

在人工智能(AI)机器人中,利用模拟触觉感知神经实现高级感知功能引起了人们的极大关注。然而,目前此类装置仍然体积庞大,而且缺乏可靠的能力,无法进一步将具有本体感知反馈的突触装置功能化。
据麦姆斯咨询报道,近日,新加坡南洋理工大学(Nanyang Technological University)、苏州大学和中国科学院宁波材料技术与工程研究所的研究人员组成的团队提出了一种由触觉触发的有机电化学突触晶体管(OEST)实现的柔性人工有机传入神经(AOAN),为智能机器人技术展示了基于硬件的认知识别能力。AOAN不仅能感知外部触觉信息,还能调节其对静态和动态触觉刺激的响应,从而实现类似于生物触觉系统的感知信息的存内(in-memory)计算。
AOAN表现出与压力强度相关的瞬态响应,并通过训练在低工作偏压(-0.6 V)下提高了对轻触的触觉灵敏度。此外,为了展示其在神经机器人中的潜在应用,AOAN实现了树突集成功能,以感知定向触觉模拟和识别物体的滑动。最后,通过学习定向触摸的实时空间信息,研究人员展示了采用AOAN系统与闭环反馈程序相结合的智能机器人在抓握时的滑动识别和预防措施。AOAN为下一代具有交互式感知/存储/计算能力的高能效、大规模硬连线神经形态系统的开发奠定了基础。上述研究成果以“Artificial organic afferent nerves enable closed-loop tactile feedback for intelligent robot”为题发表于Nature Communications期刊。
研究人员利用一种不对称区域规则共轭聚合物,简称PFT-100作为有机晶体管的通道层(图1b)。与常用的累积模式聚合物P3HT器件相比,基于PFT-100的晶体管具有较低的工作偏压,这是由于PFT-100聚合物与氟化苯并噻二唑的有序聚集所致。由聚偏二氟乙烯-共聚六氟丙烯(PVDF-co-HFP)离子导电聚合物基质和离子液体(IL)组成的固体电解质(SE)充当掺杂PFT-100共轭半导体的离子源。由于离子和电子相互作用以及耦合传输特性,PFT-100的电导率可通过栅极控制将阴离子从SE注入块体半导体进行体积电化学掺杂来调节。
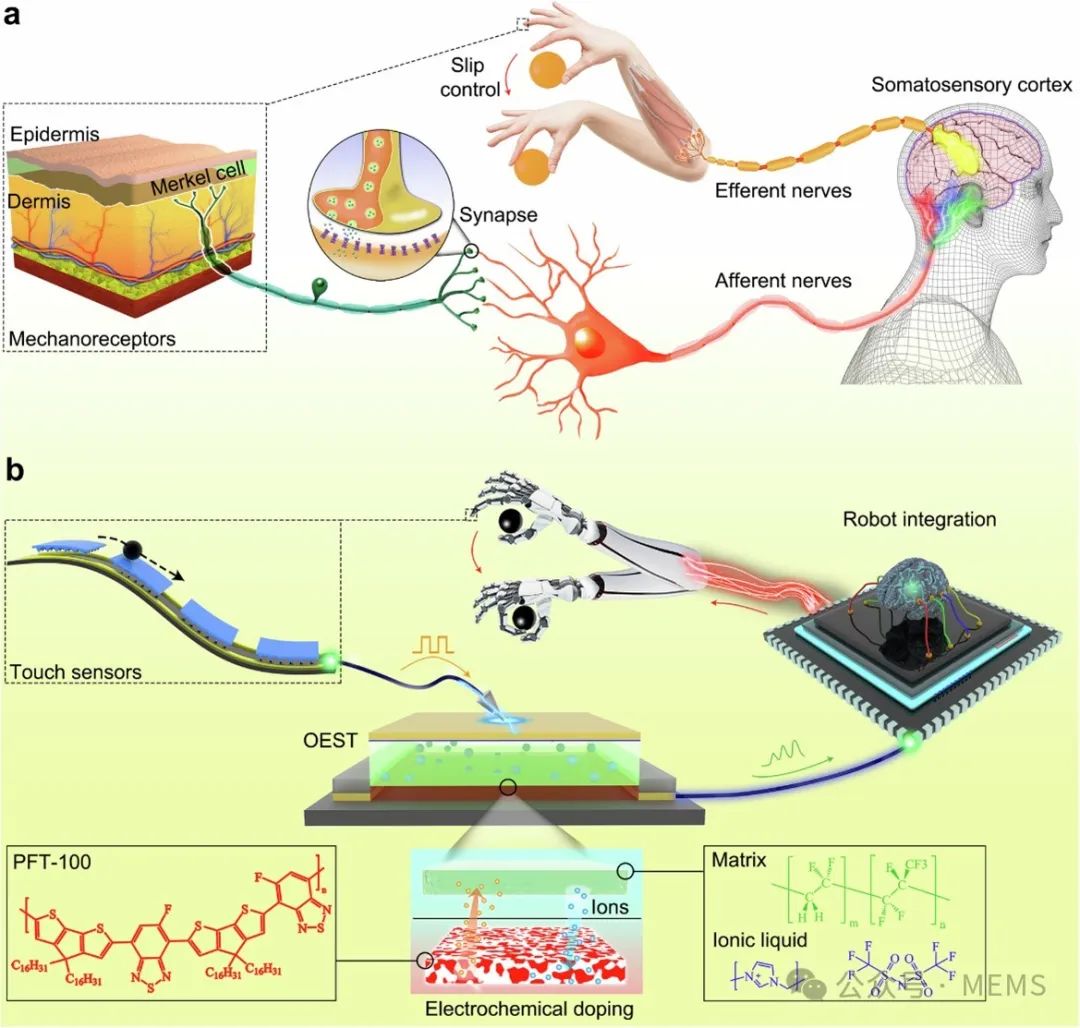
图1 人工有机传入神经与生物传入神经的比较
根据传输和输出特性,OEST在低电压(VD = -0.3 V)和高开关比(~3 × 10⁴)下作为p型增强模式晶体管工作。
鉴于OEST的仿生突触行为,研究人员构建了一个仿生AOAN来模仿生物系统中的触觉和存储行为(图2)。这是通过将触觉传感器集成到OEST的栅极来实现的(见图2d插图中的电路图)。这种AOAN类似于生物触觉神经,其中触觉传感器和OEST分别作为表皮中的人工机械感受器和突触,前者用于触觉感知,后者用于信号传输。研究人员将压力刺激转换为触觉传感器中的电阻变化(RTS),并在图2d中显示了有效栅极偏压(Veff.G)与施加压力(P)的关系。图2e显示了AOAN在不同压力水平下的传输特性,表明其在低电压(VG = -0.6 V,VD = -0.3 V)下工作的典型压力依赖晶体管行为。
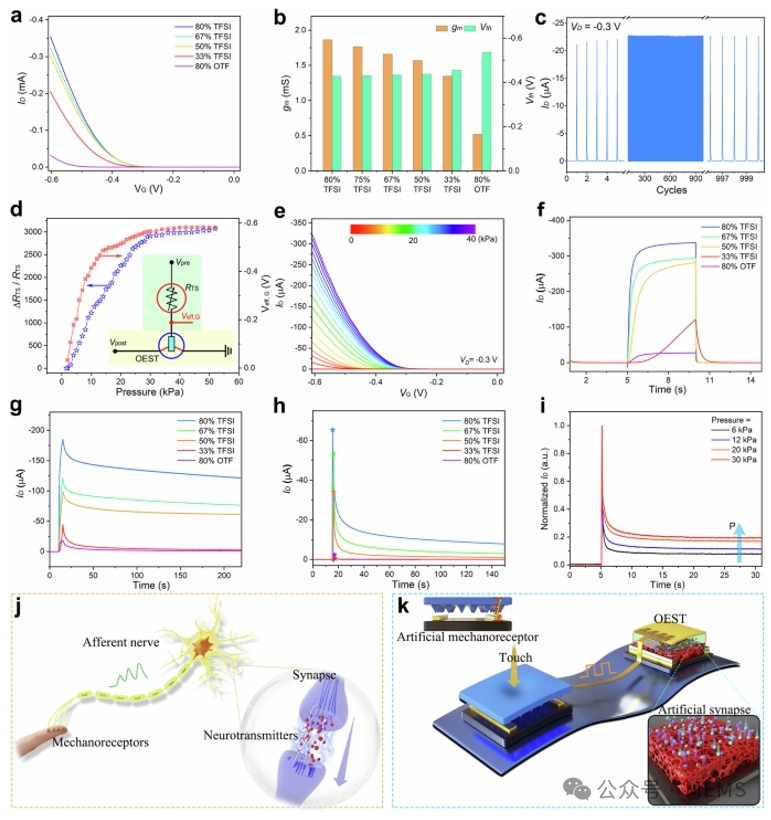
图2 压力触发的AOAN神经形态行为
触觉感知始于各种时空感官刺激的复杂集成,这使人们能够在触觉交互(例如抓取物体和触觉反馈)期间做出适当的反应。AOAN通过在时空上集成多个触觉传感器来降低复杂性,提供了一种直接的方法来模拟整合从前神经元的各种机械感受器到突触后神经元树突的外部触觉刺激(图3a)。
后神经元的特征提取能够识别来自前神经元的输入压力信息,并广泛应用于生物感知系统的训练和学习过程。用于多个输入刺激的单个输出突触后信号使感知数据能够通过编码的压力信息提供更多信息,从而大大减少了原始数据并简化了信息处理。作为概念验证,研究人员将AOAN集成到机器人手指上,以实现触觉信息处理和运动识别,其中四个机械感受器排成一行(图3c)。
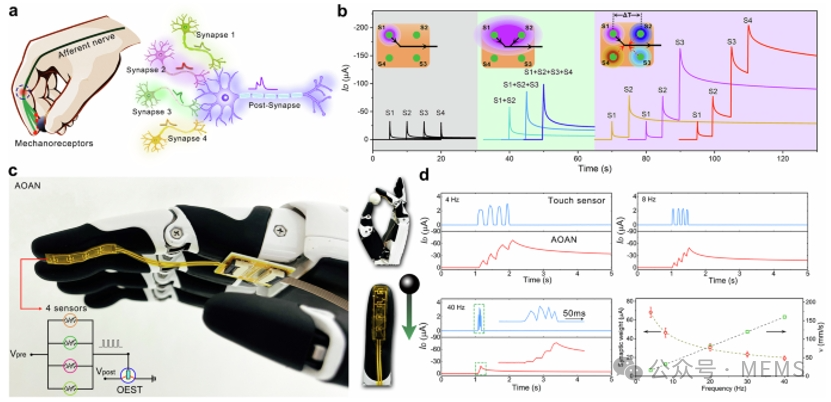
图3 用于机器人集成的AOAN中的树突集成功能
为了实现实时动态触觉反馈系统,研究人员将AOAN与机器人夹持器上的四个传感器集成在一起,如图4a所示。通过学习触摸的实时空间信息,研究人员展示了智能机器人夹持器的触觉反馈的闭环控制。图4b显示了由于抓握力不足导致的小球滑动,滑动路径依次经过四个传感器。通过特征提取,可以从输出图中很好地识别小球的状态(握持、滑动)和位置(如图4c所示的p1、p2、p3、p4、p5)。实验结果表明,AOAN能够使机器人夹持器在发生物体滑动时进行实时滑动识别和预防,为智能机器人的发展提供了一条有希望的途径。
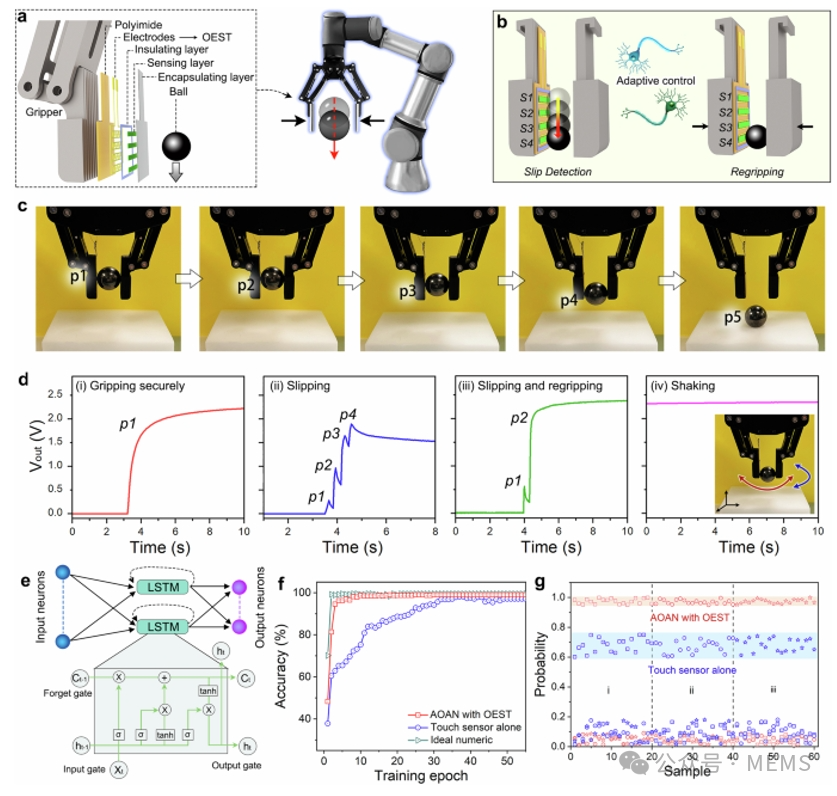
图4 基于AOAN和闭环控制程序的智能机器人实时动态滑动感知与预防
综上所述,这项研究利用离子渗透性共轭聚合物构建了一种有机电化学突触晶体管,该晶体管具有低工作电压(-0.6 V)、高开关比(>10⁴)和优异的稳定性(>1000次循环)。通过集成人工机械感受器和突触晶体管,研究人员构建了一种人工有机传入神经(AOAN),其在形态和功能上与生物触觉系统基本相似。该AOAN增强了对轻触的触觉灵敏度和时空触觉信息的识别/感知,并且其信号在传输过程中的损失较低。通过学习定向触摸的实时空间信息,研究人员展示了一个基于AOAN和闭环控制程序的智能机器人,以实现滑动识别和滑动预防措施。这项工作为开发具有人工智能、仿生电子和智能假肢的下一代神经机器人提供了一种有前景的策略。
论文链接:
https://doi.org/10.1038/s41467-024-51403-9
《机器人传感器技术及市场-2022版》
《触觉技术及市场-2022版》
《First Sensor工业级STARe压力传感器芯片产品分析》
《Merit Sensor压力传感器及MEMS芯片分析》
《电子皮肤贴片技术及市场-2022版》
《可穿戴技术及市场-2023版》


