


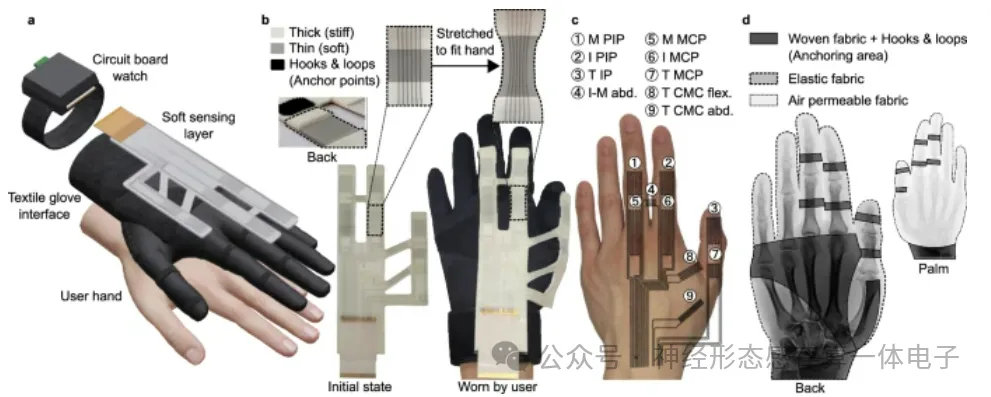
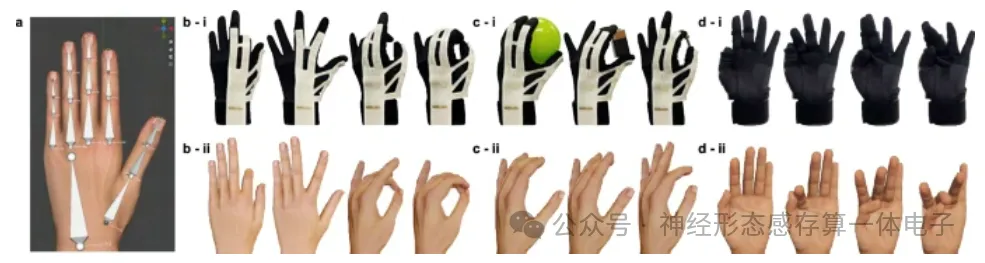
研究人员提出了一种紧凑的可穿戴手套,能够通过简单的基于拉伸的传感机制估计佩戴者的指骨长度和关节角度。软感应手套的设计易于拉伸,适合所有人,既可以测量手的大小,也可以估计拇指、食指和中指的手指关节运动。
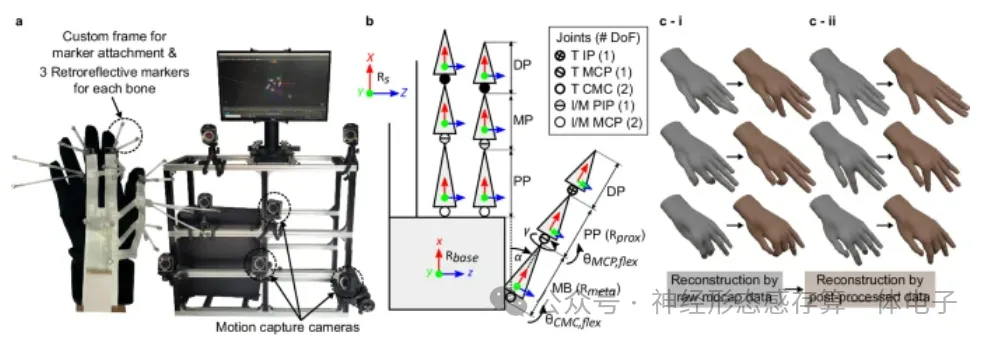
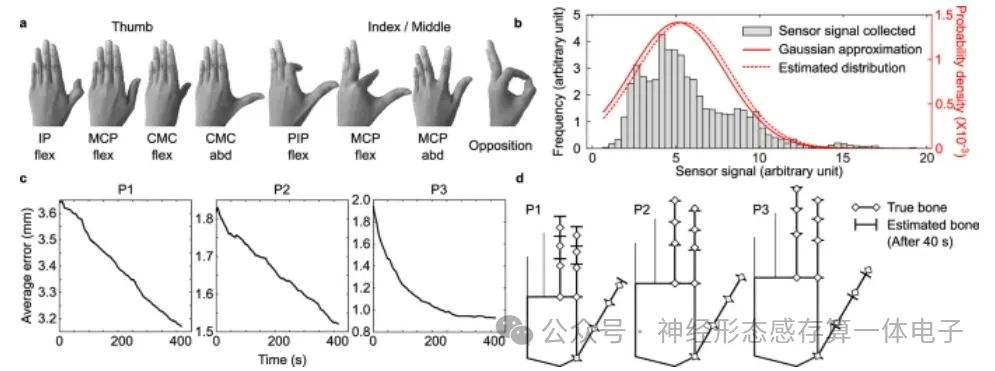
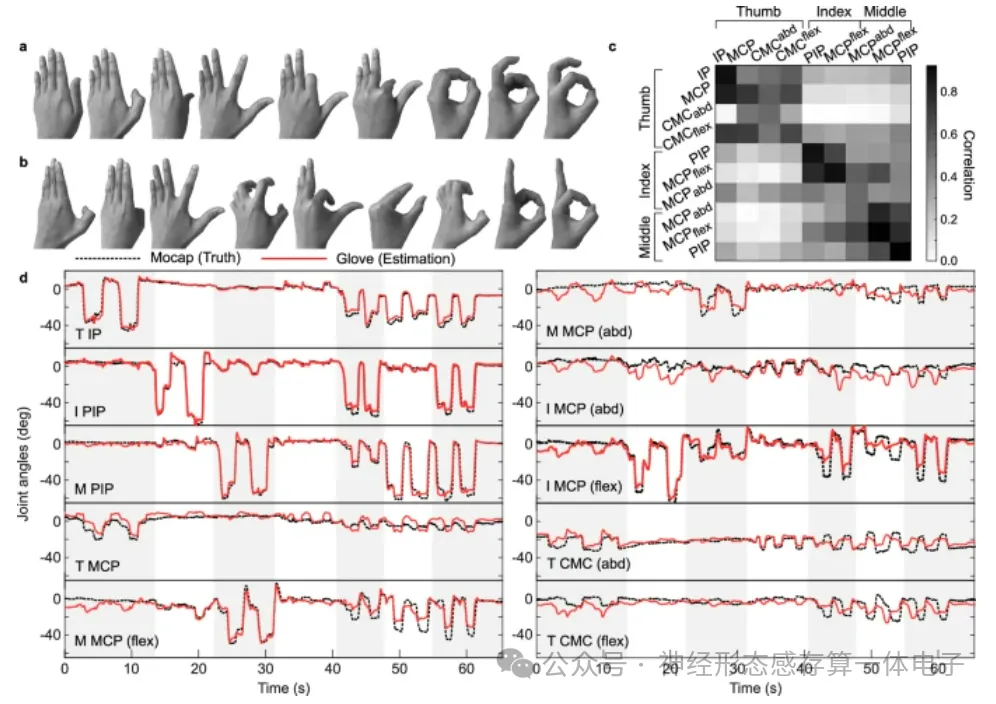
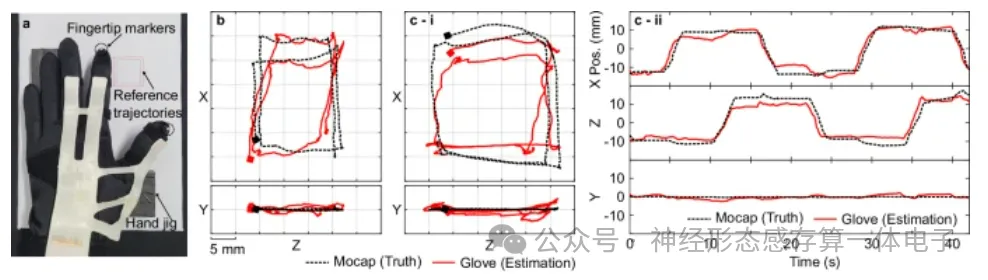
该系统使用全面的手部运动数据进行了校准和评估,这些数据反映了人类手部自然运动和各种解剖结构的广泛范围。数据是通过自定义运动捕捉设置收集的,并通过后处理方法转换为关节角度。手套系统能够准确且稳健地重建任意甚至非传统的手部姿势,这一点通过对骨长度(平均误差:2.1 mm)、关节角度(平均误差;4.16°)和指尖位置(平均3D误差:4.02 mm)的估计以及各种应用中的整体手部姿势重建的评估得到了证实。
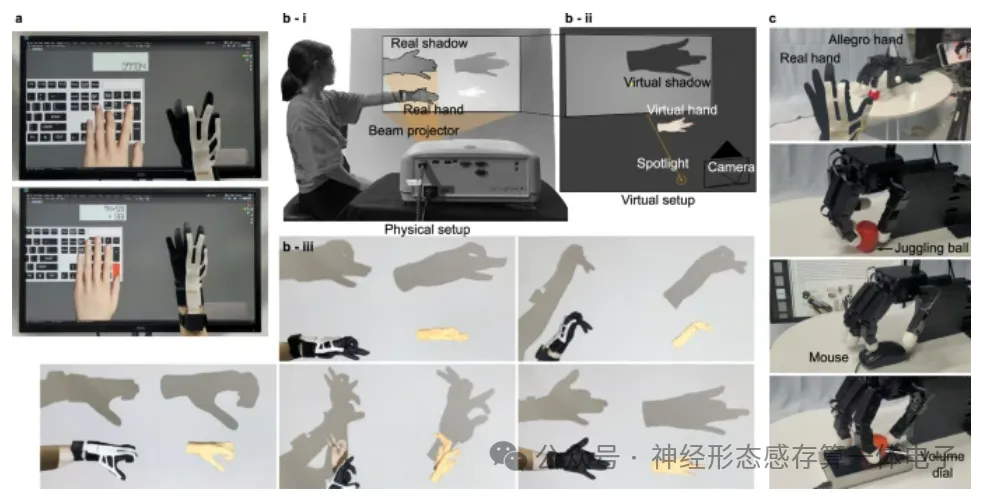
可穿戴手套能够利用人手的灵巧性进行潜在的应用,包括但不限于拟人机器人手或手术机器人的远程操作、虚拟和增强现实以及人类运动数据的收集。相关研究成果以“Stretchable glove for accurate and robust hand pose reconstruction based on comprehensive motion data”为题发表在国际顶级期刊Nature Communications上,韩国首尔国立大学 Yong-Lae Park教授、延世大学Sumin Helen Koo教授为论文的共同通讯作者。
灵巧性和多功能性,人类手与动物手的明显区别,允许从抓握到手部操纵,甚至使用手势进行交流的无数功能。因此,手关节的跟踪和重建是一个热门的研究课题,具有众多应用,包括机器人、医疗保健、游戏、虚拟和增强现实。
然而,在估计手部运动方面存在许多挑战,因为人手是一个具有许多自由度的复杂身体部位,并且个体之间存在很大差异。许多先前的研究已经证明了手部姿势的分类和重建,尽管范围有限,但对手部运动跟踪提供了部分评估,仅涉及手指运动全范围的一部分、受限的手部位置或仅限于少数一般手部姿势。
这样的性能可能不足以满足应用,例如手术机器人的远程操作、拟人机器人手的控制和临床分析,这些应用需要指尖的精确定位和手的详细姿势。为了复制这些手部动作,必须识别手部结构,这可以通过运动学结构和关节运动来表征。因此,准确量化和测量这两个组成部分具有重要意义。
为了量化关节运动,之前的研究采用了应变/弯曲传感器、编码器或惯性测量单元来直接测量关节角度或骨骼旋转。其他人还利用摩擦电纳米发电机来检测手部运动的电荷产生,或启动传感骨传导方法来分析穿过骨骼的机械波。作为对应物,视觉或磁性传感器已被用于跟踪手的特定特征,如指尖。
通过正向运动学或反向运动学模型,结合运动学结构,使用这些方法中的任何一种测量的量来重建手部配置。为了识别运动结构,基于视觉的技术已被广泛使用。然而,这些方法需要高度受控的设置,并且容易受到相机方向和遮挡的影响,限制了佩戴者在各种环境中的自由手运动。其他研究已经手动测量了骨长度,但这种方法的结果在很大程度上取决于检查者的专业知识。

为了缓解这些问题,一些研究提出将复杂的运动学约束应用于手部运动。然而,这种方法需要大量的计算,并可能无意中排除潜在的解决方案。虽然其中一些问题可以通过集成多种传感机制来解决,但这种方法通常会导致系统体积庞大、限制性强,可穿戴性降低。因此,仍然存在对一种手部跟踪系统的巨大需求,克服系统在精度、鲁棒性和可穿戴性方面的局限性。

研究人员提出了一种可穿戴手套,能够通过单一传感机制高精度地实时估计佩戴者的指骨长度和关节角度。手套系统使用反映人类手部各种自然运动的综合手部运动数据进行校准和评估。系统能够重建复杂和非传统的姿态,使其适用于各种应用。



