


特斯拉在电子电气架构上的理念很超前,打破了传统的、低效的、智能化程度低的分布式架构开发模式,以功能域和位置域做为开发理念,极大的提高了汽车智能化水平、降低了整车BOM成本。
本文以特斯拉Model3 2019款、左舵、最高配为例,对其整车电子电气架构进行梳理,整理出整车信号系统和配电系统的详细EEA。并对控制器进行拆解,分析特斯拉如何实现如何简洁高效的电子电气架构。
电子电气架构系统复杂,笔者也有一些地方还没有完全理解,欢迎交流。
EEA:Electrical/Electronic Architecture,电子电气架构;
ADC:Autopilot Domain Controller,智驾控制器;
MCU:Media Controller Unit,特斯拉把座舱控制器叫做MCU,更为大家熟知的叫法是CDC(Cabin Domain Controller);
CarPC:特斯拉把智驾座舱控制器称作为车载电脑;
整车以前、左、右三个车身控制器为核心,实现了基础的车辆线控和所有低压系统的控制和供电。
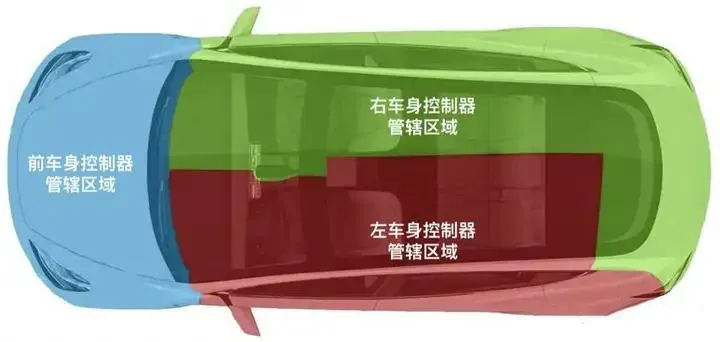
三大车身控制器除了各自负责临近设备的控制和供电,还有一些特有的分工:
前车身控制器实现暖通空调系统的控制,左车身控制器实现油门、刹车、转向信号的采集,右车身控制器有一条私有的PARK CAN连接到ADC,实现APA;
整车以三个车身控制器为核心,实现了基础的车辆线控;由ADC实现辅助驾驶功能;座舱MCU提升了整体交互体验;
整车以CAN网络为主,搭建起基础的通信网络,同时有3条主干通信链路;
Private CAN:动力系统、转向系统、制动系统;
Chassis CAN:冗余的转向系统、制动系统通信链路;
Vehicle CAN:冗余的动力系统通信链路,车身附件控制;
以车载以太网和LIN通信为辅;
智驾控制器ADC、座舱控制器MCU、诊断口、收音机使用车载以太网连接(这里收音机没有这么大的网络带宽需求,却用车载以太网通信是不太符合常理的,可能受制于供应商、成本考量?)
超声波传感器、温湿度传感器、前后头顶控制台、前车灯控制器、车尾灯控制器、雨刮、homelink等均使用了LIN通信;
智驾和座舱控制器之间有一条同轴线,可以把后向相机的画面转发到车机,实现倒车影像功能;
智驾域的“emergency audio” 共用了座舱域的ecall speaker;
座舱控制器直驱9个扬声器,并通过A2B信号经由头顶控制台到达位于后窗附近的功放模块,由功放再驱动6个全频和1个重低音扬声器;
车身附件就近接入3个车身控制器,实现最短线束;此外针一些对线束也通过passthrough方式,在控制器的连接器上对其进行路由,从而使庞杂的线束合并到一起,方便安装和管理;
OBD接口连接在左侧车身控制器上;
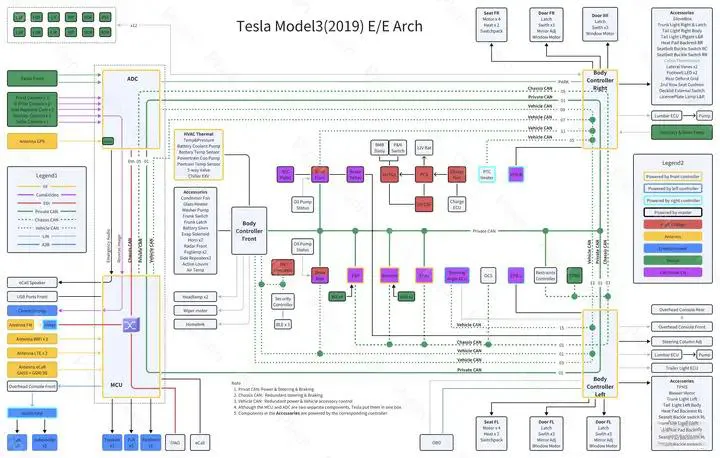
高清原图
前车身控制器实现一级配电,将电能分别传输给左、右车身控制器和暖通空调系统。
左右车身控制器进行二级配电,将电能传输给就近的零部件和车身附件。
左、右2个EPB分别由左、右车身控制器供电,线束更短且实现一定冗余。
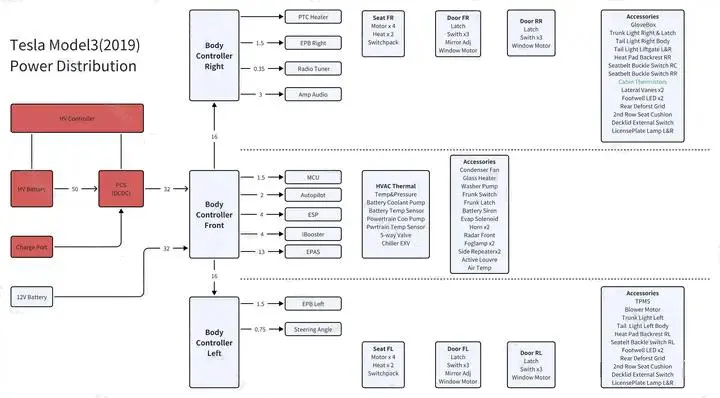
相比于传统的分布式架构,特斯拉的集成度大大提高,很多车身附件的控制直接由车身控制器负责。
下面通过拆解3个车身控制器来分析下如何实现如此简洁高效的系统架构,控制器做出了哪些改变?
在整车电子电气架构中,一共有4个主要的域控制器,分别是前车身控制器、左车身控制器、右车身控制器、智驾座舱控制器(装配在一个外壳里)。
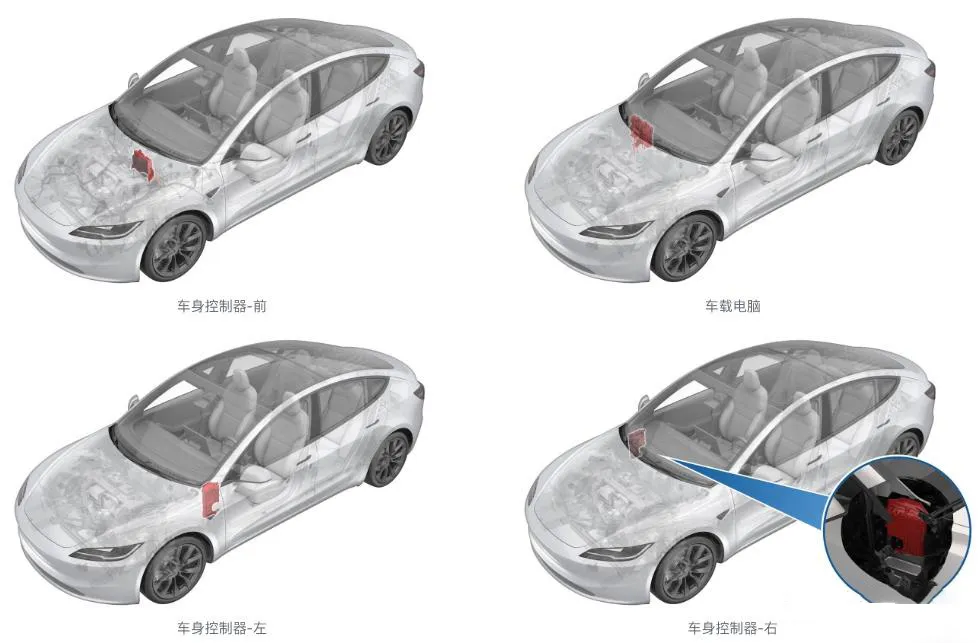

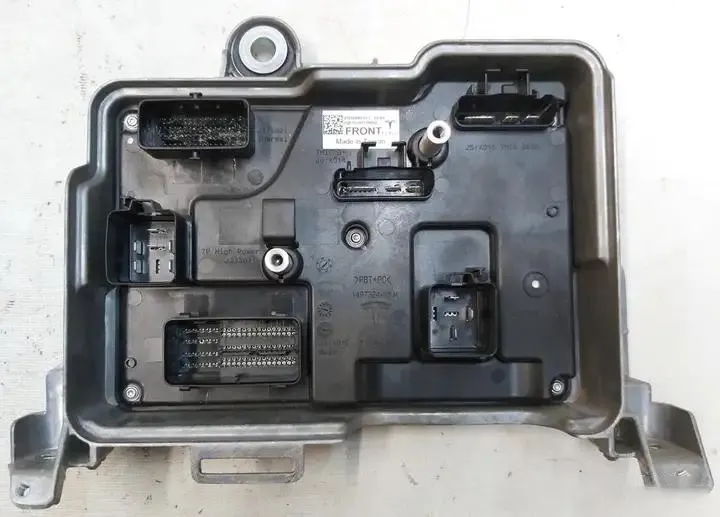

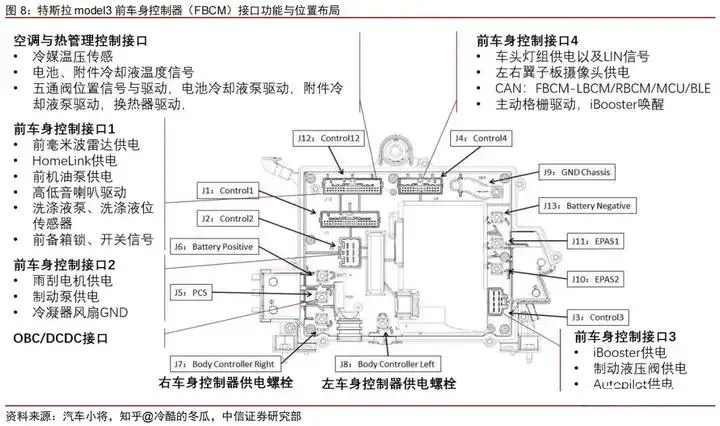
前车身控制器(Body Controller Front);
位置:车头前舱附近,离低压蓄电池近,方便取电,金属外壳;
作用:负责前舱设备的配电和控制,同时为左/右车身控制器供电,为智驾Autopilot、座舱MCU供电;
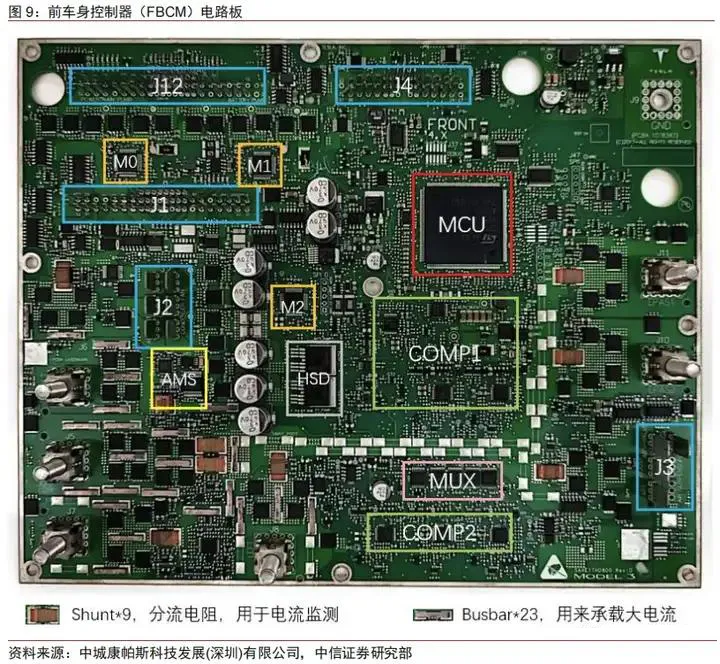
由ST的MCU作为主控,M0、M1、M2为安森美的直流电机驱动芯片,配合MOSFET即可驱动电机类负载(雨刮、液泵等)。
配电:由MOSFET+HSD实现配电通断控制(替代传统继电器),由AMS的ADC+采样电阻实现电流监测。
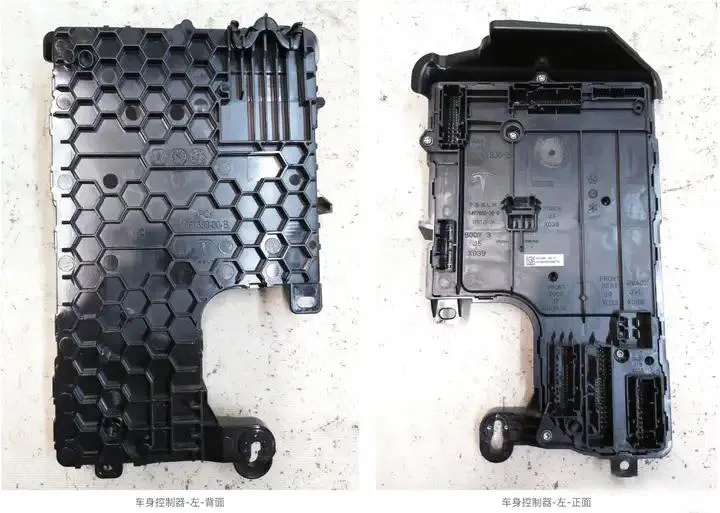
左车身控制器(Body Controller Left);
位置:主驾小腿左前方,沿车身纵向安装,塑料外壳PC材质;
作用:负责司机位及车辆左侧设备的配电和控制;
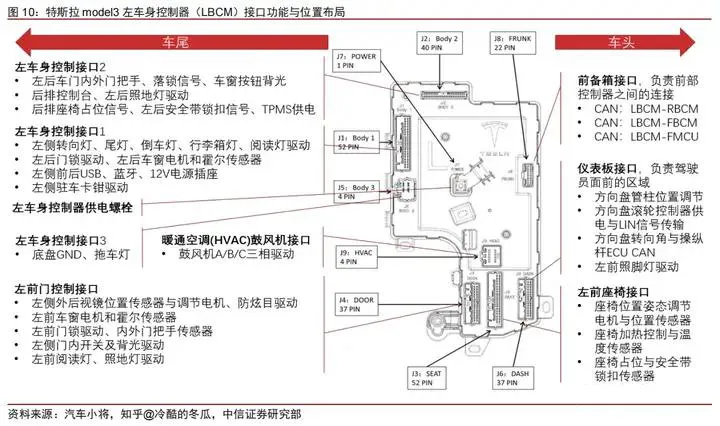
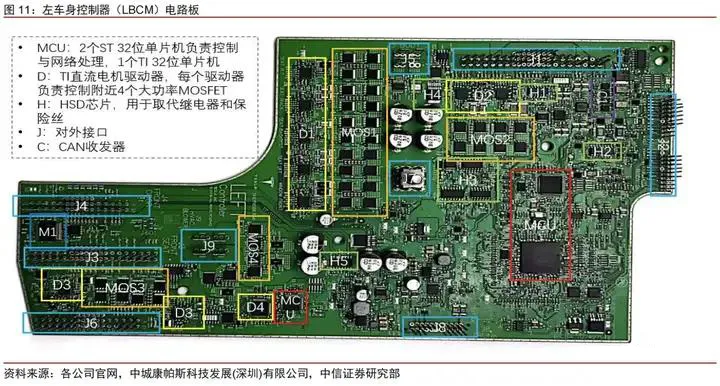
控制:由2颗ST的MCU作为配电控制和通信控制,1颗TI的MCU负责电机控制;
配电:灯具类由Infineon的BTS系列HSD芯片控制,电机类由ON的MOSFET驱动;
右车身控制器(Body Controller Right);
位置:副驾小腿右前方,沿车身纵向安装,塑料外壳PC材质;
作用:负责车辆右侧设备的配电和控制,同时也负责超声波雷达接入;
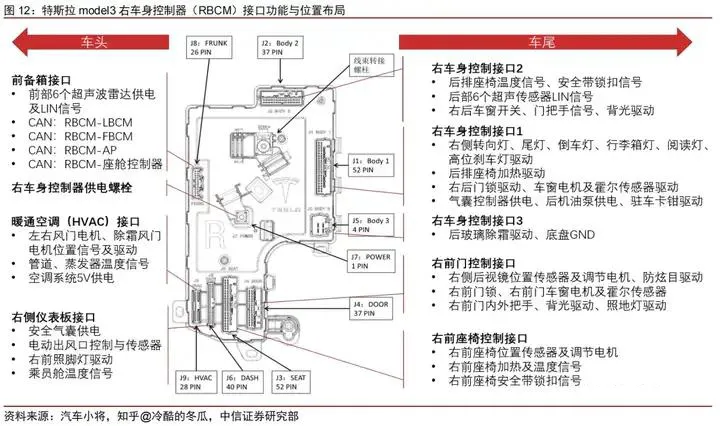
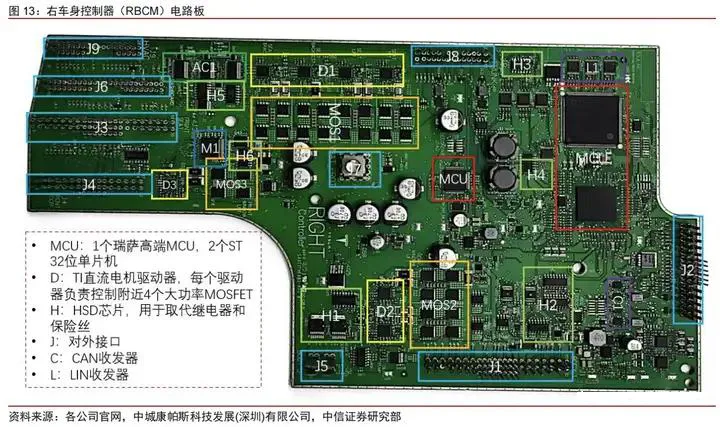
控制:相比于左车身控制器,还负责了车身后部的灯光&信号,所以主控由ST的MCU换成了瑞萨的高端单片机RH850系列,额外还有2颗ST的MCU辅助;
配电:同左侧;
回过头来看特斯拉的E/E架构,能看到五大域的影子,但又不完全相符。
特斯拉的思想和博世的五大域相比,相同的是都对各类控制器、功能进行合并,从而降低系统复杂度。
特斯拉更进一步的是不仅做了功能域的划分,同时做了物理域的划分,即就近原则,从而降低了线束成本。
最终使用前左右3个车身控制器就实现了动力域、底盘域、车身域、整车低压配电全部功能,3个区域控制器(前、左、右)内使用了大量的MOSFET和HSD芯片,实现全车的低压配电,不但能实现更完善的诊断功能,还可以实现配电系统的免维护(故障自恢复)。
近几年大家都在谈仓驾融合,虽然一直受限于没有合适的SoC,但特斯拉还是多走了一步,在2019年就已经把座舱域控和智驾域控装在了一起,除此之外,还集成了无线通信功能替代T-box。三者共用一个外壳,一套水冷散热。
有了车身控制器、智驾控制器、座舱控制器,极大的提升了整车智能化水平,从而实现软硬解耦;这样就可以通过OTA可以快速升级迭代产品功能,特斯拉在2014~2015年就率先开始在汽车上使用OTA技术。
特斯拉通过对智驾、座舱、车身、电驱、PCS、BMS等核心控制器自研,打破了主机厂和供应商的固有分工模式,供应商更多的承担了提供执行器的作用,而执行器的控制则握在自己手里。在现有基础上,未来特斯拉可能会做的一些改进舱驾融合,将座舱、智驾2块PCBA合并到1块电路板上,进一步提高集成度,降低成本(依赖于SoC的升级迭代)。
高压系统融合,对高压系统(PCS、HV Controller、BMS、BMB等)进行进一步的功能拆解和合并,将PCS和HV Controller合并。
参考资料
2.特斯拉EEA跟踪研究者不愿错过的一篇文章
3.特斯拉的三个区域控制器(Zonal)配置
4.Model 3 2024+ 维修手册
5.详解特斯拉电子电气架构
原文链接:https://zhuanlan.zhihu.com/p/711605829
