


UC3842,TL494、SG3525是早期设计开关电源非常经典的三款PWM控制芯片,以前介绍过峰值电流模式单端输出脉宽控制器UC3842,主要应用于反激、正激等单端变换器,就是变压器的磁芯工作在磁化曲线的第1相限。半桥、全桥及推挽变换器的变压器的磁芯在正、负半周期分别工作在磁化曲线的第1相限与第3相限,因此,需要有双端输出PWM信号来控制两组开关管,达到调节输出电压的目的。这种双端输出脉宽控制器早期主要产品有TL494(TI公司)、SG3525(Motorola公司),其他芯片公司仿制生产TL494产品有许多派生选号,如CW494等,本文将介绍TL494。
1、内部基本结构
TL494 PWM控制器主要用于电压模式控制,其内部结构,测试电路及波形如图1所示。
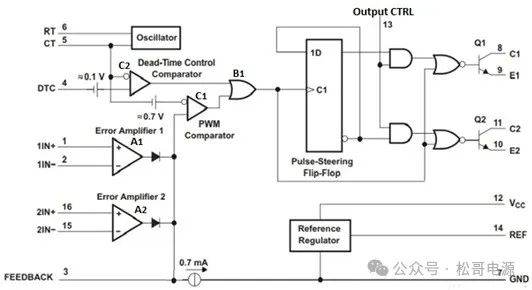
(a) TL494内部结构
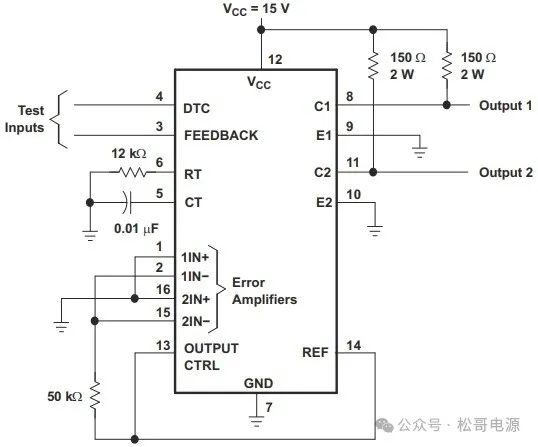
(b) 测试电路
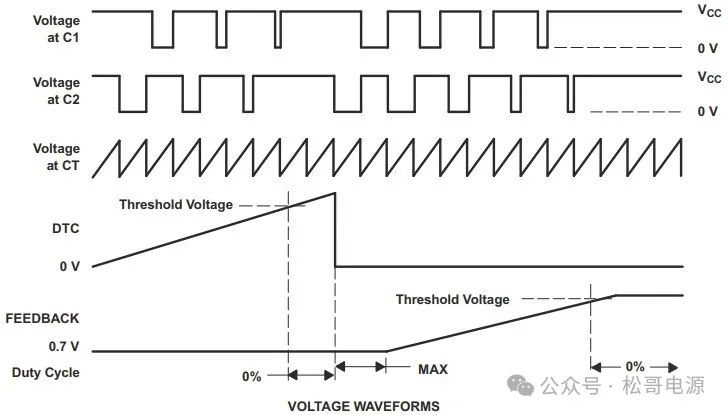
(c) 测试电路波形
图1 TL494内部结构、测试电路及波形
2、管脚及封装
8个管脚的UC3842,DIP8、SO8、SOIC8这3种封装最为常用,如图2所示。
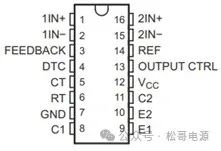
图2 TL494管脚
管脚1(1IN+):误差放大器1的同相输入端
管脚2(1IN-):误差放大器1的反相输入端
管脚16(2IN+):误差放大器2的同相输入端
管脚15(2IN-):误差放大器2的反相输入端
管脚8(C1):驱动三极管1(集电极)输出端
管脚11(C2):驱动三极管2(集电极)输出端
管脚5(CT):设置振荡器频率的外加电容端
管脚6(RT):设置振荡器频率的外加电阻端
管脚4(DTC):死区时间控制比较器输入端
管脚9(E1):驱动三极管1(发射极)输出端
管脚10(E2):驱动三极管2(发射极)输出端
管脚3(FEEDBACK):反馈输入端
管脚7(GND):接地
管脚13(OUTPUT CTRL):单端/并行输出或推挽模式选择输入端
管脚14(REF):内部5V基准电压输出端
管脚12(Vcc):芯片供电Vcc电源
3、工作原理介绍
TL494内部功能包括:PWM输出逻辑电路,锯齿波振荡器,死区时间比较器与PWM比较器,误差放大器A1和A2,内部基准电源等。
(1)PWM输出逻辑电路
PWM输出逻辑电路包括:1个或门B1,1个触发器D,2个与门,2个或非门,2个输出驱动三极管Q1和Q2。
管脚13为OUTPUT CTRL,连接到接地端(管脚7)时,2个与门输入端被封锁,2个与门输出都是低电平,2路驱动输出端完全由PWM比较器和死区时间比较器的输出来控制,这样2路驱动输出端是同步工作模式,TL494 以单端或并行模式运行。
若管脚13连接到 VREF (管脚14)时,此时,两路输出分别由触发器的同相输出端Q及反向输出端/Q控制,为双端输出方式,两路驱动输出端,即Q1与Q2的发射极输出(管脚9与10的输出信号),其相位关系是具有一定死区时间的互为倒相的信号,TL494 以正常的推挽模式运行。
(2)振荡器电路
TL494的振荡频率由外接元件RT(管脚6)、CT(管脚5)确定的锯齿波振荡器来设定,其振荡频率为:
通常,RT=5-100kΩ,CT=0.001-0.1uF。
例如:振荡器的振荡频率设置为20kHz,选取CT=0.001uF,计算RT为:

(3)死区时间比较器C2和PWM比较器C1
死区时间比较器C2的反相输入端直接与振荡器的锯齿波输出信号相连,同相输入端的内部串联0.1V的失调电压,然后连接到死区时间控制输入端(管脚4)。0.1V的失调电压限制输出的最小死区时间占一个锯齿波周期的4%,管脚4外加电压控制死区时间的设定。
VCC=15V时,外加死区时间控制电压和振荡器工作频率的占空比关系,如图3所示。
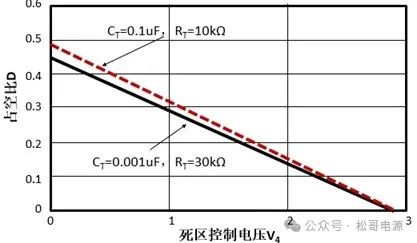
图3 死区时间控制电压与占空比关系
PWM比较器C1的反相输入端内部串联0.7V的失调电压,然后再连接到振荡器的锯齿波输出信号,同相输入端是两个误差放大器的公共反馈输出端(管脚3),0.7V的失调电压保证输出尽可能大的PWM脉冲宽度。
若管脚13与管脚14相连接,TL494设置为双端输出工作模式,死区时间控制端(管脚4)电压为固定电压V4,即死区时间td固定,误差放大器输出端(管脚3)电压为某一个电压V3时,内部对应的工作波形与输出波形,如图4所示。
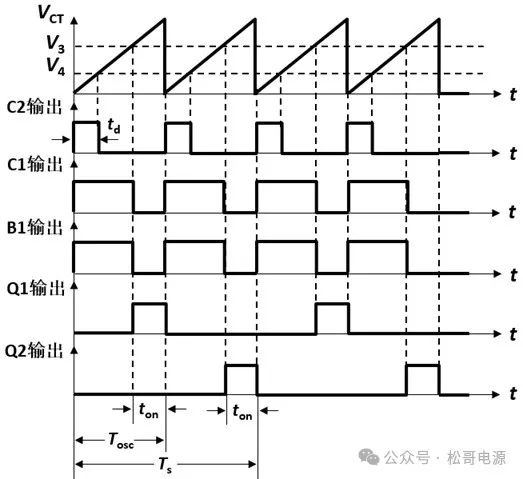
图4 TL494内部工作波形
输出脉冲宽度调制由电容CT两端的正向锯齿波与另外两个控制信号进行比较后完成,当管脚3的电压V3高于振荡器的锯齿波电压时,PWM比较器C1输出为高电平(1),两个输出的或非门被封锁,Q1、Q2输出都是低电平(0)。
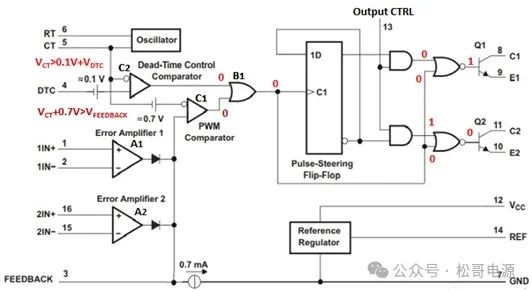
图5 驱动管Q1导通

图6 驱动管Q2导通
只有当锯齿波电压VCT高于管脚3和管脚4的输出电压,死区时间比较器C1和PWM比较器C2 输出都是低电平(0),或门B1输出为低电平(0),触发器输出端控制的两个或非门才有可能输出高电平(1),从而控制驱动三极管Q1和Q2导通输出信号;这时候,Q1和Q2哪一个导通输出信号,就取决于触发器的输出状态。触发器的输出端Q为低电平(0),Q1导通;/Q为低电平(0),Q2导通。
改变管脚4的电压V4可以改变死区时间td,改变管脚3的电压V3可以改变输出的脉冲宽度,V3电压越高,脉冲宽度越小,脉冲宽度可以调节范围是锯齿波周期Tosc与死区时间td之差。脉冲宽度就是主开关管导通时间ton。在双端输出工作模式下,主电路的工作周期是2倍的锯齿波振荡周期,即:Ts=2·Tosc。
(4)软起动和死区时间设定电路
改变死区时间控制端(管脚4)的电压V4,可以改变死区时间的大小。在一些应用中,需要加大死区时间,通过外加的电路就可以实现。例如,通过设定管脚4的控制电压V4,调整全桥变换器上、下桥臂开关要求的死区时间,满足系统的要求。另外,可以在管脚4外加正弦半波信号,幅值在0-3V之间变化时,输出脉冲宽度就按正弦脉宽调制薄即SPWM波形变化,通过同步逻辑控制信号,就可以使用TL494设计单相SPWM调制器波形,如图7所示。
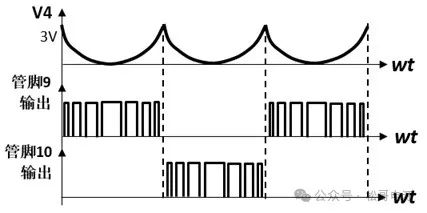
图7 TL494管脚4电压与输出SPWM波形
同样,可以利用改变死区时间控制端(管脚4)的电压V4改变输出脉冲宽度的特性,实现主电路软起动功能。整个主电路在上电的过程中,功率变换部分才开始工作,输出电压以及电流反馈信号还没有建立,或者非常低,管脚3的电压V3非常低,TL494的脉冲宽度会达到最大,反馈调节回路或保护电路单元还没有进入正常准备好的工作状态,主电路可能产生过大的电流或电压,影响系统的安全。通常,期望在系统上电的过程中,控制器自动限制输出脉冲宽度,开始时脉冲宽度小,然后逐渐增加,慢慢进入正常工作。脉冲宽度由窄逐渐加大,慢慢进入正常工作的过程称为软起动。
半桥或全桥变换器的上、下桥臂驱动脉冲之间的死区时间,要根据开关元件的开关特性以及电路的特点来设置。软起动电路通过负斜率波形加到死区时间控制输入端(管脚4),同时进行软驱动和死区时间设定的电路,如图8所示。
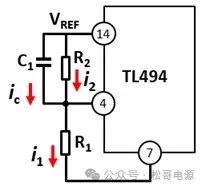
图8 软驱动和死区时间设定的电路
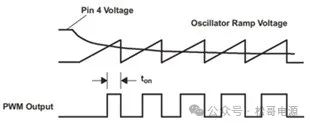
图9 软驱动时间设定波形
当TL494的基准电压建立后,其通过电阻R1、R2对电容C1充电,电阻R1的电压等于管脚4的电压V4:
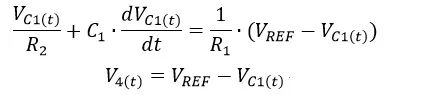
解得:

其中:
当t=∞时,
系统上电后刚开始对电容C1充电时,V4电压等于基准电压VREF,为5V;然后,随着电容通过R1进行充电,电容电压V4按指数函数规律衰减输出脉冲宽度缓慢增加,直到控制环路起作用,接管控制。当充电的时间足够长、完全稳定后,V4电压为R1和R2的分压。使用上面二个公式设计电路参数,基准电压VREF=5V,V4=3V,占空比为0,锯齿波的最高电压为3V,此时,TL494内部失调电压0.1V锁定最小死区时间是4%。
根据振荡器电容CT锯齿波电压波形,可以推出死区时间在振荡周期的占比与死区控制电压V4关系:

当V4=0.1V时,D=0.04;当V4=3V时,D=0.96,解得:

根据开关元件开关特性、主电路的结构和工作频率,选取要求的死区时间,计算死区时间在振荡周期的占比,代入上面公式,就可以计算出V4电压值。例如:锯齿波频率为40KHZ(周期为25uS),死区时间为2uS,死区时间占比为0.08,V4=0.226V。
根据V4电压值,根据公式,计算出电阻R1和R2值。然后,再根据主电路要求的软起动时间t0,RC电路在2.3倍时间常数后就达到稳定,所以,软起动电容值为:
软起动时间通常设定在25-100个开关周期范围内,例如:锯齿波频率为40KHZ(周期为25uS),主电路开关频率为20KHZ,软起动时间设定为50个开关周期,软起动时间为:50*50uS=2500uS。
当R1:R2=1:9时,软起动结束后,V4=0.1*5V=0.5V,死区时间为4uS。取R1=100K,R2=900K,软起动电容值C1为:

(5)误差放大器
TL494内部有两个误差放大器A1和A2,两个误差放大器输出分别通过二极管之后接到公共的反馈输出端(管脚3),应用中将相关反馈信号接到这些管脚,通过调节每个脉冲的占空比来稳定输出电压或进行各种保护。两个误差放大器输出分别通过二极管之后接到公共的反馈输出端,相当于“线或”逻辑功能(只要其中一个为高电平,输出就为高电平,即:只能其中一个工作,另外一个不工作,不能二个同时工作),如图10所示。因此,两个误差放大器具有一个优先问题,不能同时都作为调节作用,只能一个作为调节,另外一个作为保护使用。

图10 两个误差放大器输出"线或"
改变误差放大器输出端(管脚3)电压,就可以改变输出脉冲宽度,V3电压越高,脉冲宽度越小,TL494双端输出工作模式的一个输出端,其脉冲宽度可以在锯齿波周期TOSC和死区时间TD之间调节,脉冲宽度在0-TOSC-TD之间变化,如果死区时间控制端(管脚4)外加有电压V4,对应的死区时间为TD1,那么,脉冲宽度在0-TOSC-TD1之间变化。实际的脉冲宽度由管脚3的电压V3进行控制。两个误差放大器的输出分别通过正向二极管连接到公共端管脚3,因此,误差放大器输出正电压才能起到调节作用,两个误差放大器不能同时进行调节。采用TL494的变换器,如果要实现电压电流的双环调节,必须将电压外环在外部设置、调节后作为电流内环的给定,与输出(输入)电流反馈信号比较,然后,利用内部的一个误差放大器进行调节,另一个误差放大器可以用作过流保护或其它保护。
输出电压调节
例如:输出电压为5V,通过R1、R2分压电阻网络,取出输出电压反馈信号,连接到TL494的管脚1(内部误差放大器的同相输入端),TL494的基准电压通过R3、R4分压电阻网络,得到2.5V,连接到TL494的管脚2(内部误差放大器的反同相输入端),加上放大倍系数调节的电阻R5、R6,就构成输出电压反馈调节,如图11、图12所示。
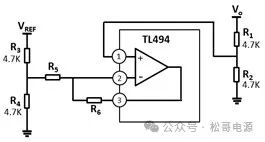
图11 电压反馈电路
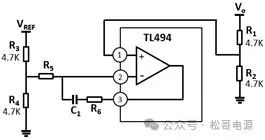
图12 RC电压反馈电路

若R1=R2=R3=R4=4.7K,代入:

输出电流调节
在一些工业电源,如电镀、逆变电焊机等,需要对输出电流做恒流调节,电流反馈调节电路如图13所示。输出电流通过取样电阻Rs采样,采样得到的电流检测电压为:Vs=-Rs·Io,其经过低通滤波后送到误差放大器A2的反相端管脚15,与电流给定的参考电压信号一起进行调节,误差放大器A2的同相端管脚16通过一个电阻接地。
当输出负载电流较小远低于电流设定值时,TL494的管脚15的电压V15为正值,经误差放大器A2放大后,A2输出为负值,对PWM比较器不起作用,输出脉冲宽度由死区比较器C2或误差放大器A1输出进行控制。
当输出负载电流变大,电流检测信号的电压绝对值增加,输出负载电流增加到一定值时,V15变为负值,经误差放大器A2放大后,A2输出为正值,PWM比较器由A2输出进行控制,输出脉冲宽度受输出负载电流的影响进行调节。当输出负载电流达到电流设定值时,误差放大器A2进入动态平衡,管脚3的电压V3维持恒定的正值不变,输出脉冲宽度也保持不变。
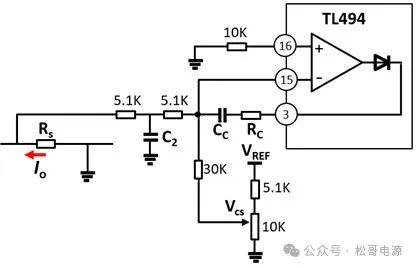
图13 电流反馈调节电路
TL494的管脚15的电压V15为:

其中,VCS为通过VREF与可变电阻器设定的输出电流的参考电压。
若V15电压小于0:

得到:
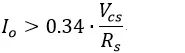
当Vcs、Rs确定后,只要Io大于设定值,就可以使V15<0。
过流保护
TL494的基准电压通过R7、R8分压电阻网络,得到1V,连接到TL494的管脚15(内部误差放大器的反同相输入端),电流检测电阻的电压信号连接到TL494的管脚16(内部误差放大器的同同相输入端)。
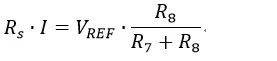
若R7=4K,R8=1K,得到:
如果过流保护的值为10A,那么,电流检测电阻值为:
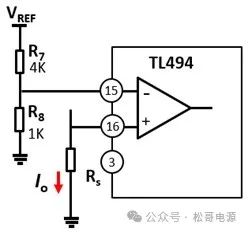
图14 过流保护电路
电流检测可以使用取样电阻、电流互感器或其它电流检测器件。通常,电流取样电阻串联在输出回路、或输入回路,分别检测输出电流或输入电流。同样的过流保护值,电阻R7、R8分压获得的电流保护基准电压越小,电流取样电阻阻值越小,功耗越低;但是,电流取样电阻串联在主功率回路,容易受到共模干扰,影响检测精度,因此,电流保护基准电压也不能太低,需要在检测精度和功耗之间进行折衷处理。
参考文献:TL494数据表
