微信公众号:OpenCV学堂
关注获取更多计算机视觉与深度学习知识
引子
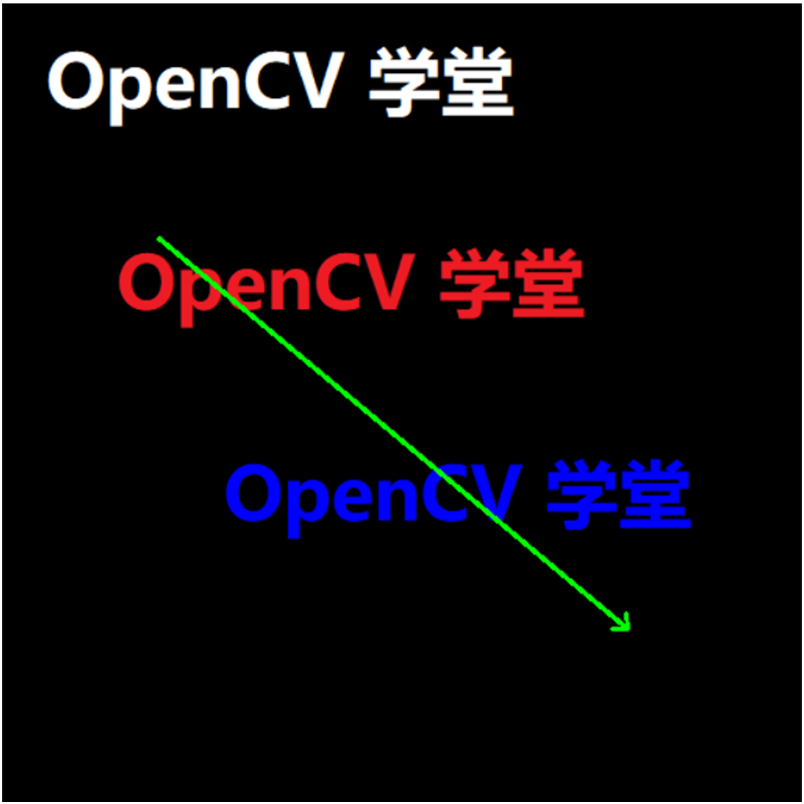
手动版实现带箭头的线段绘制
import math
import cv2 as cv
import numpy as np
image = cv.imread("D:/images/1024_mask.png")
length = 10
angle = 45
l1 = length * np.cos(angle * np.pi / 180)
l2 = length * np.sin(angle * np.pi / 180)
p1 = (100, 150)
p2 = (400, 400)
p3 = (0., 0.)
pt4 = (0., 0.)
# i,j代表p2、p3、p4相对于p0的正负
if p2[0] > p1[0]:
i = 1
else:
i = -1
if p2[1] > p1[1]:
j = 1
else:
j = -1
# 直线p1p2相对于x轴的角度,取正值
a1 = abs(math.atan((p2[1] - p1[1]) / (p2[0] - p1[0])))
# 用于计算p2相对于p0的宽高
w1 = l1 * math.cos(a1)
h1 = l1 * math.sin(a1)
p0 = (p2[0] - w1 * i, p2[1] - h1 * j);
# 直线p3p4相对于x轴的角度
a2 = 90 * np.pi / 180 - a1;
w2 = l2 * np.cos(a2)
# 用于计算p3和p4相对于p0的宽高
h2 = l2 * np.sin(a2)
p3 = (int(p0[0] - w2 * i), int(p0[1] + h2 * j))
p4 = (int(p0[0] + w2 * i), int(p0[1] - h2 * j))
cv.line(image, p1, p2, (0, 255, 0), 2, 8, 0)
# 画箭头
cv.line(image, p2, p3, (0, 255, 0), 2, 8, 0)
cv.line(image, p2, p4, (0, 255, 0), 2, 8, 0)
cv.imshow("arrow-line demo", image)
cv.waitKey(0)
cv.destroyAllWindows()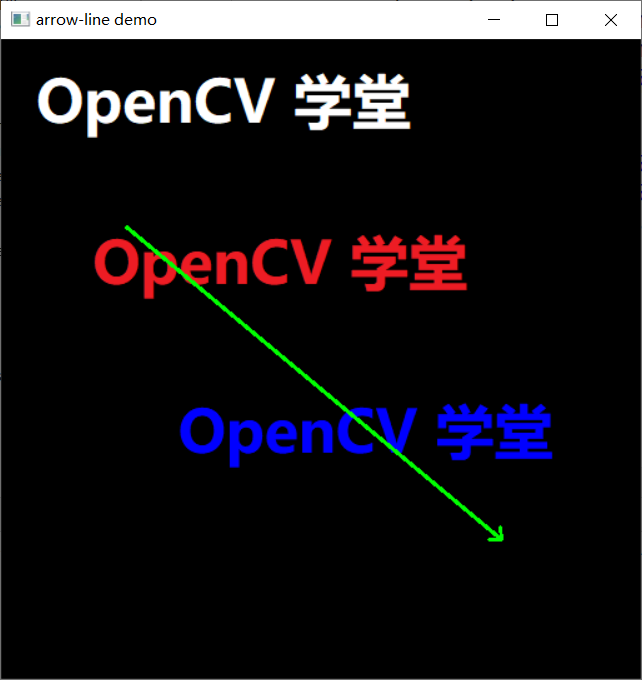
其实没那么复杂
void cv::arrowedLine(
InputOutputArray img, # 输入图像
Point pt1, # 线段端点
Point pt2,
const Scalar & color, # 颜色
int thickness = 1, # 线宽
int line_type = 8, # 渲染类型
int shift = 0,
double tipLength = 0.1
)import cv2 as cv
image = cv.imread("D:/images/1024_mask.png")
cv.arrowedLine(image, (100, 150), (400, 400), (0, 255, 0), 2, 8, 0, 0.05)
cv.imshow("arrow-line demo", image)
cv.waitKey(0)
cv.destroyAllWindows()OpenCV4系统化学习


推荐阅读
OpenCV4.8+YOLOv8对象检测C++推理演示
ZXING+OpenCV打造开源条码检测应用
攻略 | 学习深度学习只需要三个月的好方法
三行代码实现 TensorRT8.6 C++ 深度学习模型部署
实战 | YOLOv8+OpenCV 实现DM码定位检测与解析
对象检测边界框损失 – 从IOU到ProbIOU
初学者必看 | 学习深度学习的五个误区