


来源:公众号【鱼鹰谈单片机】
作者:鱼鹰Osprey
ID :emOsprey
最近玩了docker,发现真的很方便,和Java 、Python这种类似,一次写好,到处运行。
虽然是一项技术,也是工作技能,但只是工作怎么行,闲暇之余,还是可以用来摸摸鱼的。
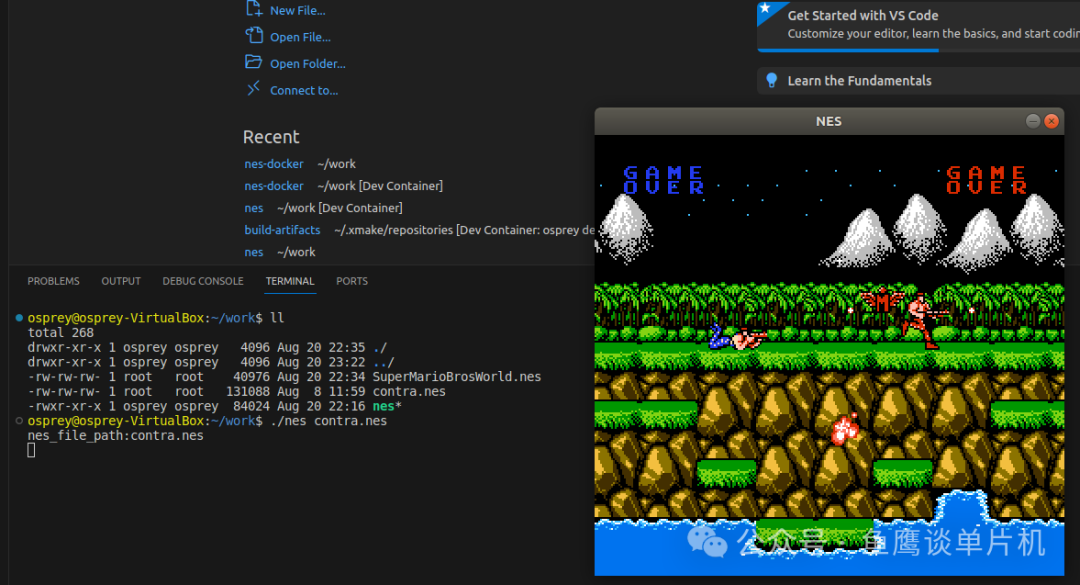
比如用来玩玩魂斗罗
超级玛丽
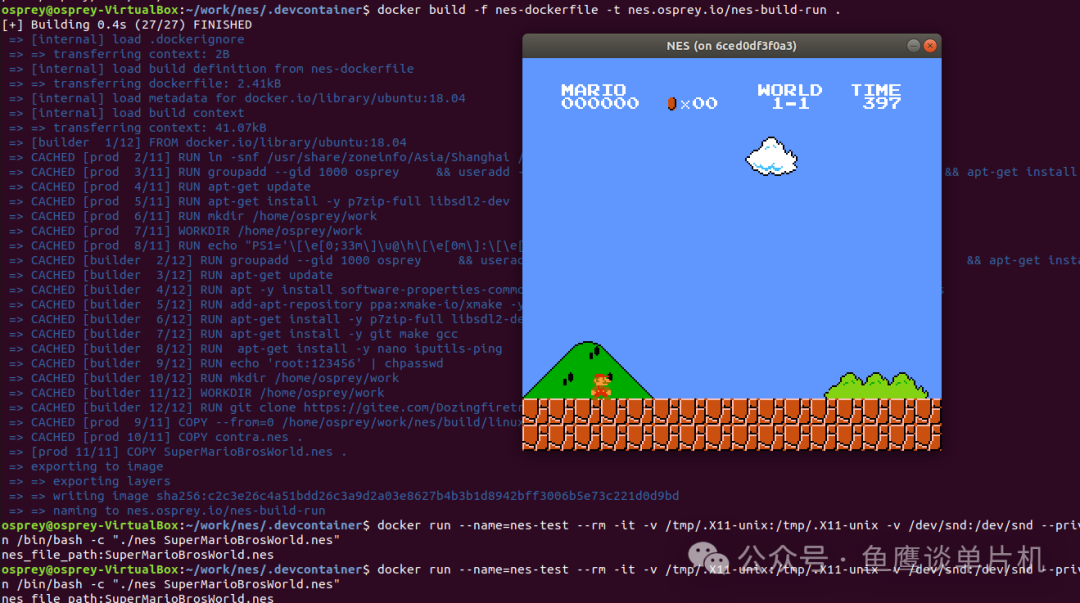
只要是nes游戏,应该都支持。
双人模式下,目前数字键使用的是小键盘。
nes-dockerfile 文件
FROM ubuntu:18.04 as builderMAINTAINER Osprey#docker build -f nes-dockerfile -t nes.osprey.io/nes-build-run .# docker start nes-build# docker attach nes-build# docker exec -it nes-build /bin/bash# 创建用户 cmd:idARG USERNAME=ospreyARG USER_UID=1000ARG USER_GID=$USER_UIDRUN groupadd --gid $USER_GID $USERNAME \&& useradd --uid $USER_UID --gid $USER_GID -m $USERNAME \&& apt-get update \&& apt-get install -y sudo \&& echo $USERNAME ALL=\(root\) NOPASSWD:ALL > /etc/sudoers.d/$USERNAME \&& chmod 0440 /etc/sudoers.d/$USERNAMERUN apt-get update# for cmd: add-apt-repositoryRUN apt -y install software-properties-common dirmngr apt-transport-https lsb-release ca-certificatesRUN add-apt-repository ppa:xmake-io/xmake -y && apt-get update && apt-get install -y xmakeRUN apt-get install -y libsdl2-devRUN apt-get install -y git make gcc# optionRUN apt-get install -y nano iputils-ping# setting the password of root to 123456RUN echo 'root:123456' | chpasswdUSER $USERNAMEENV HOME=/home/$USERNAMERUN mkdir /home/$USERNAME/workWORKDIR /home/$USERNAME/workRUN git clone https://gitee.com/Dozingfiretruck/nes && cd nes && xmake###########################################FROM ubuntu:18.04 as prod#设置时区ENV TZ=Asia/ShanghaiRUN ln -snf /usr/share/zoneinfo/$TZ /etc/localtime && echo $TZ > /etc/timezone# 创建用户 cmd:idARG USERNAME=ospreyARG USER_UID=1000ARG USER_GID=$USER_UIDRUN groupadd --gid $USER_GID $USERNAME \&& useradd --uid $USER_UID --gid $USER_GID -m $USERNAME \&& apt-get update \&& apt-get install -y sudo \&& echo $USERNAME ALL=\(root\) NOPASSWD:ALL > /etc/sudoers.d/$USERNAME \&& chmod 0440 /etc/sudoers.d/$USERNAMERUN apt-get updateRUN apt-get install -y p7zip-full libsdl2-devUSER $USERNAMEENV HOME=/home/$USERNAMERUN mkdir /home/$USERNAME/workWORKDIR /home/$USERNAME/workRUN echo "PS1='\[\e[0;33m\]\u@\h\[\e[0m\]:\[\e[0;34m\]\w\[\e[0m\]\$ '" >> /home/$USERNAME/.bashrcCOPY --from=0 /home/$USERNAME/work/nes/build/linux/x86_64/release/nes .COPY contra.nes .COPY SuperMarioBrosWorld.nes .#CMD ["~/work/nes contra.nes"]# run cmd:# docker run --name=nes-test --rm -it -v /tmp/.X11-unix:/tmp/.X11-unix -v /dev/snd:/dev/snd --privileged -e DISPLAY=unix$DISPLAY nes.osprey.io/nes-build-run /bin/bash -c "./nes contra.nes"
编译命令(前提是安装好docker,参考:docker通用安装使用指南-Ubuntu-树莓派5):
docker build -f nes-dockerfile -t nes.osprey.io/nes-build-run .摸鱼指令(nes-build-run 由前面的命令生成)
docker run --name=nes-test --rm -it -v /tmp/.X11-unix:/tmp/.X11-unix -v /dev/snd:/dev/snd --privileged -e DISPLAY=unix$DISPLAY nes.osprey.io/nes-build-run /bin/bash -c "./nes contra.nes"如果有新的 nes 游戏,可以拷贝到容器中后,再进入容器中运行该文件
docker cp xx.nes nes-test:/home/osprey/nes最后为了更好的摸鱼,可以配合vscode使用,随时随地打开模拟器摸鱼,爽歪歪。
ubuntu18 以下版本只能下载v1.85的deb 文件,最新版本安装不了(其他版本安装最新的vscode就行):
https://update.code.visualstudio.com/1.85.2/linux-deb-x64/stable安装deb文件
sudo dpkg -i code_1.85.2-1705561292_amd64.debvscode打开 nes,
# forkr from https://gitee.com/Dozingfiretruckgit clone https://gitee.com/embeddedosprey/nes -b docker# docker 分支目前含有编译好的镜像 nes-build-run 565M,直接使用 load 命令导入即可code nes# 如果是自己导入的镜像,可能需要需要修改一下镜像名称
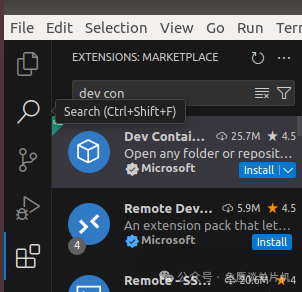
安装插件 Dev Containers
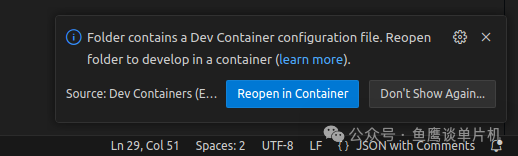
右下角点击重新打开 Reopen in Container(如果没有,可以通过 ctrl + shift+p,输入 rebuild)

容器内执行命令
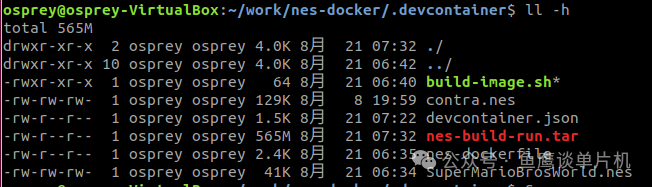
导出镜像:
docker save nes.osprey.io/nes-build-run > nes-build-run.tar在虚拟机的代码仓库.devcontainer里面导入镜像:
docker load < nes-build-run.tarnes C语言模拟器开源仓库地址:
https://github.com/Dozingfiretruck/nes
https://gitee.com/Dozingfiretruck/nes
魂斗罗 nes 下载参考链接
https://www.fcnes.com/fc/act/38.html#downadress
