
《APM32芯得》系列内容为用户使用APM32系列产品的经验总结,均转载自21ic论坛极海半导体专区,全文未作任何修改,未经原文作者授权禁止转载。
1 背景
上次我们利用pyocd和Python脚本对APM32F411进行了LED输出状态的读取以及读保护的解除(具体看:还可以这样玩?APM32F411与pyocd的火花[https://bbs.21ic.com/icview-3342212-1-1.html])。
我就在想既然可以读取寄存器的内容值,并打印出来,那我们是不是也可以利用Python的库把读取到的内容进行波形绘制出来呢?
想到就去做。
2 Python的波形绘制
Python的波形绘制,我们可以利用matplotlib库。
安装命令:pip install pyocd matplotlib
这个是它的文档:https://matplotlib.org/stable/users/index
我们这里仅需要绘制一个简单的线图,有内容有:
1. y轴,内容(值的大小)
2. x轴,时间(表示采样到值的时间)
3. 描线,把一个个点采样到的内容描绘线,这个将是动态的。
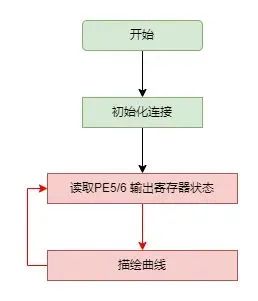
3 读取PE5/6的状态并输出数据波形
老规矩我们这里拿PE5/6练练手。具体流程如下:
1. 设置读取的地址,APM32F411的GPIOE ODR寄存器:
# APM32F411 GPIOE寄存器的基地址(根据参考手册确定)
GPIOE_BASE = 0x40021000
# GPIOE 输出数据寄存器的偏移量(根据参考手册确定)
GPIOE_ODR_OFFSET = 0x14
# GPIOE 输出数据寄存器地址
GPIOE_ODR = GPIOE_BASE + GPIOE_ODR_OFFSET
2. 设置读取的时间间隔和最大取点数量,我这里设置0.1s读取一次状态,保存的40个点:
# 读取的时间间隔
READ_INTERVAL = 0.1 # 单位秒
MAX_POINTS = 40 # max number of points to display at once
3. 设置横纵坐标的取值范围。
4. 设置matplotlib,及横纵坐标名称、图例等内容。
5. 然后写一个函数对状态进行读取:
# 更新波形函数
def update_line(frame):
# 使用PyOCD连接目标设备
with ConnectHelper.session_with_chosen_probe(unique_id=TARGET_DEVICE_SERIAL_NUMBER) as session:
board = session.board
target = board.target
gpioe_odr_val = target.read32(GPIOE_ODR)
pe5_state = (gpioe_odr_val >> 5) & 0x1
pe6_state = (gpioe_odr_val >> 6) & 0x1
# 更新状态
pin_states['PE5'].append(pe5_state)
pin_states['PE6'].append(pe6_state)
# 更新时间点
current_time = time.time() - start_time
time_points.append(current_time)
# 更新波形图
lines_pe5.set_data(time_points, pin_states['PE5'])
lines_pe6.set_data(time_points, pin_states['PE6'])
# 移动时间轴
if len(time_points) == MAX_POINTS:
ax.set_xlim(time_points[0], time_points[-1])
return lines_pe5, lines_pe6
6. 最后把波形进行显示出来。
最后我们看看效果:

但是波形和我们目标板卡上的灯闪烁(时间间隔一致,及0/1的时间应该是同样的)不太一样,这是为什么呢?请看5.2小结。
4 读取RAM的内容并输出数据波形
4.1 设置波形
保存在RAM的数据我这里用在线的网站整了两个波形:
y=500sin(x/100)+500,y=200sin(x/100)+500。
为什么选这两个波形呢?
因为这两个波形的数据都是正整数,因为我现在只想对`uint32_t`的数据进行描绘,所以我这里就选择了能在正整数区域,并小于0xFFFFFFFF的数据。
4.2 波形取点
我计划在APM32F411的滴答demo里面对这个两个波形进行描绘,但是我们知道——用MCU对三角函数的计算是较为不便的,很多情况下我们是对波形这里进行取点操作。
我这里也讨个巧,直接对波形进行取点。我这里写了一个Python脚本:
import math
# 定义波形函数
def wave1(x):
return int(500 * math.sin(x / 100) + 500)
def wave2(x):
return int(200 * math.sin(x / 100) + 500)
# 设置参数
points = 628
# 计算波形点并格式化为字符串
wave1_points = ', '.join(f'{wave1(x)}' for x in range(points))
wave2_points = ', '.join(f'{wave2(x)}' for x in range(points))
wave1_array_str = f"data1[628] = {{{wave1_points}}};\n"
wave2_array_str = f"data2[628] = {{{wave2_points}}};\n"
# 写入到文件
filename = 'E:/03_Work/00_Notes/APM32F4/APM32F411_python_pyocd_Graphic_drawing/code/wave_points.txt'
with open(filename, 'w') as file:
file.write(wave1_array_str)
file.write(wave2_array_str)
print(f"The wave points have been written to {filename}")
这里我对这个脚本进行一下简单的说明:
1. 导入`math`模块,以便可以使用其中的数学函数:正弦函数sin。
2. 定义波形函数`wave1`和`wave2`。`wave1`就是`y=500 * sin(x / 100) + 500`,而`wave2`就是`y=200 * sin(x / 100) + 500`。
3. 设置了一个变量`points`,表示生成的波形点的数量,我这里的取值是628,表示取628个点。
4. 使用循环计算每个波形点的值,并将这些值格式化为字符串。`wave1_points`和`wave2_points`分别保存了`wave1`和`wave2`的波形点的字符串表示,每个点之间用逗号分隔。
5. 通过字符串操作,将取到的波形点转换成字符串表示。如data1[628]就是我们波形1取到的点数。
6. 最后,代码将数组字符串写入到文件中。指定文件路径,我的是`E:/03_Work/00_Notes/APM32F4/APM32F411_python_pyocd_图形绘制/code/wave_points.txt`。
7. 最后打印出文件保存的路径,提示波形的数据点已成功写入文件。
总结起来,这段代码的作用是生成两个波形函数的波形点,并将这些点保存到指定的文件中。大家也可以参考这个操作生成自己想要的的波形的数据点。
4.3 编写APM32F411程序
把我们刚刚取到的点,放到APM32F411指定的RAM地址,然后隔一段时间赋值下一个点。
在MDK里面,指定某个数组保存在指定地址用的语法是:
__attribute__((section(".ARM.__at_0x20000000"))),0x20000000是指定的地址。
伪代码示意如下:
const uint32_t data1[628] = {500, 504, ...}
const uint32_t data2[628] = {500, 501, ...}
uint32_t w_data[2] __attribute__((section(".ARM.__at_0x20000000")));
...
...
while (1)
{
/* Precise Delay 1ms */
SysTick_Delay_ms(20);
w_data[0] = data1[i];
w_data[1] = data2[i];
i++;
if (i >= 628)
{
i = 0;
}
}
我这里每隔20m就描绘下一个点。
4.4 数据抓取并描绘
这个部分和上文提到的PE5/6的基本类似,但是我们需要注意的是:
1. PE5/6的状态只有0/1,它的脚本里面的y坐标的取值范围是[-0.5,1.5]。我们的波形取值到了[0,500],所以我们要修改一下坐标范围。
2. 然后读取的时间间隔设置短一定,因为我们APM32F411的波形绘制是20ms就进行下一个点的绘制了。
总体的代码这里就不贴出来了,大家最后可以看附件里面。
然后我们数据抓取的效果图:
和我们网站https://www.desmos.com/calculator?lang=zh-CN描绘的图像对比:
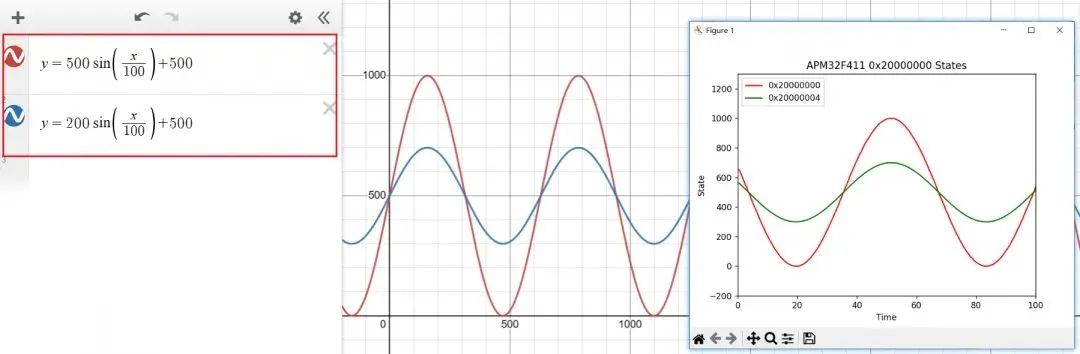
基本一致(不一致的原因是什么呢?大家可以想想)
5 基本原理解释
5.1 读取
数据的读取功能我们使用了pyocd的“target.read32”接口。用这个接口我们基本可以对APM32F411支持读取的区域进行读取。
5.2 采样
由于我们是利用pyocd+Geehy-link进行APM32F411的数据进行间隔一段时间进行读取的。这个就有一个叫做“采样率”的东西。
在实际应用中,我们的RAM内容数据其实是实时更新的,我们要清楚的知道我们的数据在ram中的更新频率,以匹配我们的读取频率才能得到更优的答案。
6 最后
利用pyocd+Geehy-link我们发现的可玩性巨高,更多好玩的东西欢迎我们一起讨论~~。
4.4 提及到的图像不一致的原因是什么呢?
答案就是我们的两个波形x轴的取值间隔是不一样的,网站绘制的图是非常标准的,我们绘制的图失真在APM32F411的绘制上:20ms才绘制下一个点,理论上应该是多少呢?欢迎评论区讨论!
注:文章作者在原帖中提供了工程文件,有需要请至原文21ic论坛下载
或点击下方 阅读原文 跳转
↑↑↑ 点击上方卡片关注极海 ↑↑↑



