

据麦姆斯咨询报道,近期,香港科技大学(Hong Kong University of Science and Technology,HKUST)的一个科研项目展示了一种采用半球形纳米线阵列的超宽视场人工复眼,有望增强机器人的视觉能力,相关论文以“An ultrawide field-of-view pinhole compound eye using hemispherical nanowire array for robot vision”为题发表于Science Robotics期刊。研究人员表示:“该人工复眼不仅更具成本效益,而且在小范围内的灵敏度至少是现有市场产品的两倍”。
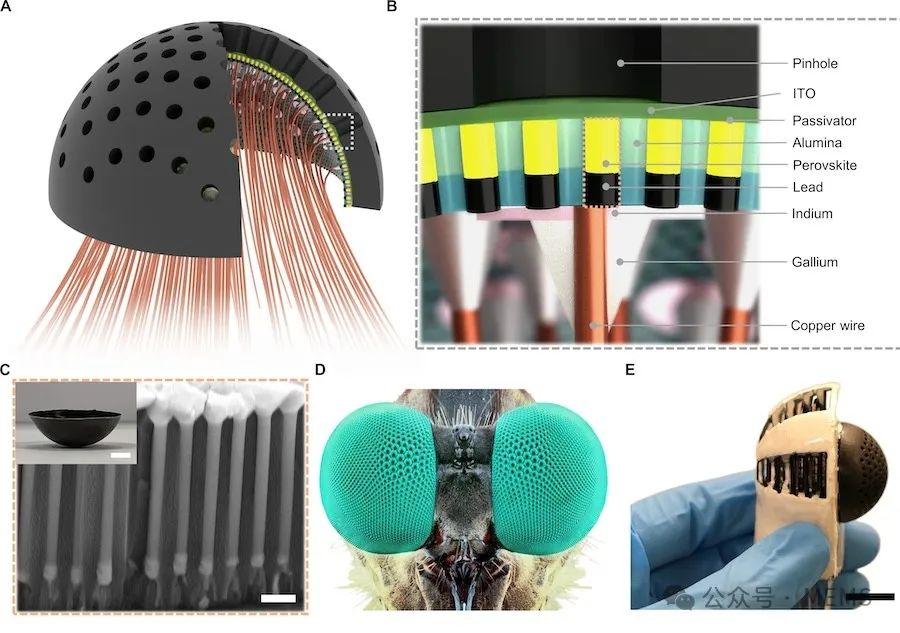
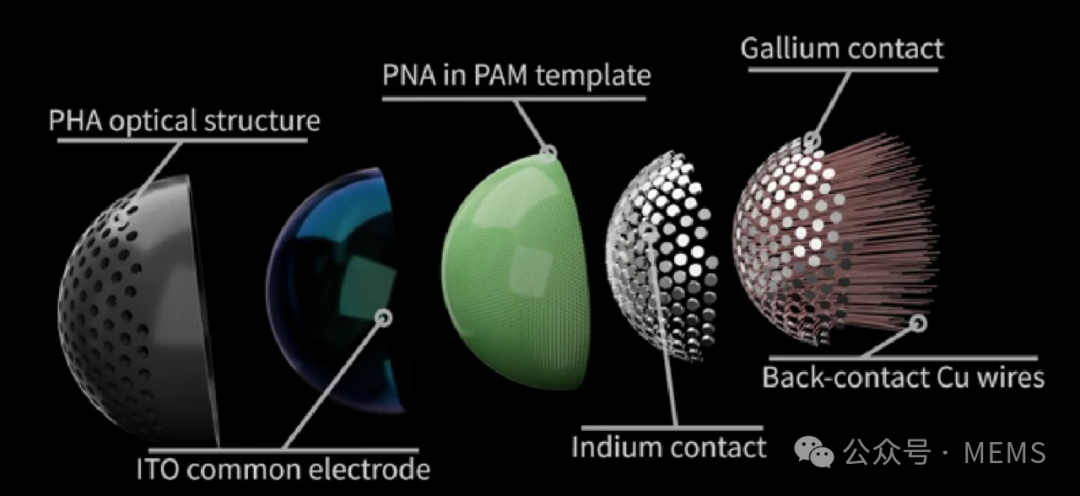
基于半球形纳米线阵列的超宽视场人工复眼及其组件示意图
香港科技大学从自然界中汲取灵感,将其研发的人工复眼添加到最近在模仿动物界各种眼睛的视觉系统中取得技术突破的名单上。之前已有研究人员将昆虫和动物的仿生视觉案例应用于癌症治疗、多光谱物体检测和其它新的光学成像领域。
昆虫的复眼特别有吸引力,因为其具有广阔的视野和运动跟踪的能力,这是工业应用和响应式机器人视觉系统的理想组合。但是,将复眼系统集成到机器人或无人机等自主平台中一直具有挑战性。香港科技大学称,这些复眼系统经常遭遇与变形和几何约束相关的复杂性和稳定性问题,以及光学组件和探测器之间可能存在的不匹配问题。
香港科技大学的这个科研项目在发表的论文中指出:“之前将微透镜阵列转移到曲面上的尝试在转移过程中遇到了麻烦。作为一种替代方法,香港科技大学通过将3D打印的蜂窝状光学结构与半球形、全固态、高密度钙钛矿纳米线光电探测器阵列相结合,开发出了一种无透镜的仿生复眼。”
机器人应用的巨大推动力
在香港科技大学的这种仿生复眼设计中,半球形阵列图像传感器可以具有高像素密度以扩大成像范围。而3D打印的无透镜针孔阵列可以具有可定制的布局设置,以调节入射光并消除相邻小眼(昆虫复眼内的各个单元)之间的盲区。
在试验中,良好的角度选择性、宽视场、单目和双目配置的宽光谱响应,以及动态运动跟踪能力的结合使该仿生复眼不仅能够准确定位目标,而且还可以在将图像传感器集成到无人机上后实时跟踪移动的四足机器人。
香港科技大学评论道,这种跟踪练习和对移动目标的跟踪试验表明,新的仿生复眼对于先进的机器人视觉系统特别有价值。如果该研究团队能够进一步缩小系统尺寸并增加其具有的小眼数量,那么增强的成像分辨率和响应速度就可以在许多机器人视觉场景中得到利用。
香港科技大学的Zhiyong Fan评论说:“这种仿生复眼设计简单、轻便、便宜。虽然它不会完全取代传统相机,但它可能会极大地促进某些机器人应用,例如在密集编队飞行的无人机群。”
论文信息:
DOI: 10.1126/scirobotics.adi8666



