

CAN的起源

传统的汽车线束连接比较复杂。动力域控制器、仪表盘、车身域控制器之间用大量线束连接。
动力域控制包括:发动机控制Engine Control、变速箱控制Transmission Control、防抱死系统控制ABS、主动悬架控制Active Suspension等等。
车身域控制包括:车门控制Door Control、桌椅控制Seat Control、电源锁Power Locks、空调Air Condition、灯光控制Light Control、气囊Airbag等等。
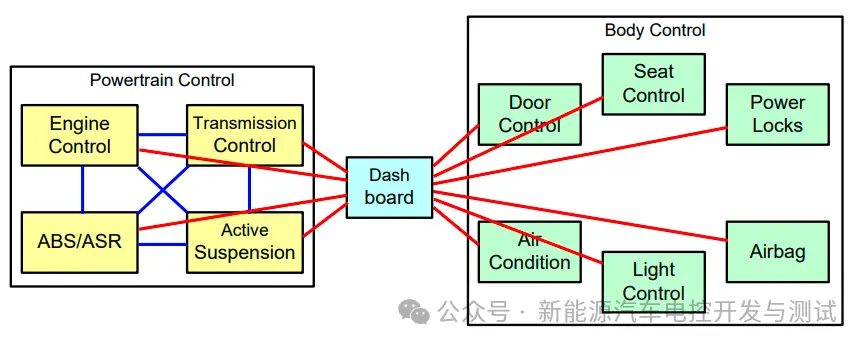
汽车线束连接图
传统线束连接比较紊乱加大了装配错误率;众多控制器需要大量的信号数据线,整车线束长度能达到2500米,这个时候会导致整车的电子控制系统线路复杂,维修起来也非常困难;另外加大了成本以及影响了整车的经济学与动力性。
1983年,德国Bosch开始研究车上网络技术,Bosch公司为解决现代汽车中众多控制单元之间的实时数据交换而开发的一种串行通信协议。
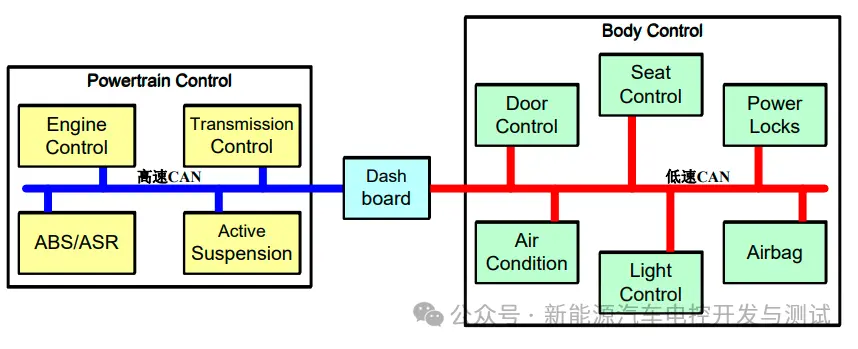
CAN网络通讯
CAN通讯优点
具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
具有优先权和仲裁功能,多个控制模块通过CAN控制器挂到CAN-buS上,形成多主机局部网络;
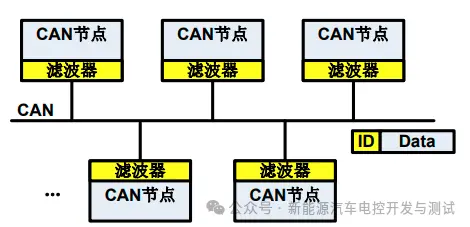
可根据报文的D决定接收或屏蔽该报文;
可靠的错误处理和检错机制;
发送的信息遵到破坏后,可自动重发;
节点在错误严重的情况下具有自动退出总线的功能;
报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
CAN的历史
1983年,Bosch开始研究车上网络技术
1986年,Bosch在SAE大会(汽车工程协会)公布CAN协议
1987年,Intel和Philips先后推出CAN控制器芯片
1991年,Bosch颁布CAN 2.0技术规范,CAN2.0包括A和B两个部分
1991年,CAN总线最先在Benz S系列轿车上实现
1993年,ISO颁布CAN国际标准 ISO-11898
1994年,SAE颁布基于CAN的J1939标准
2003年,Maybach发布带76个ECU的新车型(CAN,LIN,MOST)
2003年,VW发布带35个ECU的新型Golf
现在,在每一辆新车均装配有CAN局域网
CAN的应用领域
汽车制造
大型仪器设备 医疗器械:CT
工业控制:电梯,地铁,航天
智能家庭和生活小区智能化:远程抄表,防盗,防火
智能机器人
CAN的特性
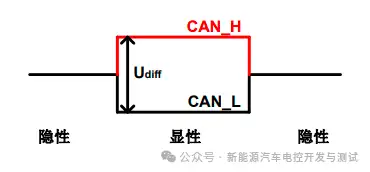
1. 使用双线差分信号:两根线上都传输信号,这两个信号振幅相等相位相差180°极性相反,所有的有电压信号都是差分的。差分信号是一对大小相等而极性相反的对称信号。差分信号传输在收端是靠差分放大器来检测的。差分放大器只对两路输入信号之间的差值起放大作用,而对两路输入信号共同对地的电位不起作用。
2. 协议本身对节点的数量没有限制,总线上节点的数量可以动态改变。
3. 发送的报文可以被总线上所有节点同时接收。
4. 多主站结构,各节点平等
5. 每个报文的内容通过标识符识别,标识符在网络中是唯一的。

6. 根据需要可进行相关性报文过滤。
7. 保证系统数据一致性: CAN提供了一套复杂的错误检测与错误处理机制,比如CRC检测、错误报文的自动重发、临时错误的恢复以及永久错误的关闭。
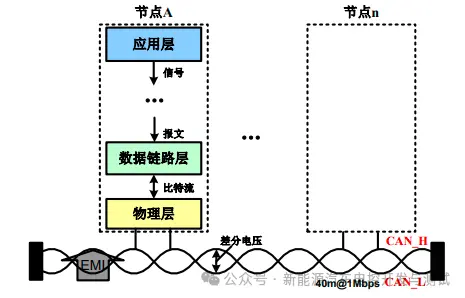
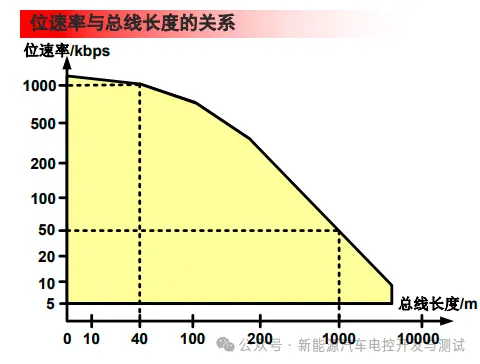
8. 使用双绞线作为总线介质,传输速率可达1Mbps,设计理论总线长度<=40米,随着线缆长度增加,速率传导效率会下降。
9.总线访问—非破坏性仲裁的载波侦听多路访问/冲突避免CSMA/CA (Carrier Sense Multiple Access/Collision Avoidance)
多路访问(MA):如果总线空闲,则在同一时刻多个节点可同时访问总线(向总线发送数据)
冲突避免(CA):节点在发送数据过程中要不停地检测发送的数据,确定是否与其它节点数据发生冲突,并通过非破坏性仲裁机制避免冲突
载波侦听(CS):总线上各个节点在发送数据前都要侦听总线的通信状态。
来源:新能源汽车电控开发与测试
