

研究背景
在现代科技时代,将传感功能集成到健康监测系统和机器人平台中已成为提高人类生活和工业效率的一种变革性方法。材料科学、电子工程和跨学科合作正在推动柔性电子技术的快速发展,与此同时,健康监测、人机交互、机器人等领域对可穿戴式触觉传感器的需求也在不断增长。这些应用场景要求触觉传感器具有高灵敏度和长期稳定工作能力。然而,驱动可穿戴传感器需要额外的电源,这会降低传感系统的灵活性,增加重量,从而降低佩戴体验。因此,从生物运动和环境中获取能量已成为替代传统电源的一种前景广阔的方法。特别是自供电触觉传感技术,由于能够通过将机械能转化为电能来产生自身的工作电源,因此在各种传感技术中脱颖而出。这对于需要连续运行的健康监测设备和自主发电对独立运行至关重要的机器人技术尤为重要。
触觉是人类感知世界的基本方式之一,而触觉传感器则是模仿人类触觉功能的人工设备,它们可以将机械刺激转化为电信号,从而实现对环境的感知和控制。随着技术的不断发展,自供电触觉传感器受到了广泛关注。这不仅是因为它们具有能源自主性,可大大降低能源短缺对设备使用的影响,还因为它们的触觉传感能力将实现更精细、更人性化的感知模式。因此,近十年来开发出了大量自供电柔性触觉传感器,并广泛应用于健康和运动监测机器人、生物医学等领域。触觉传感器的性能和可靠性取决于其传感机制和结构设计。摩擦起电式传感器和压电式传感器可通过采集机械能和检测动态压力实现自供电。电容式和压阻式传感器具有较大的动态和静态压力检测范围,但需要电源,从而增加了重量,降低了触觉传感系统的灵活性。尽管压阻传感器因其工作机制而需要外部电源才能工作,但通过与自供电电子元件相结合,它们可以实现自供电。
作为现代医疗保健的重要组成部分,健康监测的发展不仅促进了对最新数据的依赖,而且还需要管理和处理越来越多的数据。如何实时、准确、非侵入式地获取和处理数据已成为健康监测领域的一大挑战。自供电触觉传感器可以巧妙地集成到可穿戴设备中,对心跳、血压呼吸和运动等人体健康状况进行无创监测,这对长期健康管理和疾病预防至关重要。这也意味着需要确保传感器准确捕捉微弱的生理信号,这对确保监测数据的可靠性至关重要。此外,还需要高效的算法来处理和分析收集到的大量数据,从而提供实时、准确的健康反馈。传统的供电方法需要内置电池或频繁连接外部电源进行充电,这既增加了相关设备的重量和体积,也限制了设计的灵活性和持续的能源供应。因此,自供电传感技术的应用是克服这一障碍的有效手段。通过将人体肢体运动、心肺运动和血液流动产生的生物力学能量转化为电能,减少了对传统电池的依赖,提高了便利性,并使长时间监测成为可能。同样,现代机器人技术也面临着类似的挑战。随着机器人应用领域的扩大,对更精细的运动控制、感知以及在非结构化环境中对环境的理解提出了更高的要求。通过利用环境能源,这项技术有助于减少机器人对外部能源的依赖,提高机器人在无人环境中自主运行的能力。然而,在复杂的操作环境中,传感器必须足够耐用和可靠,以确保长时间稳定运行。自供电触觉传感器以其实时检测生理信号的独特能力满足了这些需求,为机器人技术的发展提供了新的动力。
过去几十年来,触觉传感技术在健康监测和机器人领域取得了长足的进步。与传统传感器相比,自供电触觉传感器无需外部电源驱动,使整个系统更加灵活轻便。因此,自供电触觉传感器是模拟可穿戴健康监测触觉感知功能的理想选择,也是智能机器人理想的电子皮肤(e-skin)。广东工业大学孙启军教授团队在这篇综述中首先介绍了各种自供电触觉传感平台的工作原理、材料和设备制造策略。然后介绍了它们在健康监测和机器人技术中的应用。最后,讨论了自供电触觉传感系统的未来前景。相关报道以“Recent Progress on Flexible Self-Powered Tactile Sensing Platforms for Health Monitoring and Robotics”为题发表在Small期刊上。
图文导读
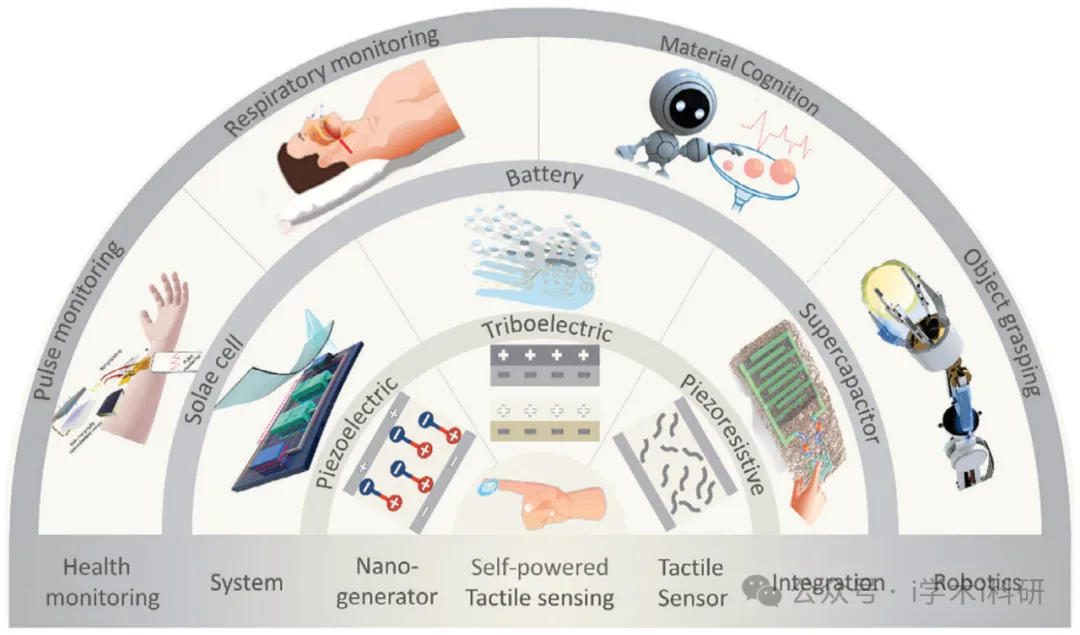
Figure 1. Overview of working mechanisms, system integration, and applications of self-powered tactile sensing.
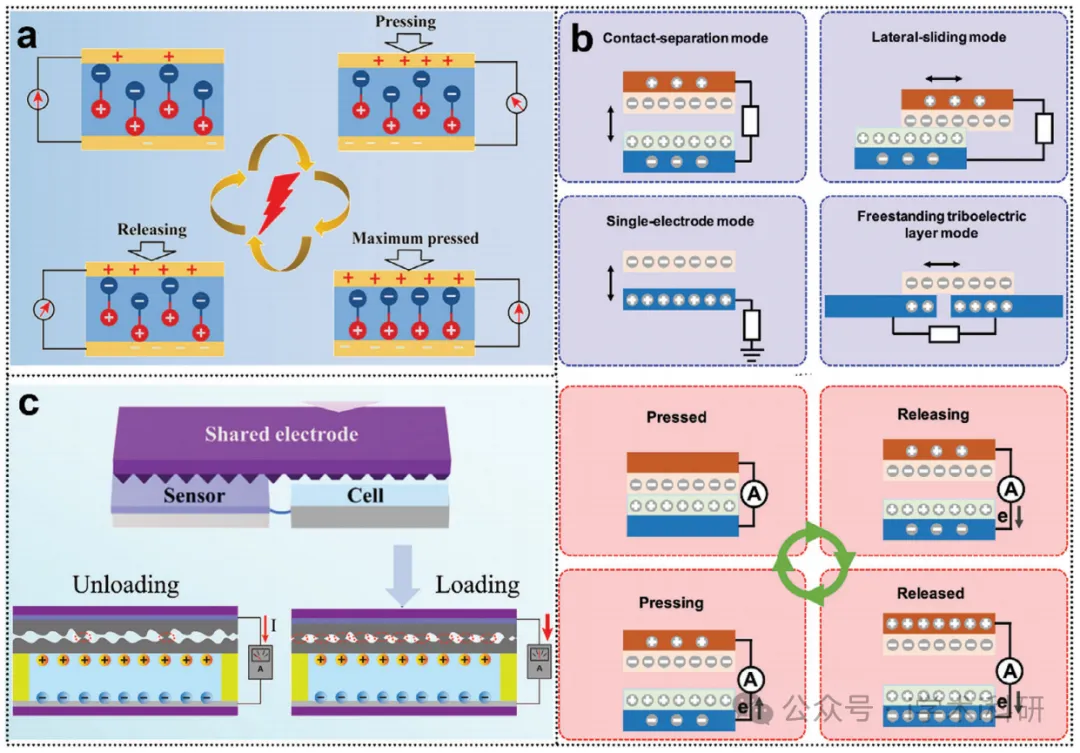
Figure 2. Working mechanism of self-powered tactile sensors.
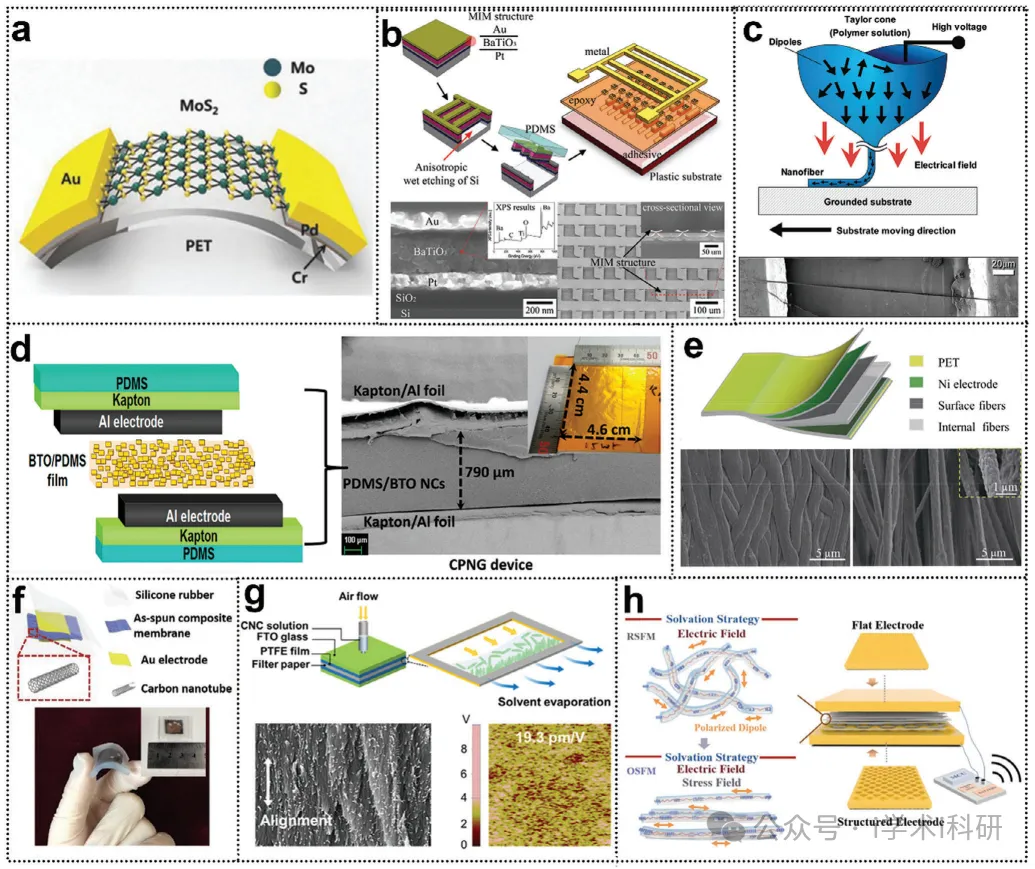
Figure 3. Materials and device structure of piezoelectric tactile sensors.

Figure 4. Materials and device structure of triboelectric tactile sensors.

Figure 5. Materials and device structure of piezoresistive tactile sensors.
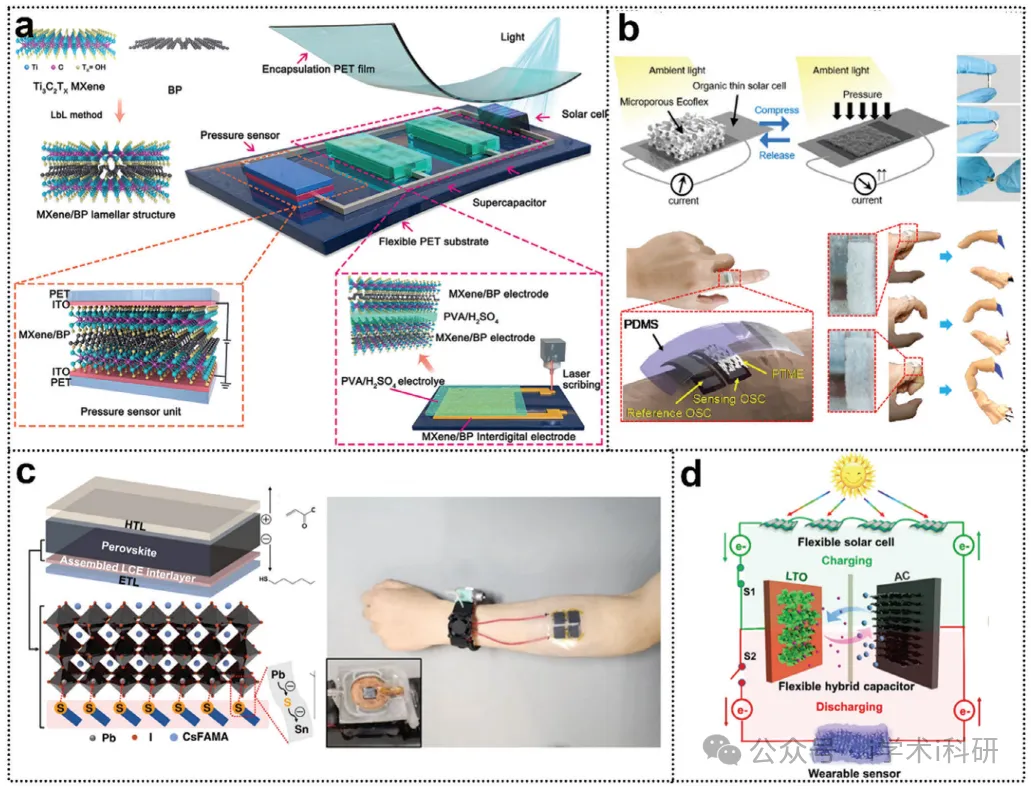
Figure 6. Self-powered tactile sensing systems combined with solar cells.
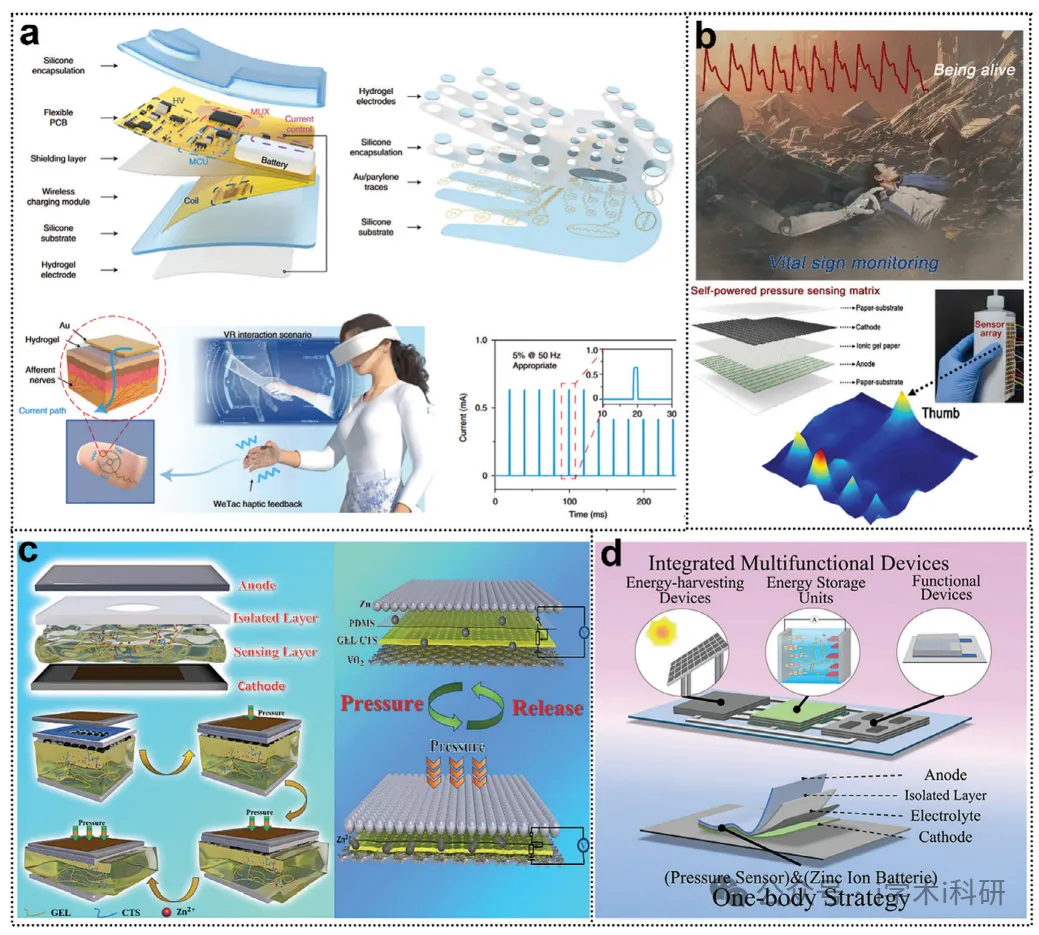
Figure 7. Self-powered tactile sensing systems combined with batteries.
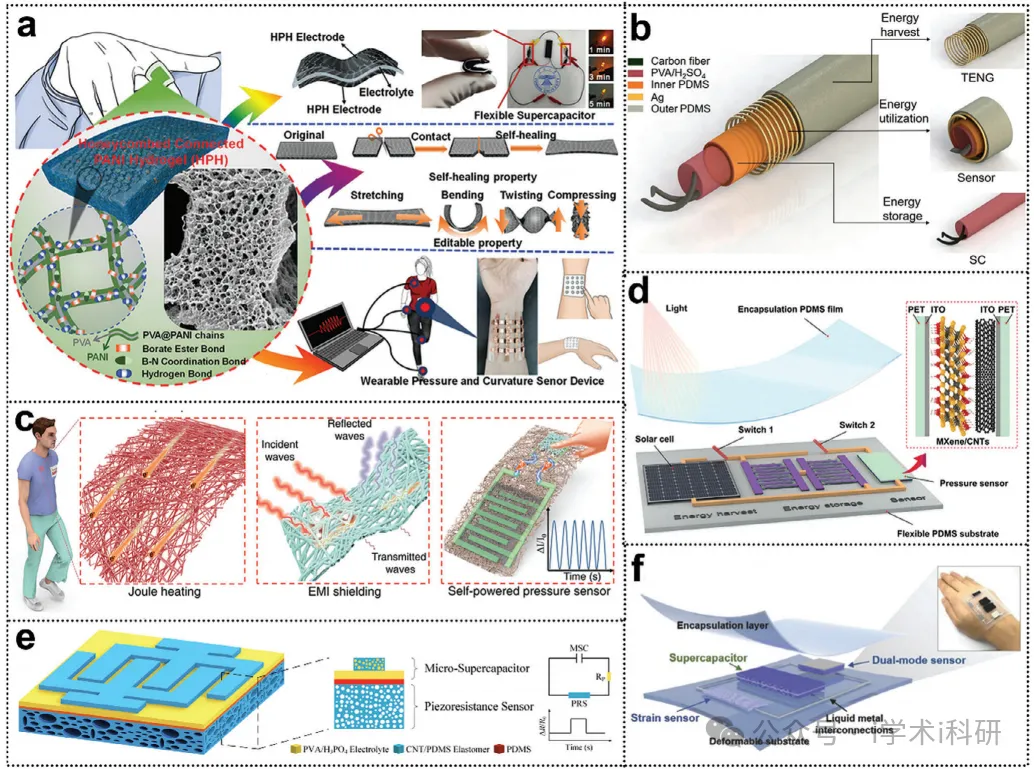
Figure 8. Self-powered tactile sensing systems combined with supercapacitors.
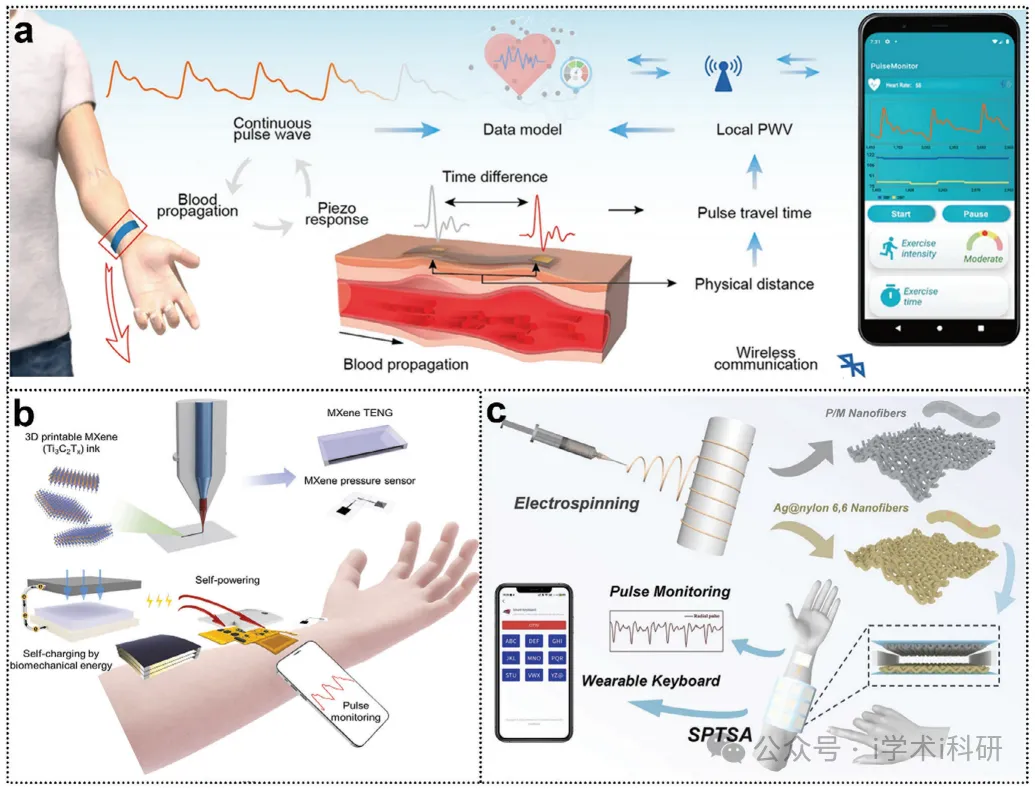
Figure 9. Self-powered tactile sensing for blood pressure and pulse monitoring.
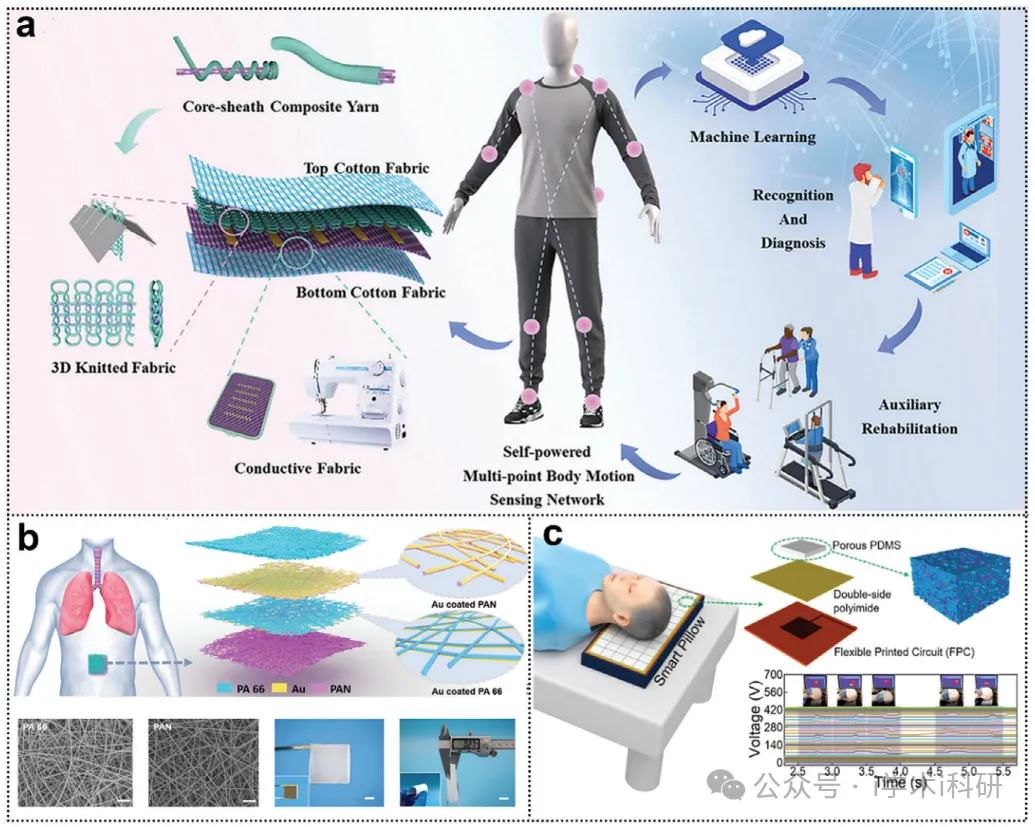
Figure 10. Self-powered tactile sensing for gait, respiratory and sleep monitoring.
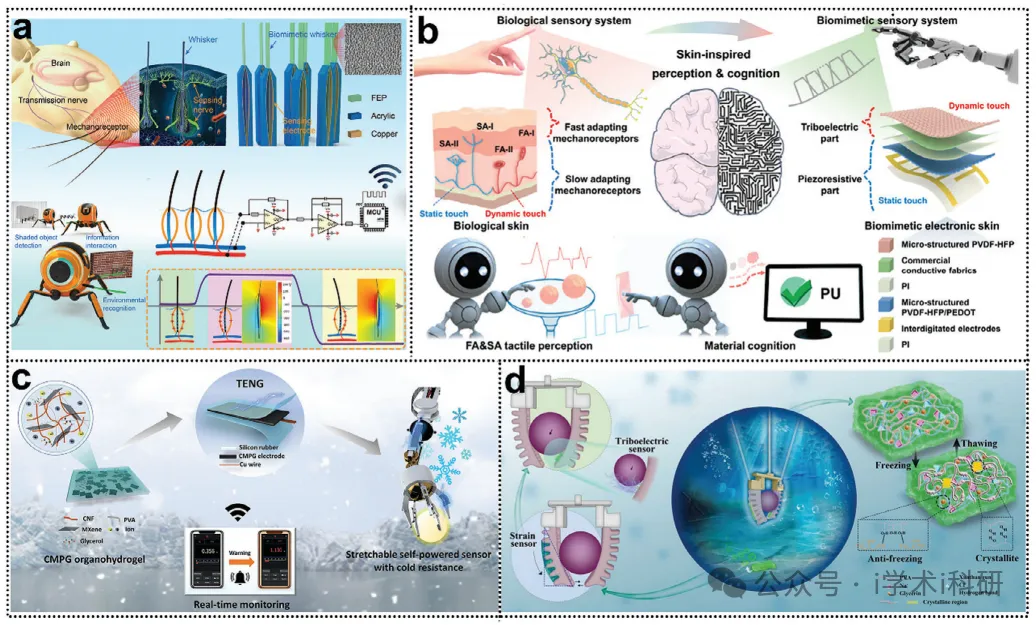
Figure 11. Self-powered tactile sensing for environment recognition, object recognition and grasping.
Figure 12. Self-powered tactile sensing for object material recognition, HMI and VR.
在过去的一年中,我们见证了自供电触觉传感领域的巨大进步及其在推进健康监测和机器人技术方面的关键作用。因此,自供电触觉传感器的设计受到越来越多的关注。本综述详细概述了压电式、摩擦静电式和自供电压阻式触觉传感器的最新进展,包括工作机制、材料选择、器件制造以及与能量采集和存储单元的集成。最后,介绍自供电触觉传感系统在健康监测和机器人技术中的应用。目前,研究人员已经开发出许多高性能材料,并对系统集成和耦合策略有了深入了解。尽管如此,自供电触觉传感系统仍面临着必须应对的挑战。
1.材料
材料创新在自供电触觉传感器设备中的作用至关重要,是实现设备功能和性能提升的关键因素。由于应用场景的复杂性,传感设备通常被用来组成系统。然而,某些传感设备的工作机制会影响系统的构成。例如,传感系统中的TENG 会受到机械串扰和电磁干扰的影响,进而影响其性能和输出稳定性。因此,探索具有高导电性和出色电磁屏蔽性能的材料已成为一个重要的研究方向。同时,还要探索具有高机械性能和高耐久性的材料,以便长期使用。
2.制造业
利用现有生产技术,以具有成本效益的方式大规模制造压敏材料具有挑战性,这限制了电子皮肤的大规模生产和相关商业化。例如,制造微图案结构以提高触觉传感器灵敏度的策略通常基于成本高昂的硅模具,而硅模具是一种复杂而昂贵的光刻方法。此外,已报道的方法很难制造出超薄、微结构压敏薄膜。开发具有微结构的超薄压敏复合膜具有重要意义,因为减小压敏层的厚度对于提高电子皮肤的柔韧性和保形性能非常重要。总之,应努力大规模开发压敏薄膜,实现厚度大幅降低的微结构压敏薄膜。
3.耐久性
耐用性是自供电触觉传感系统在长期运行过程中保持性能稳定性和功能可靠性的保证。在需要长期免维护运行的应用中,如健康监测、可穿戴设备和机器人等,耐用性尤为重要。虽然自供电技术为消除对电池的依赖提供了一种潜在的方法,但目前的能量转换效率和存储能量密度仍难以满足长时间、高频率运行的需求。目前,大多数系统在有限的循环次数后就会出现明显的性能下降。为了确保自供电传感系统的耐用性,需要优化能量收集机制的效率,确保在不同条件下都能收集到足够的能量,并设计高效的能量管理系统来平衡能量收集和消耗,以满足系统长期稳定运行的要求。
4.智能
算法随着传感器数量和类型的增加,如何有效处理和解析大量多维数据以提供实时、准确的反馈已成为一项重大挑战。当前的算法和处理模型需要进一步优化,以提高数据处理的速度和智能性。将自供电触觉传感系统与智能算法相结合,是模仿人类皮肤触觉传感能力的有效方法,可提供更高级别的交互能力和环境感知能力。通过利用自供电触觉传感器收集的数据,智能算法能够学习和识别复杂的模式和信号,从而提供更精确、更高效的决策支持。它不仅能提高设备的能效和自主性,还能为用户提供更丰富、更直观的交互体验。
文献链接:
https://doi.org/10.1002/smll.202405520


