EtherCAT技术具备快速响应和高效率的特点,在工业自动化领域显得至关重要,其灵活的拓扑结构是其核心优势,支持多样化的网络布局,无需交换机或集线器,简化布线,降低成本,提高系统可靠性和灵活性。
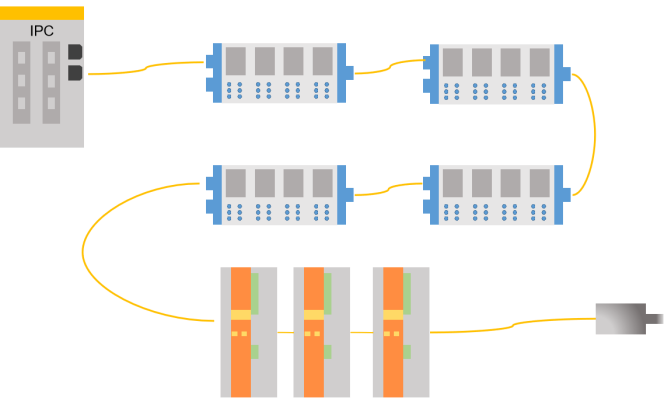
图1 线性拓扑示意图
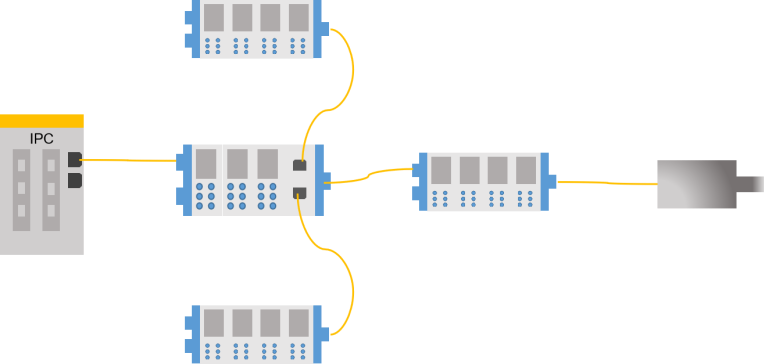
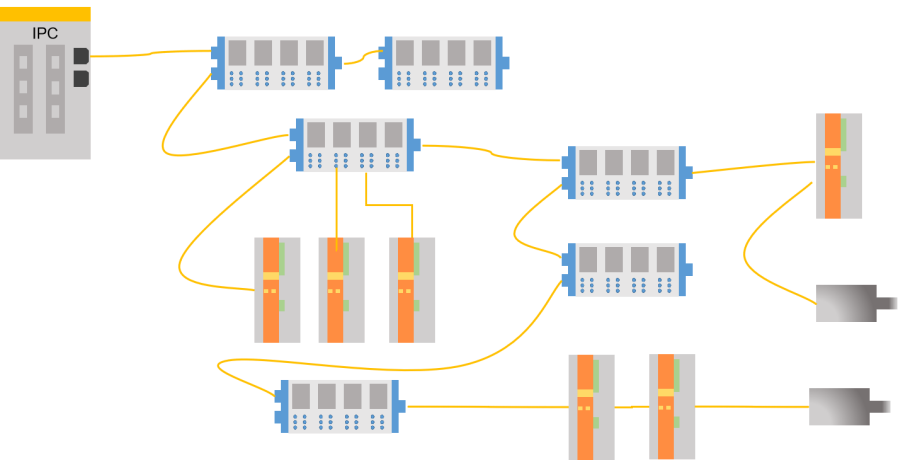
图2 星型拓扑示意图
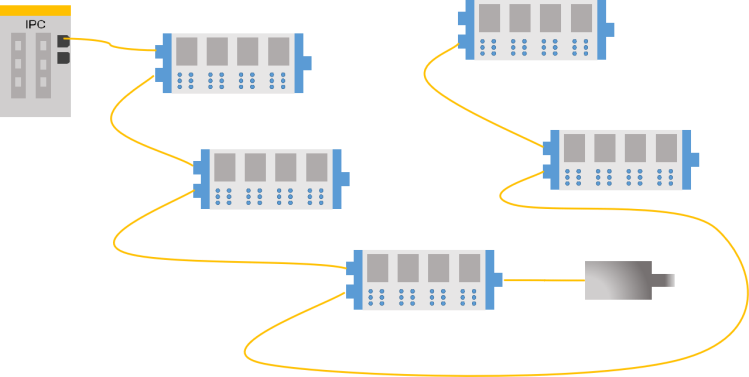
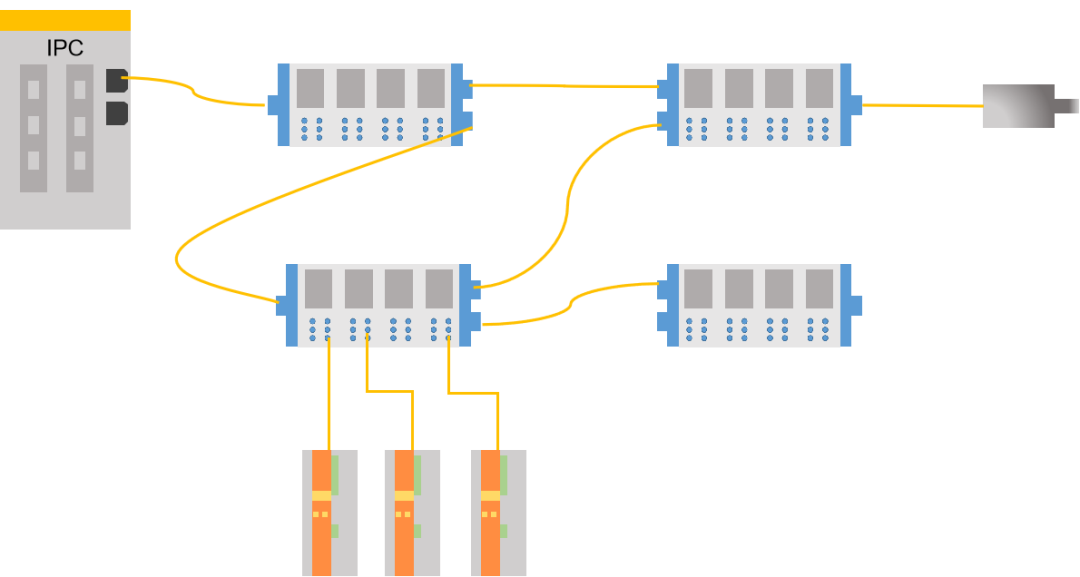
图3 环形拓扑示意图
树形拓扑:类似于树的结构,从一个根节点分出多个分支。树形拓扑的优点是易于扩展,可以覆盖更大的范围;缺点是根节点的故障将导致整个网络中断,适用于需要扩展性复杂的网络。
网状拓扑:网络中的节点通过多条路径相互连接。网状拓扑的优点是具有极高的冗余性和可靠性,缺点是成本较高,布线复杂,适用于对网络稳定性和可靠性要求极高的大型系统。
混合拓扑:结合了两种或以上的拓扑结构,提供设计上的灵活性,优化网络性能和可靠性。适用于需要综合考虑性能、成本和可靠性的复杂应用场景。
 EtherCAT在拓扑网络中的数据传输机制与关键技术
EtherCAT在拓扑网络中的数据传输机制与关键技术数据帧在通过网络传输的过程中,能够被各个从站节点实现读取和插入数据,而不需要等待整个数据帧的接收和处理完成。这种方式极大地提高了数据传输的效率和速度,因为它允许数据中即时处理,从而减少了等待时间,并提高了整体的通信性能。
热连接技术允许EtherCAT网络中的从站在不中断网络通信的情况下,动态地加入或离开网络。这种技术特别适用于需要高灵活性和可扩展性的工业自动化系统。例如,在某些应用场景中,用户可能需要在不停止整个生产线的情况下更换或添加设备,热连接技术就能够实现这一点。
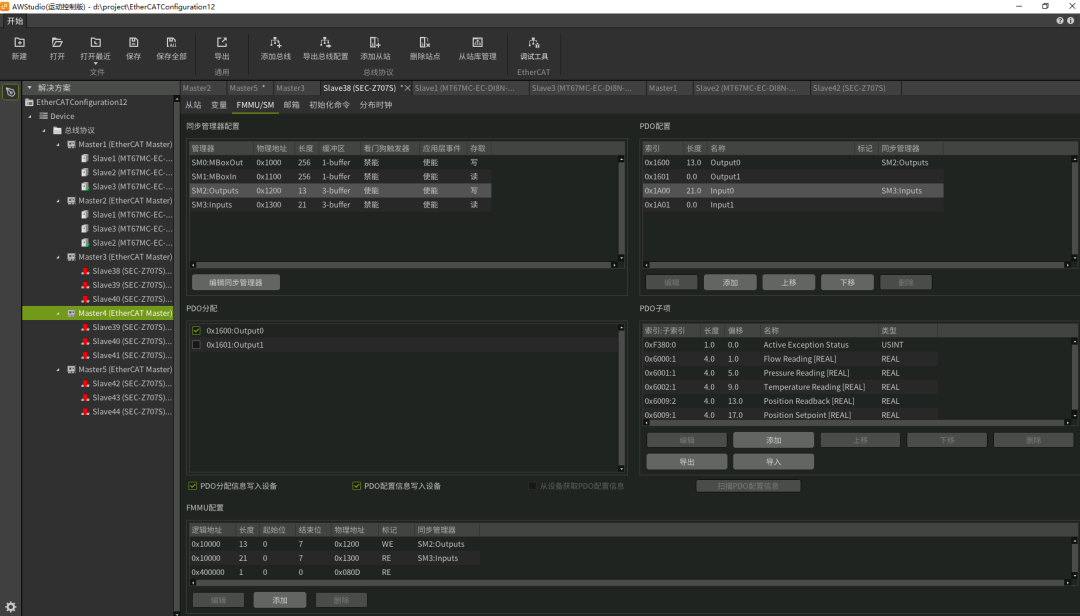
表1 EtherCAT主站控制器
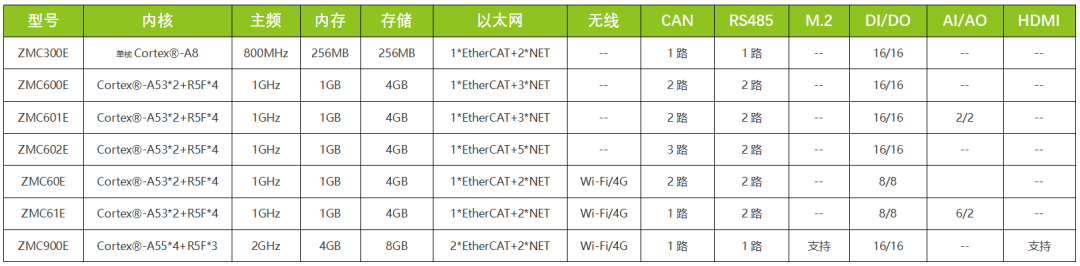


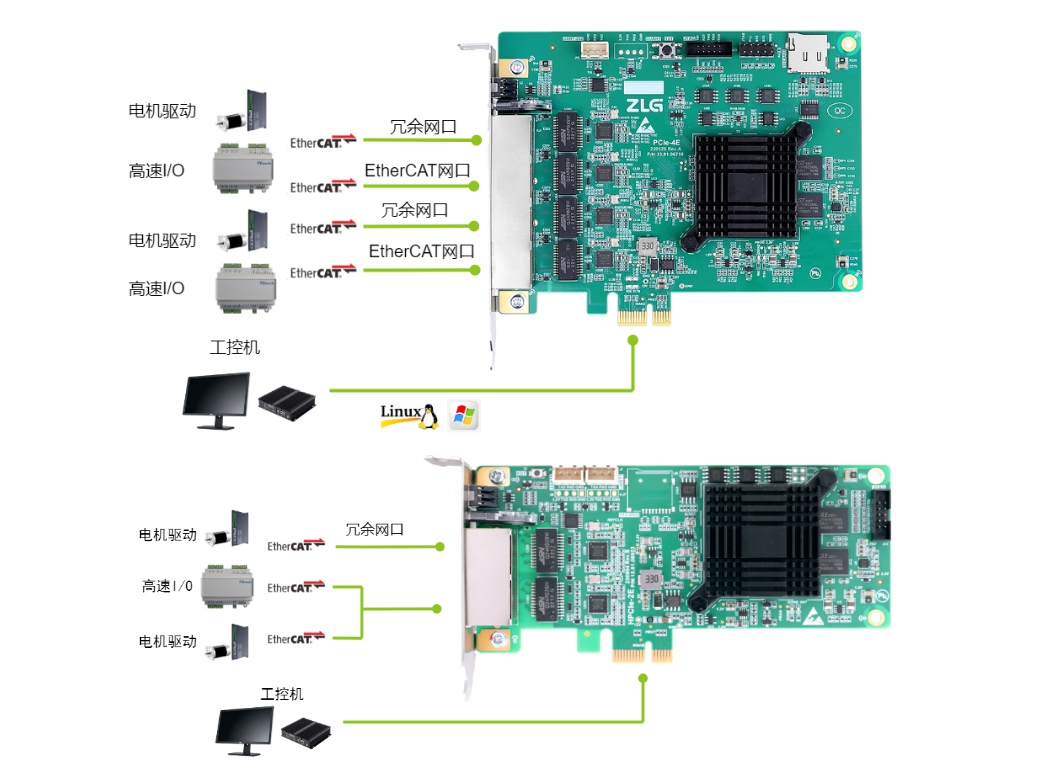
图8 PCIe EtherCAT主站通讯卡
EtherCAT 系列文章
【新品上市】ZMC900E 国产高性能EtherCAT总线控制器
【新品上市】ZLG致远电子PCIe EtherCAT通讯卡产品正式发布!
【技术分享】EtherCAT技术赋能工业储能,优化GOOSE网络实时性与效率
【技术分享】人形机器人时代已来,解锁未来智能奥秘
【技术分享】EtherCAT 分布式时钟简介
【200个电机驱动】如何实现EtherCAT分布式供电?
【200个电机驱动】如何同步运行?--基于EtherCAT的柔性电机驱动系统
【200个电机驱动】如何快速搭建柔性自动生产线?
【插针机PLC开发】用AWBlock开发运动逻辑
【插针机HMI开发】用AWTK开发人机界面
【技术分享】EtherCAT 数据帧格式和寻址方式简介
【技术分享】“脱胎换骨”--插针机运动控制
【技术分享】EtherCAT总线如何对从站固件进行升级?
【技术分享】EtherCAT冗余技术如何实现通信线缆断开的补救?
【技术分享】如何精准分析人形机器人运动数据?
【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?
【产品应用】使用PCIe EtherCAT通讯卡控制IO从站step by step(一)
【产品应用】使用PCIe EtherCAT通讯卡控制IO从站step by step(二)
【产品应用】ZMC900E控制器之ROS2环境安装指南
【产品应用】EtherCAT主站控制器系统实时性测试
【产品应用】ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
【产品应用】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
【产品应用】手把手带你使用ZMC300E绘图
【产品应用】三个步骤,让你的EtherCAT电机转起来
【产品应用】EtherCAT如何保障高效率、高实时性、高灵活性的现场总线通讯
【产品介绍】ZMC601E总线型边缘控制器 — 引领制造型企业数字化转型
【产品介绍】ZMC600E EtherCAT主站控制器全新上市
【产品介绍】ZLG推出新一代工业机器人解决方案,为工业机器人注入新的活力
ZLG官方旗舰店

广州致远电子
官方企业店

ZLG旗舰店

ZLG京东自营
旗舰店
更多往期文章,请点击“ 阅读原文 ”。