前面我们实现了xmodem进行文件传输,xmodem一次只能传输一个文件,有时候希望一次传输多个文件,可以使用ymodem。Ymodem的实现见公众号文章
https://mp.weixin.qq.com/s/uDwVYJRDGrH6MZmUXn2Q3A YMODEM协议介绍与高效高可移植非阻塞版本实现。
上述Ymodem实现采用的是面向对象思想,模块化设计,只需要实现几个简单的接口即可。
shell_func.c中
#include "ymodem.h"
添加命令函数申明
static void ryfilefunc(uint8_t* param);
g_shell_cmd_list_ast中添加命令信息,
{ (uint8_t*)"ryfile", ryfilefunc, (uint8_t*)"ryfile"},
命令函数实现如下
void ryfilefunc(uint8_t* param){(void)param;int res = 0;ymodem_rx_cfg_st cfg={.buffer = rxtx_buf,.getms = getms,.io_read = io_read,.io_write = io_write,.start_timeout = 60,.packet_timeout = 2000,.ack_timeout = 1000,.mem_start = ymodem_rx_file_start,.mem_write = ymodem_rx_file_write,.mem_done = ymodem_rx_file_done,};ymodem_rx_init(&cfg);while((res = ymodem_rx()) == YMODEM_RX_ERR_NEED_CONTINUE);xprintf("\r\nres:%d\r\n",res);}
其中
.mem_start = ymodem_rx_file_start,.mem_write = ymodem_rx_file_write,.mem_done = ymodem_rx_file_done,
实现如下
static FIL ymodem_rx_fil; /* File object */static int ymodem_rx_file_open_flag = 0;static int ymodem_rx_file_start(uint32_t addr, uint8_t** name, uint32_t* len){(void)addr;(void)len;int res = 0;if(ymodem_rx_file_open_flag == 0){FRESULT res = f_open(&ymodem_rx_fil, (const char*)(*name), FA_CREATE_NEW | FA_WRITE);if (FR_OK == res){ymodem_rx_file_open_flag = 1;return 0;}else{xprintf("open %s err %d\r\n",name,res);return -1;}}return res;}static uint32_t ymodem_rx_file_write(uint32_t addr, uint8_t* buffer, uint32_t len){(void)addr;if(ymodem_rx_file_open_flag != 0){UINT bw;FRESULT res = f_write(&ymodem_rx_fil, buffer, len, &bw);if ((bw != len) || (res != FR_OK)){xprintf("write err %d %d\r\n",bw,res);}return bw;}else{return 0;}}static int ymodem_rx_file_done(void){if(0 != ymodem_rx_file_open_flag){ymodem_rx_file_open_flag = 0;return f_close(&ymodem_rx_fil);}return 0;}
其他的接口和xmodem一样
.getms = getms,.io_read = io_read,.io_write = io_write,
Help查看命令

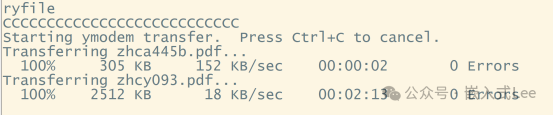
ryfile接收多个文件,电脑端ymodem发送
crt第二个文件后会以小包发送,所以速率慢很多。
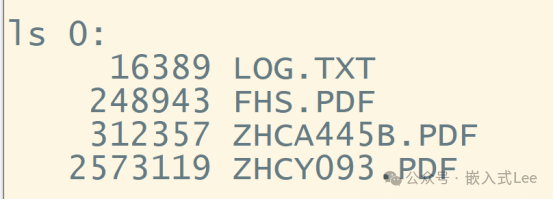
然后ls查看,收到的文件
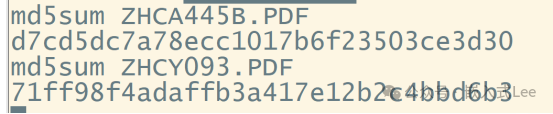
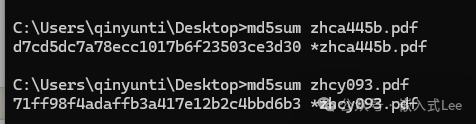
计算MD5sum,原始数据和收到的数据一致。
shell_func.c中
#include "ymodem.h"
添加命令函数申明
static void syfilefunc(uint8_t* param);
g_shell_cmd_list_ast中添加命令信息,
{ (uint8_t*)"syfile", syfilefunc, (uint8_t*)"syfile len path1 path2"},
命令函数实现如下,这里实现最多一次发送2个文件,可以修改支持在命令行中解析支持更多文件即可。
void syfilefunc(uint8_t* param){(void)param;int plen = 0;int res;int num = 0;ymodem_tx_cfg_st cfg={.buffer = rxtx_buf,.getms = getms,.io_read = io_read,.io_write = io_write,.start_timeout = 60,.packet_timeout = 2000,.ack_timeout = 2000,.plen = 1024,.mem_start = ymodem_tx_file_start,.mem_read = ymodem_tx_file_read,.mem_done = ymodem_tx_file_done,};memset(ymodem_sfile_name,0,sizeof(ymodem_sfile_name));ymodem_tx_file_num = 0;num = sscanf((const char*)param, "%*s %d %s %s", &plen, ymodem_sfile_name[0],ymodem_sfile_name[1]);if((num == 2) || (num == 3)){cfg.plen = plen;ymodem_tx_init(&cfg);while((res = ymodem_tx()) == YMODEM_TX_ERR_NEED_CONTINUE);xprintf("\r\nres:%d\r\n",res);}}
其中接口
.mem_start = ymodem_tx_file_start,.mem_read = ymodem_tx_file_read,.mem_done = ymodem_tx_file_done,
实现如下
static int8_t ymodem_sfile_name[2][64];static int ymodem_tx_file_open_flag = 0;static uint32_t ymodem_tx_file_num = 0;static FIL ymodem_tx_file;static uint8_t ymodem_sfile_name_len_att[128];/* 获取文件名 */static int ymodem_tx_file_start(uint32_t addr, uint8_t** name, uint32_t* len){(void)addr;(void)len;uint32_t flen;uint32_t fnamelen;int res = 0;if(ymodem_tx_file_open_flag != 0){f_close(&ymodem_tx_file);ymodem_tx_file_open_flag = 0;}if(ymodem_tx_file_num >= sizeof(ymodem_sfile_name)/sizeof(ymodem_sfile_name[0])){return -1;}if(0 == (res = f_open(&ymodem_tx_file, (const char*)ymodem_sfile_name[ymodem_tx_file_num], FA_READ))){flen = f_size(&ymodem_tx_file);fnamelen = strlen((const char*)ymodem_sfile_name[ymodem_tx_file_num]);memcpy(ymodem_sfile_name_len_att,ymodem_sfile_name[ymodem_tx_file_num],fnamelen);ymodem_sfile_name_len_att[fnamelen]=0;*len = fnamelen + 1 + snprintf((char*)(&ymodem_sfile_name_len_att[fnamelen+1]),sizeof(ymodem_sfile_name_len_att)-(fnamelen+1),"%ld %o %d",flen,1715670058,0);*name = ymodem_sfile_name_len_att;ymodem_tx_file_open_flag = 1;}ymodem_tx_file_num++;return res;}static uint32_t ymodem_tx_file_read(uint32_t addr, uint8_t* buffer, uint32_t len){(void)addr;UINT br;FRESULT res = f_read(&ymodem_tx_file, buffer, len, &br);if(res != 0){xprintf("read err %d\r\n",res);}return br;}static int ymodem_tx_file_done(void){if(0 != ymodem_tx_file_open_flag){ymodem_tx_file_open_flag = 0;return f_close(&ymodem_tx_file);}return 0;}
其他接口和xmodem一样
.buffer = rxtx_buf,.getms = getms,.io_read = io_read,.io_write = io_write,
Help查看命令

syfile 发送文件到电脑
MD5sum计算校验信息。
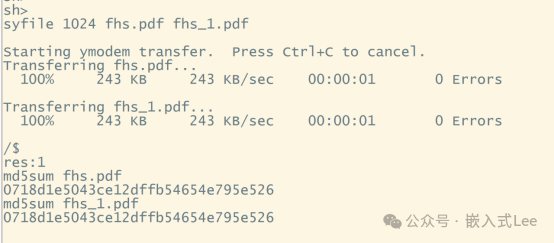

得益于之前设计的ymodem的轮子,只需要几个简单的接口,即可快速集成ymodem传输文件功能。
