点击蓝字 关注我们
🎁下载安森美(onsemi)系统方案指南合集赢京东卡。
👉图像传感器
物理参数:
分辨率:每帧或每幅图像的信息量等于水平像素数乘以垂直像素数。对于机器视觉应用而言,并不需要像消费级相机那样的极高分辨率,因为过高的分辨率会增加对传感器和图像处理器带宽的需求,从而导致系统成本的无谓增加。用户应当根据扫描对象的特性及对象上的光照量来选择合适的分辨率。
光学格式:确保镜头聚焦光线的投影与传感器的像素阵列相匹配,以便完全覆盖传感器,充分利用其分辨率。
长宽比:根据目标视场的布局选择最适宜的长宽比(如1:1、3:2等),避免购买超过实际应用所需的分辨率。
帧率:当目标快速移动时,需要足够的每秒帧数来捕捉并“冻结”运动,同时跟上成像的物理空间。但如同分辨率一样,帧率也只需满足解决问题的最低需求即可。
动态范围(DR):由满阱容量和读取噪声等因素决定的动态范围,表示的是最大信号与最小信号之间的比率。动态范围越大,传感器越能精确捕捉应用场景中从明亮到阴暗的细节变化。
图1.图像传感器
👉竞争优势
安森美的图像传感器在恶劣光照条件下的动态范围表现优异,这得益于其全像素架构设计,使得传感器在各种光照条件下,包括低光环境,都能保留更丰富的细节。其可扩展的产品系列有助于降低系统开发的成本和时间。
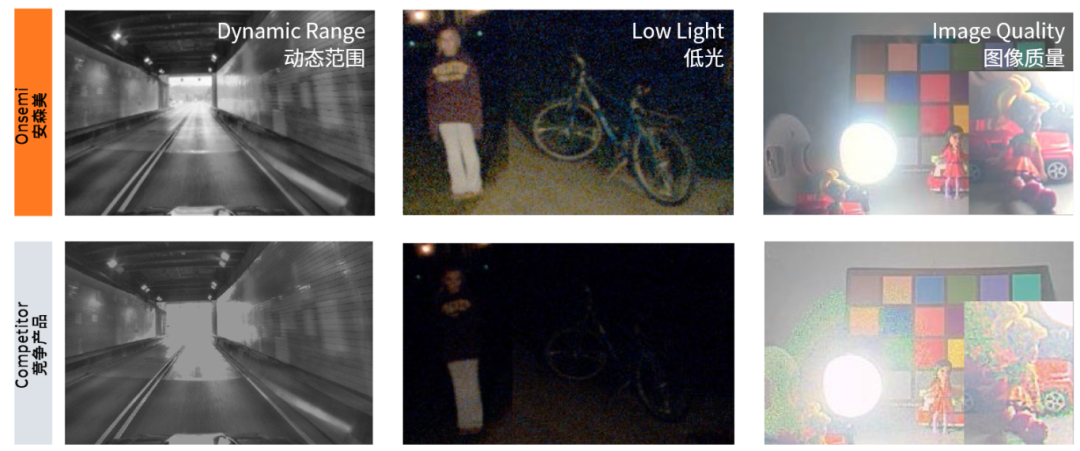
图 2:安森美在图像质量方面的优势
👉图像传感器
光学参数:一些看似需要彩色的应用实际上可以通过单色方案以更简单、更经济的方式解决。无论何种情况,基于硅的每个像素都会将光(光子)转化为电荷(电子)。每个像素阱所能处理的最大电荷量有限,一旦超过就会发生饱和。每次曝光后,每个像素中的电荷程度与照射到该像素的光量相关。
卷帘快门与全局快门:当前大多数传感器都支持全局快门,即所有像素行同时曝光,从而消除运动引起的模糊。但是,实现全局快门所需的传感器上电子器件会增加一定的成本,因此对于某些应用来说,使用卷帘快门传感器仍然是有意义的。
像素大小:物理像素越大,所能接纳的光子就越多。一般来说,倾向于使用大像素。但这样一来,就需要耗费更多的硅面积来支持所需的 x x y (x by y)阵列以实现相应的分辨率,并且需要更大的光学系统,进而导致物料单成本上升。另一方面,非常小的像素需要复杂的光路设计才能实现良好的光学分辨率。
输出模式:在全分辨率下,每个传感器通常都有一个“标准”预期输出,但许多传感器还提供额外的可切换输出模式,如感兴趣区域 (ROI)、像素合并或抽取。此类模式通常以更高的帧率读取部分像素,使得同一传感器和摄像头可以服务于两个或更多用途。显微镜应用就是像素合并的一个例子,它使用高速的像素合并图像来定位大视野中的目标斑点,然后切换到全分辨率以获得高质量的细节图像。
👉图像传感器特性 - 全局快门 vs 卷帘快门
光学传感器可用于深度感知、环境中的定向和交互。它是唯一能够检测颜色的传感器方案。采用全局快门的图像传感器同时存储整个图像中的像素数据,而没有运动伪影,因此非常适合用在四处移动时。卷帘快门传感器具有更高的动态范围,因此可以在较差的照明条件下更好地工作。
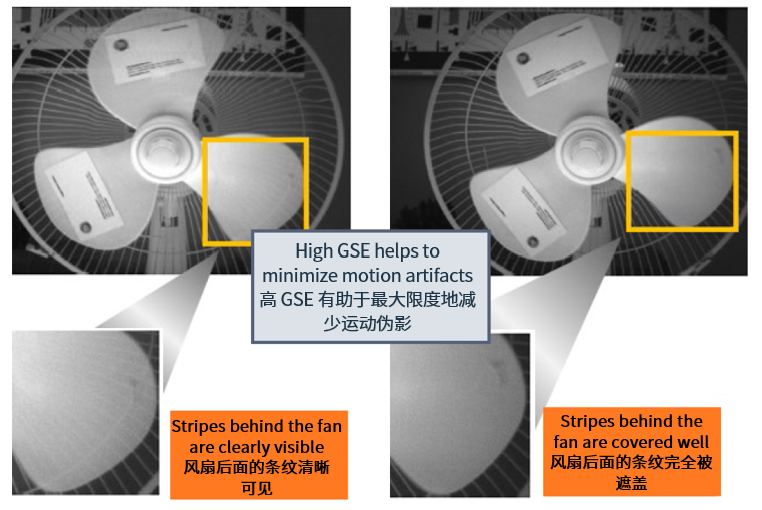
图 3:全局快门效率比较示例
全局快门在捕捉运动场景方面具有优势,并且能为开发者和制造商带来其他好处。
最大限度地减少运动伪影:这是全局快门的一个主要优势。全局快门传感器一次可以捕获整个图像,因此避免了卷帘快门图像中可能出现的失真和伪影,尤其是在捕捉快速移动的物体时。
优势:
每个 ROI 都有统计引擎
控制和适应动态照明条件
精准照明和 ISP 同步
成像系统易于开发,缩短产品上市时间
👉深度感知 – 激光雷达
激光雷达(光检测和测距)在许多机器视觉方案中发挥着至关重要的作用,与传统摄像头相比具有明显的优势。它可用于单点、2D 或 3D 监测。激光雷达使用激光器,激光器发射短脉冲。短脉冲经物体反射,返回到光电探测器,基于传输时间来测量距离。重复此过程即可获得周围区域的准确表示。激光雷达使用红外光发射器,因此可以在所有光照条件下使用。
3D 绘图:激光雷达传感器发射激光脉冲并测量脉冲反射回来所需的时间,从而能够创建高度精确的环境 3D 地图。
稳健运行:激光雷达在各种光照条件下都能有效工作,包括黑暗、烟雾和雾霾等,而摄像头在这些条件下难以发挥作用。
高精度:激光雷达测量精度非常高,尤其是对于较远距离的测量,超出了大多数摄像头的能力。
快速输出:快速输出是安森美 SiPM 传感器的一大特性,它能实现短脉冲宽度和极快的信号上升时间。它可用于超快速计时和提高计数速度。
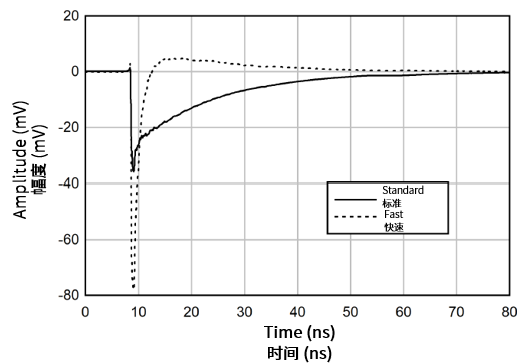
图 4:安森美 SiPM 的快速输出模式
ArrayRDM-0112A20
12 SiPM 像素阵列,共阳极
无快速输出
微单元有效面积:20x20 µm PDE @ 905nm 16%
微透镜技术可实现最大光学效率
建议 Vop 30V

MicroFC-100
1x1 mm SiPM,适用于单点或 2D 激光雷达
标准和快速输出
可见光范围中灵敏度最高
PDE @ 420nm >18% - 取决于微单元尺寸
建议 Vop < 30V
微单元尺寸:10、20 或 35 µm
框图 - 工业激光雷达
激光器通常是脉冲式,因此电源需要具有快速响应和良好的瞬态恢复能力。
SiPM/SPAD 传感器在盖革模式下运行,具有更高的灵敏度和增益。需要一个升压转换器来将器件偏置到 25V 至 30V。SiPM 可以正偏或负偏,更多细节请参阅安森美 SiPM 传感器的偏置和读取。
发射器和接收器具有光学接口或机械接口,用于引导/扫描视场 (FOV) 范围内的能量。
来自传感器的信号需要放大和辨别(比较器)。
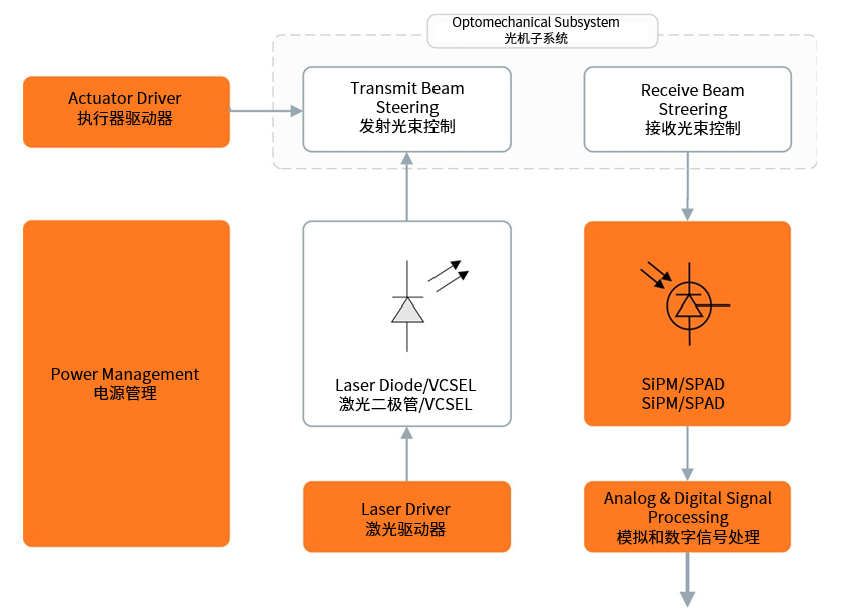
图 5:采用安森美器件的工业激光雷达框图
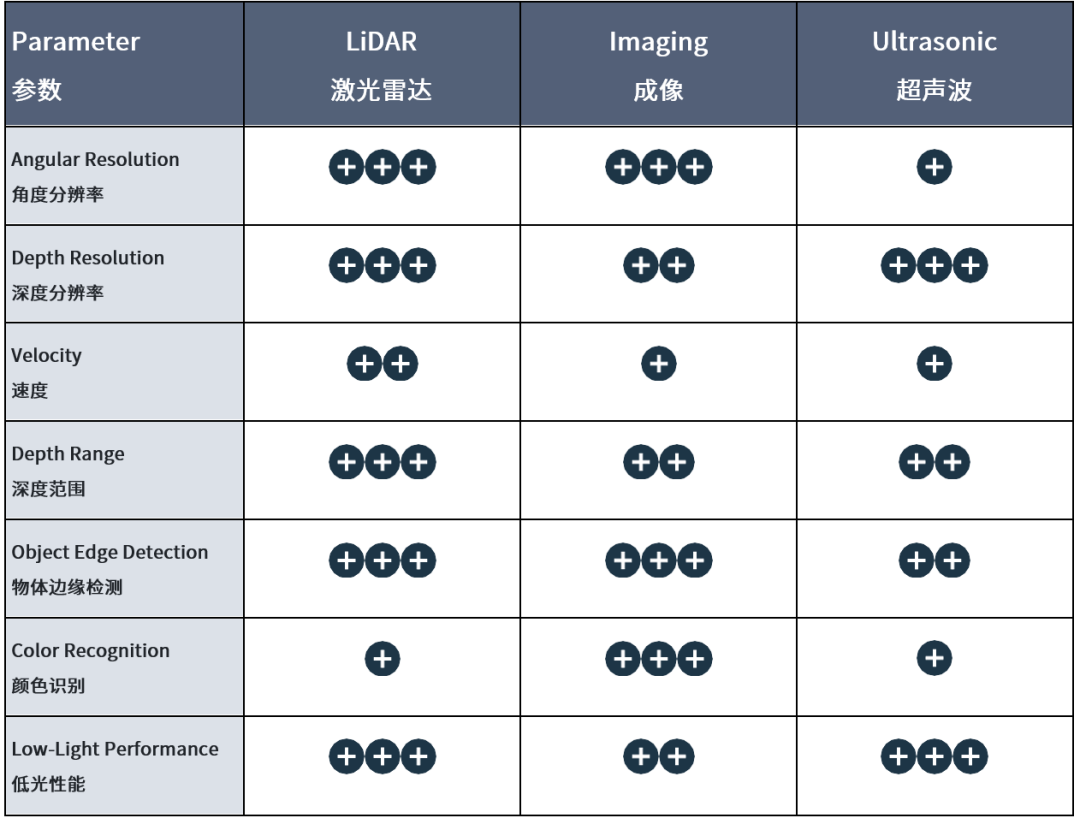
👉自主传感器模式 - 深度感知比较表
在工业机器视觉中,传感器的选择合适与否取决于具体任务。
图像传感器具有高角度分辨率和物体边缘检测能力,在详细视觉分析方面表现出色,但在深度感知方面和低光环境下表现较差。
激光雷达在 3D 应用中大放异彩,具有出色的深度分辨率和范围,但缺乏颜色识别和速度检测能力。
超声波传感器具有优异的低光性能和近距离深度准确性,但角度分辨率和物体细节检测能力有限。
归根结底,应结合应用的需求与技术的优缺点来选择最合适的传感器。对于精细物体检测,图像传感器优势显著。对于精确的 3D 扫描/导航,激光雷达优势明显。为了在低光条件下实现高效简便的障碍物检测,超声波传感器是合适的选择。
表 1.不同机器视觉感知方案的比较
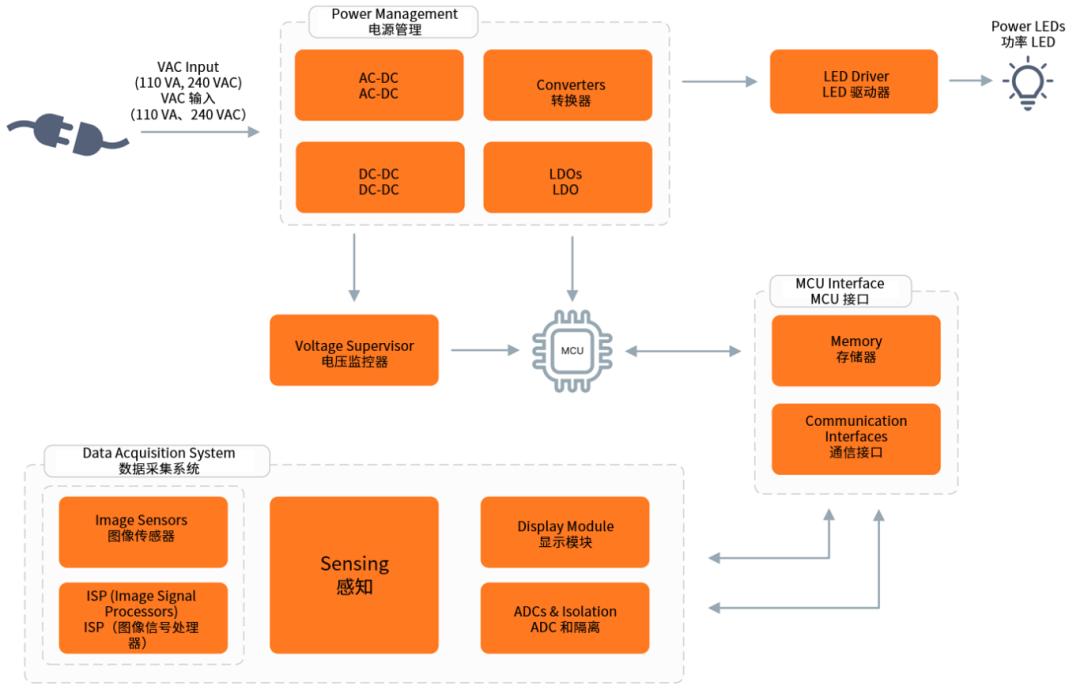
机器视觉 – 框图
下面的框图代表了安森美推荐的机器视觉方案。
大多数功能块器件可从安森美购得,如下面的器件表所示。
PYTHON 系列全局快门图像传感器是针对典型机器视觉应用(包括检查、跟踪、测量等)进行优化的产品线。该系列提供基于 4.5um 或 4.8um 像素的 8 种分辨率,从 VGA 开始,最高 2500 万像素。帧率为 >800fps 至 80 fps 不等,具体取决于分辨率。所有 PYTHON 器件都有独特的“二次方增速”特性,即帧率的增加取决于所读取的感兴趣区域的垂直和水平尺寸。PYTHON 有黑白、彩色和近红外增强三种版本,同时针对选定的分辨率提供多种速度和质量等级选项。
快速、多功能的全局快门图像传感器系列
关键特性
8 种分辨率,覆盖广泛的应用
在 ROI 读取的情况下,所有 PYTHON 系列器件都有“二次方增速”特性(在窗口的 x 或 y 减小的情况下,帧率也会增加)
先进的全局快门 CMOS 设计
多种分辨率和速度等级,提供经济有效的成像方案
方形和矩形长宽比,充分利用可用视场 (FOV)
高性能,低噪声,约 60 dB 动态范围
Hyperlux SG 是一款多功能摄像头,可用于多种用途,包括 AR/VR、机器视觉、条形码扫描和设备检查。它有许多非常适合这些应用的特性,包括:最大限度减少运动伪影的全局快门传感器、可编程的感兴趣区域 (ROI)、适应动态照明的自动曝光和控制、用于精确主动照明的触发和频闪控制,以及适用于电池供电设备的低功耗运行。今年将会推出更多具有出色特性的传感器。
ARX383 - VGA,1/8 英寸,120 fps
支持运动场景的高全局快门效率
内置自动曝光功能,用于应对不同的照明条件
小尺寸
可编程的感兴趣区域
触发模式和频闪控制

安森美的图像传感器系列(也称为 XGS)集高性能、紧凑像素和低功耗等特性于一体。它提供多种分辨率,从 230 万至 4500 万像素不等,适用于广泛的应用。传感器还采用全局快门设计,这意味着所有像素同时捕获光线,从而减少失真和卷帘快门效应。此外,传感器还有黑白和彩色两种选择。

出色的图像质量,原始图像无伪影/图案干扰
优异的电源效率(功耗比竞争产品低 2 倍)
高性能、低噪声 3.2 µm 像素
极好的尺寸-分辨率组合
29 x 29 mm 摄像头分辨率高达 16MP (1:1)
4k/8k 视频 @ 120/60 fps(12 位)(XGS8000 / XGS45000)
XGS X-Celerator
连接标准 FPGA 评估环境的接口
兼容 ANSI/VITA 57.1 FMC 标准
简化摄像头设计并缩短产品上市时间 (TTM)
提供相关的全套资料:X-Celerator
可用于 XGS 5000/12000/16000/45000

XGS X-Cube
XGS 传感器板(彩色或黑白),用于转换为 MIPI 输出的 FPGA 板
用于 Demo 3 / DevWare 接口的 IAS 模块柔性线缆
简化摄像头设计并缩短产品上市时间 (TTM)
可用于 XGS 5000/12000

🔔对机器视觉感兴趣的小伙伴,可扫码获取机器视觉系统方案指南完整版。第一部分请查看👉AI+机器视觉成趋势,图文详解N大应用场景

⭐点个星标,茫茫人海也能一眼看到我⭐