•VINS-Mono MONO SLAM https://github.com/HKUST-Aerial-Robotics/VINS-Mono•ORB-SLAM2 RGBD SLAM https://github.com/raulmur/ORB_SLAM2•LOAM Laser SLAM https://github.com/laboshinl/loam_velodyne•MaskFusion Semantic SLAM https://github.com/martinruenz/maskfusion•BundleFusion Dense 3D Reconstruction https://github.com/niessner/BundleFusion
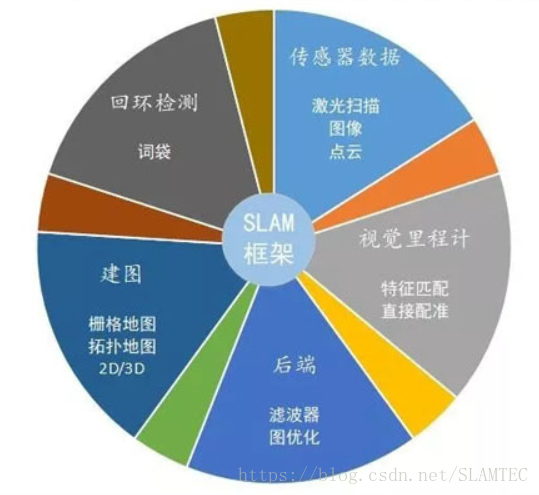
系统框架展示: 三、LOAM论文解读《LOAM:Lidar Odometry and Mapping in Realtime》LOAM是激光雷达slam中鼎鼎有名的,一套基于线面特征的前端框架。使用一个三维空间中运动的两轴激光雷达来构建实时激光里程计。提出可以同时获得低漂移和低复杂度计算,并且不需要高精度的测距和惯性测量。核心思想是分割同时定位和建图的复杂问题,寻求通过两个算法同时优化大量变量。:一个是执行高频率的里程计但是低精度的运动估计,另一个算法在一个数量级低的频率执行匹配和注册点云信息。将这两个算法结合就获得高精度、实时性的激光里程计。 使用以6自由度运动的2轴雷达的距离测量值。难点:不同时间接收到的距离测量值以及运动估计的误差会导致点云的误匹配.以高频率但低保真度执行测距法以估计激光雷达的速度+以较低的数量级频率运行,以进行点云的精确匹配和配准结果表明,该方法可以在最先进的离线批处理方法水平上实现准确性。主要贡献: 是把同时定位与建图(SLAM)技术分为两部分,一个是高频率(10HZ)低精度的里程计odometry过程,另一个是低频率(1HZ)高精度的建图mapping过程,二者结合可实现低漂移、低计算量、高精度的SLAM。 Lidar Odometry:分为特征点提取Feature Point Extraction和特征点关联 Finding Feature Point Correspondence两部分。