就有不同的PedalMAP表示,另外还有R档。PedalMAP是通过加速踏板开度和车速去对应需求扭矩,所以PedalMAP是基于Torque_Req=f(acc pedal, vehicle speed)的原理来调节电机扭矩以满足驾驶员的驾驶需求。
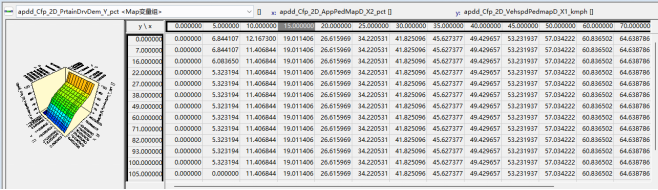
图4 PedalMAP标定及3D曲线
●单踏板扭矩控制●
由于电动汽车上的驱动电机可以提供正扭矩和负扭矩,所以可以通过PedalMAP设定使得加速踏板在不同开度的时候可以让电机提供正扭矩和负扭矩,即驱动力和制动力,单踏板模式就是在新能源汽车上将加速和制动用一个踏板实现的创新应用。单踏板模式是车辆通过调整动能回收的强度来营造出“松开加速踏板就减速、踩下加速踏板就加速”的驾驶模式。
图5 单踏板控制原理
从PedalMAP标定就可以判断出VCU是否采用了单踏板策略,如果PedalMAP中的值都是正值就是非单踏板控制策略,如果在加速踏板开度较小时对应的扭矩值是负值就是单踏板控制策略。
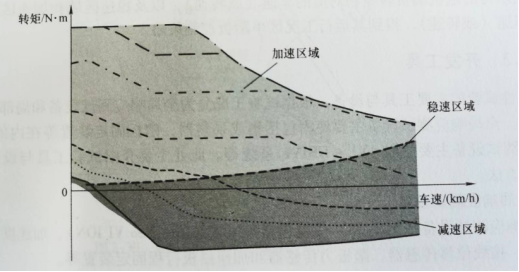
图6 单踏板策略对应PedalMAP
●蠕行扭矩控制●
整车Ready、车辆在D挡或R挡、加速踏板和制动踏板均为0时(踏板释放状态)、手刹松开,车辆处于起步或者行车即为蠕行状态,也有的将蠕行叫做怠速运行状态。如果蠕行状态使能,VCU则按照蠕行需求扭矩进行控制,否则按照加速踏板需求扭矩控制。车辆蠕行是比较常用的功能,有D档蠕行和R档蠕行,蠕行车速一般不超过10km/h。在蠕行过程中,VCU发出转矩指令(推荐采用转速PI控制模式),转矩随车速的增加而平滑减小,最终达到一个稳定转矩。
蠕行控制有两种策略,基于转速控制和基于扭矩控制,两种方式在不同的VCU策略上均有采用。基于转速的PI控制是根据实际车速与目标车速之间的差值进行PI控制的,转速差越大肯定P项和I项也越大,当进入PI转速死区(Deadband)后P项或I 项不再参与控制。基于扭矩的控制则是根据车速查表(2D表)获得扭矩需求,结合一些修正参数计算出目标扭矩发指令给电机控制器(MCU),电机转速提升车辆蠕行速度增加,随着车速增加目标扭矩降低。实际上,转速模式和扭矩模式可以配合使用,这样控制效果会更好。
●驻坡控制功能●
传统汽车的驻坡功能需要通过ESC模块的HHC、AVH等功能实现,而新能源汽车上防溜坡功能叫做ARS,是通过电机堵转扭矩控制使车辆稳定在坡道上。
当车辆挂入D档或R档,车速较小,电机蠕行扭矩不足以克服车辆在坡道上重力分量作用下反向下行(D档后溜、R档前行)时,整车将激活防溜坡功能,控制电机进入零转速控制,将车稳定在坡道上。当驾驶员踩下油门踏板后,驱动扭矩足以克服坡道阻力时,驻坡功能将彻底退出,车辆平滑切入驱动模式。由于整车驱动电机能力很强,克服坡道的堵转电流相对电机的正常工作电流来说很小,所以驻坡功能在一般坡道上能长时间保持。对于新能源车来说,不需要其他的零部件,仅仅依靠电机本身就能实现防溜坡功能,所以新能源汽车均开发此功能。
●能量回收控制●
能量回收有两种情况,分别是制动能量回收和滑行能量回收,对应的是不同的控制策略。制动能量回收因涉及到驱动轮与从动轮之间的制动力分配问题,所以考虑的因素很多,比如ECE制动法规上的M线,制动力理想分配的I线等,以及电液制动分配策略等问题,不同的控制策略对制动效能和能量回收效率会有不同,协调式制动力分配策略可以实现更高制动能量回收率。滑行能量回收对应的制动强度不大,仅通过电机的反拖发电实现制动力,不涉及到机械制动部分,有的车辆需要对滑行制动等级进行定义,总之,滑行能量回收控制起来相对简单。
对于新能源汽车,能量回收对于整车能耗的贡献是不容忽视的,有数据显示,汽车在存在较频繁的制动和启动的城市工况运行条件下,制动过程耗散的能量占直接驱动汽车能量的40%~50%,制动能量回收系统可使电动汽车大约可降低15%的能量消耗,续驶里程提高10%~30%,制动能量回收系统可使插电式混合动力汽车油耗降低15%~20%。
滑行过程的能量回收跟减速感体验强相关,过强和过弱的减速感都不可取,但是怎么才算合适又是一个主观性很强的问题。一般的经验是将滑行制动调到跟传统车的发动机减速断油的制动相当即可,对于多个等级的滑行能量回收又可以更加精细化定义制动强度。经济模式的滑行能量回收强度要大,因为经济模式主打的是节能,但是最好不要超过0.13g,按照法规要求,如果减速度大于0.13g就必须点亮刹车灯,而且过强的减速感也容易会让驾驶员产生慌乱,基于安全考虑法规不允许滑行能量回收将车刹停;相比之下,动力模式的滑行能量回收强度要弱一些。
制动能量回收控制策略同样是整车标定很重视的功能,它涉及到节能、安全、驾驶性,这几项性能需要兼顾。制动能量回收功能并不是在任何时候收油门都可以回馈能量产生制动力的,制动能量回收首先保证汽车制动的安全性和稳定性,因此在急减速或者ABS/ESC触发的情况下要关闭能量回收功能。制动能量回收还需要考虑很多边界条件,比如电池SOC不能过大,电机转速不能太小,电机温度、电池温度也会影响到发电和充电效率,母线电压和电机外特性决定了电机制动力边界。根据电机的工作特性,见图7,在转速比较低时候,电机反拖并不能产生电能回馈,而是要消耗电池能量,电机特性曲线中有一个基速,基速以下电机最大制动扭矩保持不变,基速以上电机最大制动扭矩随转速增加而减小。电机特性曲线被理想电机力矩退出曲线分成两部分:回馈制动区和耗电制动区,前者可以通过发电产生制动转矩,后者电池放电才能产生制动转矩,无法回收能量。
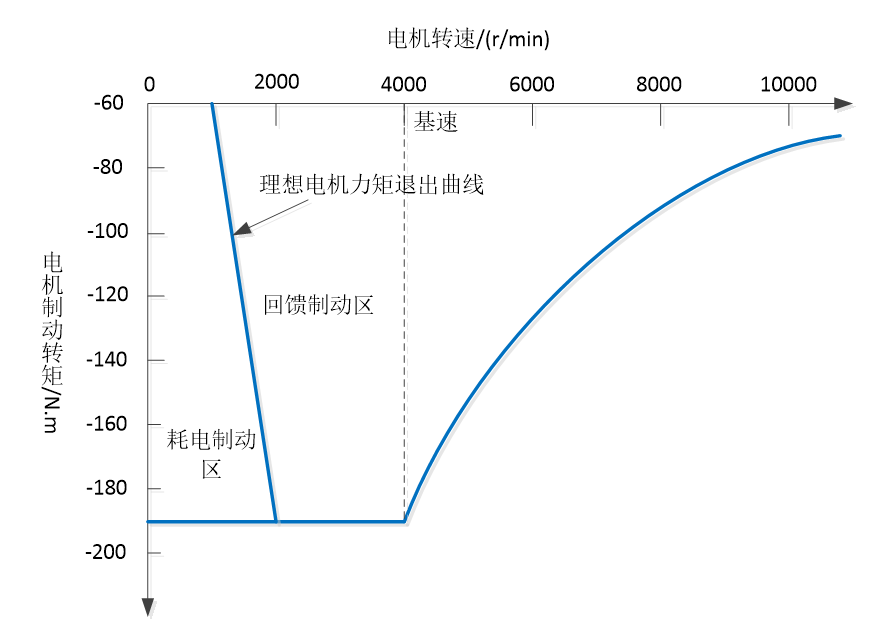
图7 电机回馈发电特性曲线
制动能量回收涉及到两种分配关系,一个是前后轴的制动力分配,另一个是驱动轴的电机制动和机械制动的分配,前者涉及到制动的稳定性,后者涉及到能量回收的效用。制动能量回收策略对能量回收利用率影响很大,目前基本上都在采用串联式(或协同式)制动能量分配策略,前后轴的制动力分配则通过模糊算法达到最佳回收效果。为了实现更高的制动能量回收率,车辆都配备了线控制动系统,比如EHB、EMB等。
●扭矩滤波控制●
扭矩滤波是为了消除需求扭矩的毛刺,避免扭矩突变导致的顿挫、闯车等驾驶性问题。一般系统会采用两个串联的一阶低通滤波器对原始需求扭矩进行滤波。扭矩滤波的计算包含以下三种情况:
穿越扭矩零点时的斜率
接近目标扭矩时的斜率
最大斜率
扭矩滤波经常用于零点穿越和蠕行控制,下面分别介绍。
(1)
穿越扭矩零点时的斜率
负载转换时需求扭矩会存在从负扭矩转向正扭矩或者从正扭矩向负扭矩转换的情况,在扭矩穿过扭矩零点时,需要根据车速和上一时刻的需求扭矩对其斜率进行控制。
电机在扭矩零点附近时,由于传动齿轮间隙的存在,经常会出现加减速抖动。齿轮间隙怎么产生的呢?当主动轮带动从动轮转动时,由于齿轮存在运动间隙的缘故,这时两齿轮在一侧啮合,另一侧则可能出现缝隙,如图8中的回程间隙。由于制造、装配原因,两啮合齿轮间的间隙是不可避免的,所以在负载扭矩的正负方向转变时,齿轮啮合就从一侧转向另一侧,如果转换过快则会加重噪声、抖动等现象。策略上,当穿越扭矩零点一定范围内时就要采用Parabolic(抛物线)滤波,使扭矩在0附近缓慢变化,消除对传动系统的冲击。
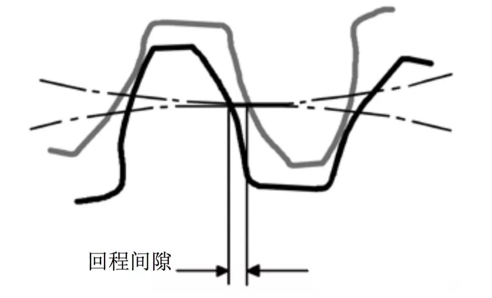
图 8 齿轮间隙的产生
驾驶性优化的核心策略是扭矩的分段处理,需要考虑驱动扭矩和制动扭矩的增减、变化率、变化范围等,根据不同条件选择相应的扭矩处理算法,在满足动力性需求的基础上尽可能的优化驾驶感受。图9是加减速过程零点控制时扭矩滤波的示意说明。
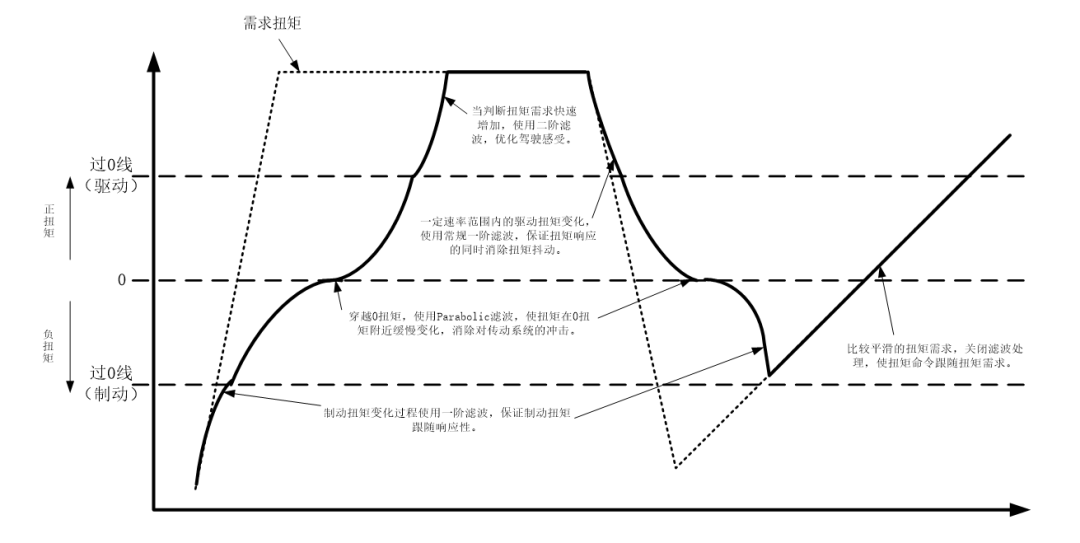
图9 扭矩滤波示意说明
(2)
蠕行扭矩控制
车辆蠕行要应对不同的路况,比如从滑行到蠕行、平路蠕行到坡道蠕行、上坡蠕行和下坡蠕行、不同制动下的蠕行等,不同的蠕行工况对应的需求扭矩也不一样。蠕行过程中,VCU发送初始扭矩需求(通常由蠕行标定设定),转速随车速的增加而平滑减小,最终达到一个稳定的转矩。蠕行控制涉及到初始扭矩设定和转速PI控制,都涉及到扭矩滤波。
●扭矩限制及仲裁●
扭矩限制的目的是为了系统保护,当多个子系统对最大扭矩有限制要求时,则要满足最低要求,这一原则符合“木桶效应”。扭矩限制的情况包括:DCDC反压限制、系统过载保护、功率电子保护、电池保护限制、故障跛行限制等。
扭矩仲裁的原则是基于安全性考虑,当多个功能同时被执行时,则以安全性优先级较高者优先执行,比如油门和刹车同时踩下,则执行刹车,这就是刹车优先策略。在控制策略上要基于用车环境、功能安全来制定扭矩优先级,比如,ESP降扭>ESP升扭>定速巡航扭矩>自适应巡航扭矩>自动泊车扭矩>蠕行>油门。
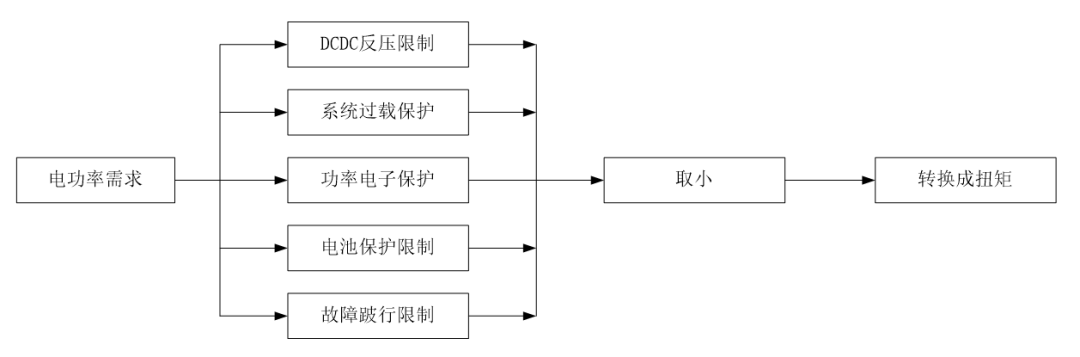
图10 扭矩限制和仲裁
END
参考文献
[1] 吴杰余.新能源汽车时代的电动化技术实践[M].武汉:武汉理工大学出版社,2024.1
[2] 龚春忠,赵坤民.电动汽车动力性经济性测评及优化技术[M].北京:机械工业出版社,2023.5
[3] 胡伟,孙勇,朱磊.纯电动汽车控制系统集成开发设计[M].北京:机械工业出版社,2021.8
由电动车千人会主办的“EVH第七届全球新能源动力总成年会暨千星奖颁奖典礼”将于2024年11月21-11月22日在上海举行。
华为数字能源智能电动产品线副总裁,陈伟先生出席并作题为《智赋新生,云驭安全》的报告。
演讲嘉宾

华为数字能源技术有限公司(简称“华为数字能源”)是全球领先的数字能源产品与解决方案提供商。我们致力于融合数字技术和电力电子技术,发展清洁能源与能源数字化,推动能源革命,共建绿色美好未来。在清洁发电方面,推动构建以新能源为主体的新型电力系统;在交通电动化方面,重新定义电动汽车驾乘体验和安全,加速绿色出行的普及;在绿色ICT能源基础设施方面,助力打造绿色、低碳、智能的数据中心和通信网络。华为数字能源将通过持续的技术创新,携手全球伙伴开放合作,助力早日实现碳中和目标。目前华为数字能源约有10,000名员工,业务遍及170多个国家和地区,为全球30多亿人口提供服务。
EVH原创文章
1.英搏尔新能源汽车电驱系统现状及发展趋势
2.DHT电机油冷热管理及电机装配设计
3.2024年欣锐科技小三电集成技术
4.吉利多合一集成电驱动方案介绍
5.电动汽车无线励磁同步电机的前瞻研究
扫描二维码|关注我们 ● 电动车千人会 ● | 扫码关注智能汽车 ● EVH1000智能汽车 ● |
欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式
【免责声明】文章为作者独立观点,不代表电动车千人会立场。如因作品内容、版权等存在问题,请于本文刊发30日内联系电动车千人会进行删除或洽谈版权使用事宜
👇👇👇点击“阅读原文”,报名参加“EVH2024第七届全球新能源动力总成年会”!

