节肢动物(例如蜜蜂和蜻蜓)的眼睛是由定向微透镜(microlens)阵列构成的复杂3D视觉工具。尽管有人试图利用曲面微透镜阵列模仿节肢动物的眼睛来实现人工全景视觉,但与光学像差和制造复杂性有关的问题层出不穷。然而,这种广角3D成像对于自主机器人系统来说正变得越来越重要,但大多数现有解决方案无法同时满足视场(FoV)、帧率或抗机械磨损方面的要求。超构表面(Metasurface)或平面纳米结构光学表面可以克服曲面光学的局限性,实现全景视觉并将光选择性聚焦在平面上。
据麦姆斯咨询报道,近日,法国蔚蓝海岸大学(Université Côte d' Azur)、瑞士洛桑联邦理工学院(EPFL)等机构的研究人员组成的团队提出将定向超构透镜阵列(MLA)片上(On-chip)垂直集成到时间门控传感器上,实现了一种强大的仿生激光雷达(LiDAR),能够在无需任何机械部件的情况下实现广角3D成像。超构透镜阵列的设计是平面的,但灵感来自节肢动物的曲面眼睛。它由一组微尺度超构透镜(Metalens)构成,每个超构透镜都经过专门设计,具有独特的相位分布,使整个超构透镜阵列可以模仿蜻蜓曲面眼睛的光学功能。平面定向光学接口的实现促进了平面检测模块顶部的垂直集成,使定向成像测量不受传统曲面光学系统的固有限制。上述研究成果以“Bio-inspired flat optics for directional 3D light detection and ranging”为题发表于npj Nanophotonics期刊。
定向超构透镜阵列的设计
蜻蜓的复眼结构(见图1a)依赖于每个小眼(ommatidium)(见图1c)从一个非常小的立体角收集光线。所有小眼结构相同,因此具有相同的数值孔径(NA)。眼睛的曲率使得两个相邻的小眼指向略微不同的方向(θ1, φ1)和(θ2, φ2),它们之间相隔一个小眼间角(Δθ, Δφ)(参见图1c)。通过将许多小眼组合在一起形成一个紧凑的曲面,视场如图1c所示被分割。
本研究的目标是通过将120° × 120°的视场细分来模仿蜻蜓复眼的特性,并尽可能减少阴影区域的大小。为此,研究人员考虑了17 × 19 = 323个并置的六边形超构透镜,其周期为11.5 μm,数值孔径在−60°到60°之间均匀分布,角度步长分别为Δθ = 6.66°和Δφ = 7.5°(参见图1d和1e)。
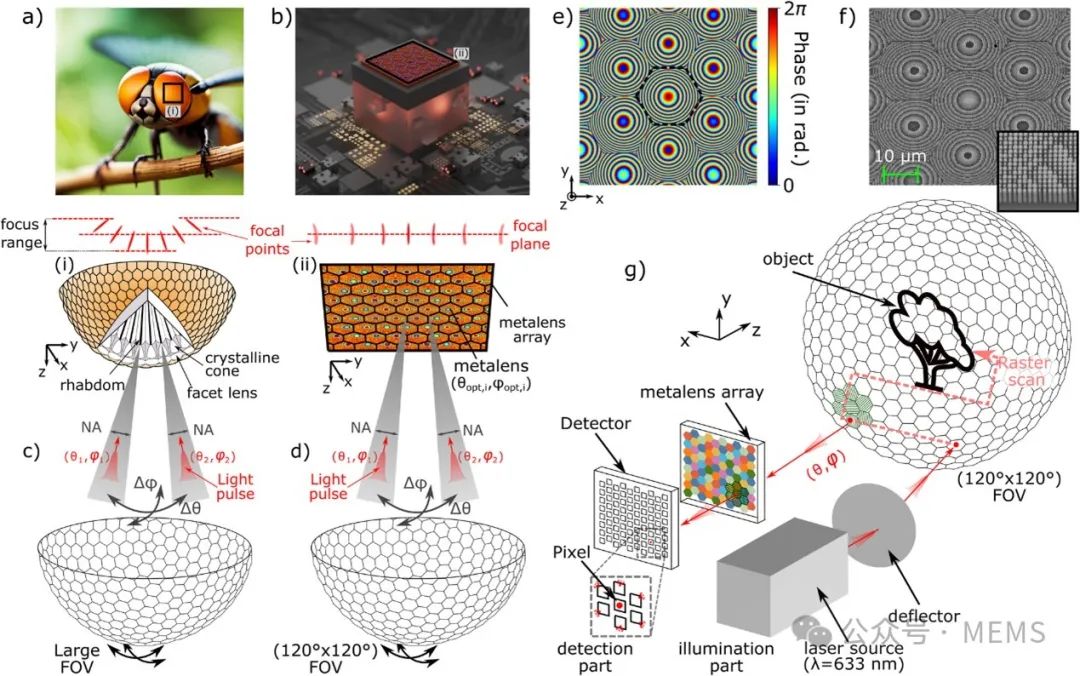
图1 蜻蜓的复眼结构以及3D定向激光雷达的工作原理示意图
为了进行定向检测,超构透镜阵列与探测器矩阵(单光子雪崩二极管(SPAD)阵列或快速CCD相机)耦合(参见图1b)。超构透镜阵列的间距和焦平面可根据实验中使用的相机进行调整。图1g讨论了定向超构透镜与局部检测区域的这种特定关联。超构透镜阵列的相位分布被分割,使得第i个超构透镜收集与其自身方向相关的信息(图1g)。
研究人员按照无源超构表面的经典方法设计了超构透镜阵列,即定义一个超构原子(Meta-atom)查找表,使相移范围从0到2π。超构透镜的设计工作波长为 633 nm,以透射模式运行。超构原子由在蓝宝石(Al₂O₃)基底上的GaN纳米柱构成,排列在周期为250 nm的方形网格上。纳米柱设计为具有较大的纵横比,高度约为1 μm,半径在54 nm到102 nm之间变化,以实现高透射效率(> 90%)的2π相位调制。
超构透镜阵列的实验表征
研究人员在双面抛光的c-蓝宝石基底上生长的1 μm GaN薄膜上制备了250 × 250 μm²的超构表面。制备完成的超构透镜阵列的SEM图像如图1f所示。接着,他们建立了一个光学平台用于对超构透镜阵列进行实验表征,如图2所示。
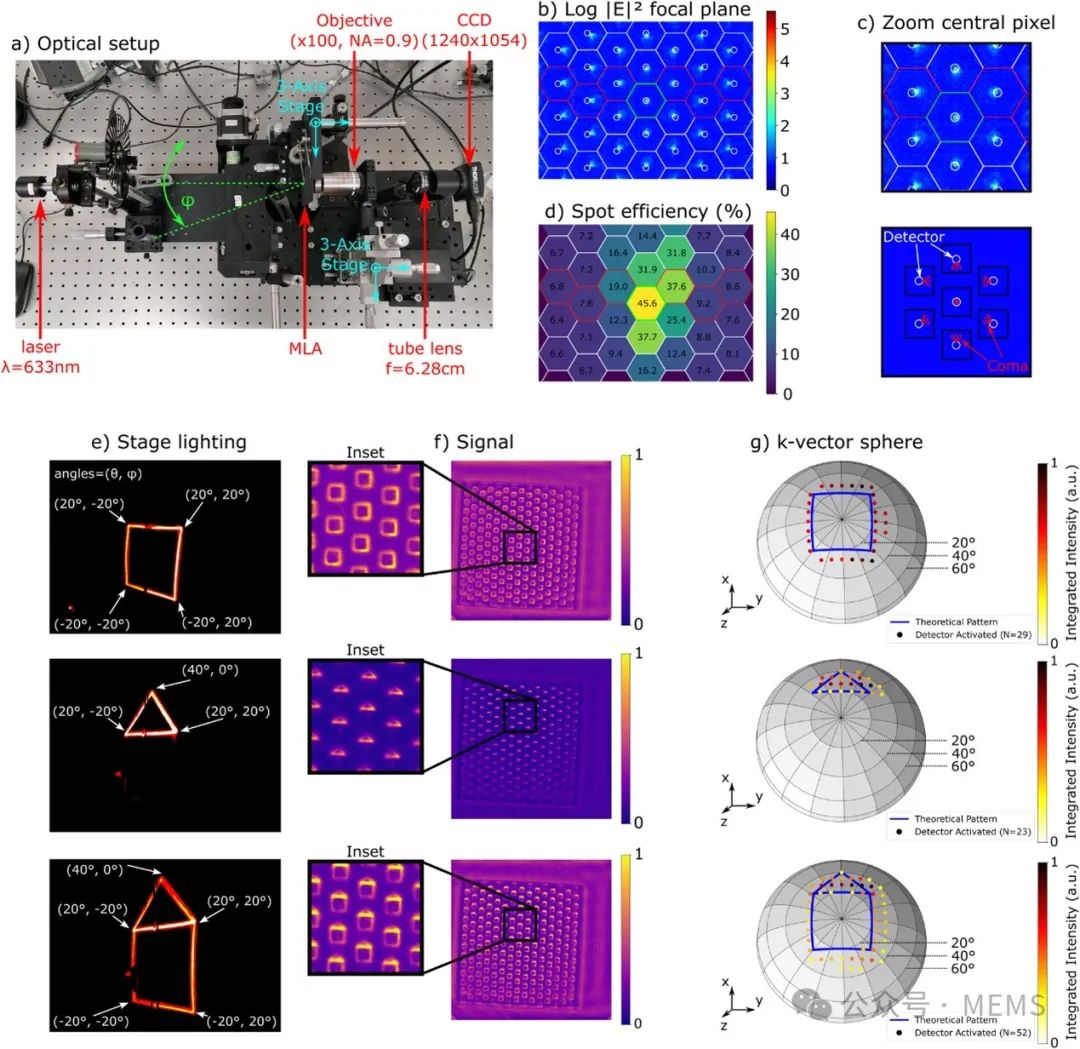
图2 超构透镜阵列的性能表征
集成定向超构透镜阵列的激光雷达实验
使用脉冲光而非连续光波照射,并结合超构透镜阵列的定向检测能力,研究人员可实现对场景中各种物体的角度和深度测量。这种功能强大的激光雷达成像系统能够利用非扫描检测模块恢复不同的照射方向和不同的深度。该实验旨在恢复一个由三个反射物体组成的场景的3D信息(参见图3a)。研究人员利用扫描脉冲照射引擎(如图3b所示)在六个不同位置对上述场景进行照射。照射系统包括一个波长为λ = 633 nm的激光源,以500 kHz的频率脉冲发射,脉冲宽度为20 ns,通过一个2D声光偏转器(AOD)(视场2° × 2°)进行角度偏转。检测部分如图3c所示,实验测试结果如图3d、3e、3f所示。
对于所有六个照射方向,激活像素的优化角度对(图3d和3f中的箭头)与理论照射角度一致(见图3a中的黑框)。对于六个照射点,六个探测器的积分信号的时间演化分别对应于从六个反射物体中的每一个返回的光的预期深度和探测角度(图3d)。
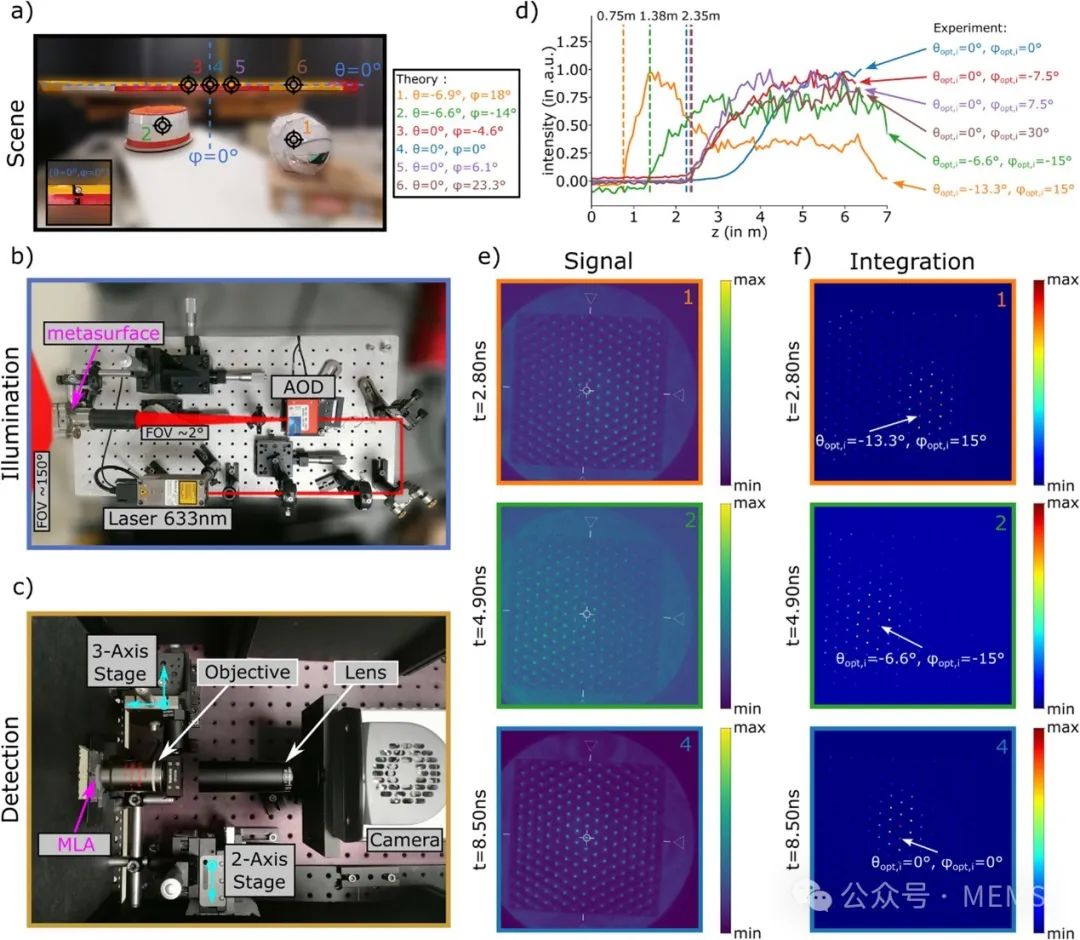
图3 激光雷达测量实验
综上所述,这项研究设计并制造了一个用于定向检测的超构透镜阵列,并将该检测模块集成到飞行时间(ToF)激光雷达实验中。作为概念验证,设计用于将定向光聚焦在平面上的超构透镜阵列被放置在门控CCD前方,该相机与激光雷达照射激光源的脉冲发射频率(500 kHz)同步触发。超构透镜阵列对探测器的激活与设计的系统十分吻合,可实现光照的空间(方向)和时间(深度)检测。大角度下的测量结果的一些不精确性,部分是由于用于在CCD相机上对超构透镜焦平面成像的光学系统中的像差造成的,可通过将超构透镜阵列垂直集成到SPAD阵列检测模块上来解决,这是一种更具挑战性但技术上可行的解决方案。
论文链接:
https://doi.org/10.1038/s44310-024-00017-6



