在夜间、阴影或多雾等不利照明条件下的物体探测能力,可以大大提高自动驾驶汽车和移动机器人系统的可靠性。然而,目前大部分广泛采用的计算机视觉方法,在光照不佳情况下的表现往往不尽如人意。
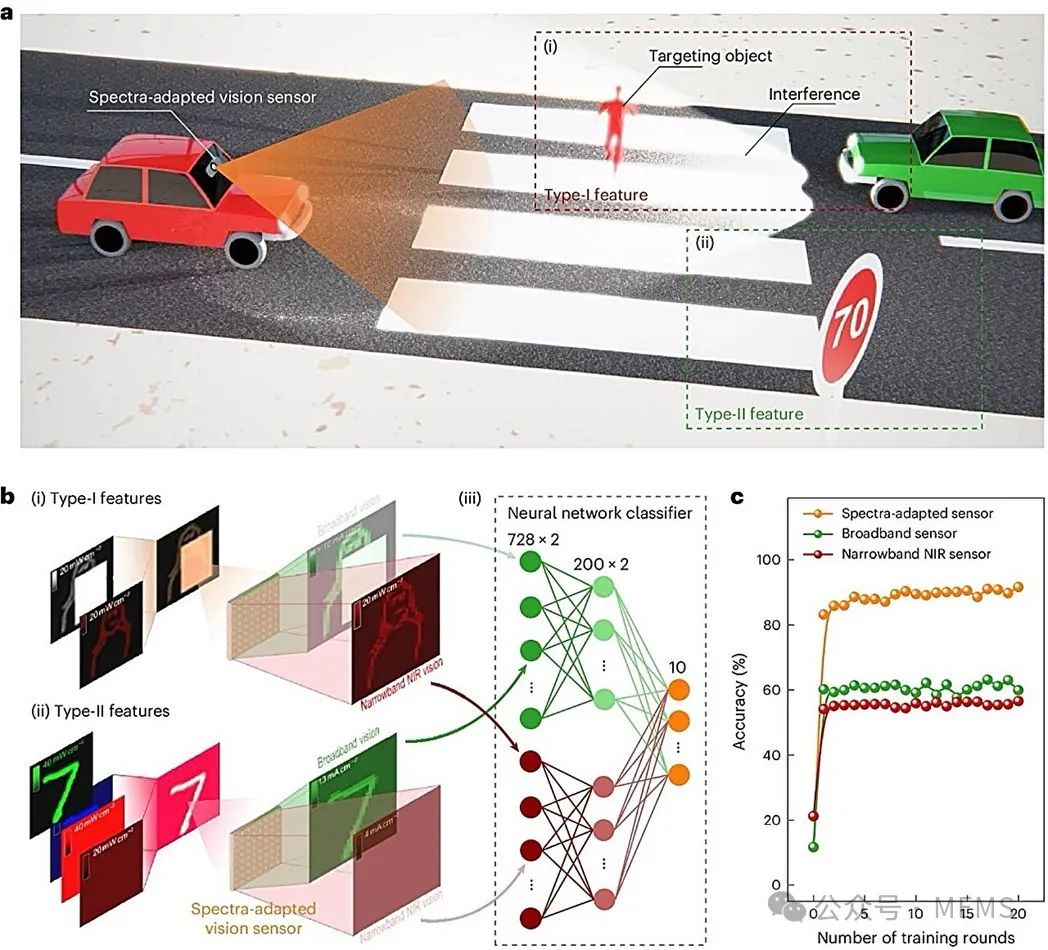
(a)光谱自适应视觉传感器的应用场景示意图;(b)光谱自适应视觉系统的运行方案。
据麦姆斯咨询介绍,香港理工大学的研究人员开发出一种受生物启发的新型视觉传感器,它能适应所处环境的光谱特征,从而在更广泛的照明条件下成功探测物体。该研究成果已发表于Nature Electronics期刊,研究人员在论文中介绍了这种基于背靠背排列光电二极管阵列的新型传感器。
该论文第一作者Bangsen Ouyang表示:“在之前的研究中,我们提出了一种简单的传感器内光强适应方法,以提高机器视觉系统的识别精度。基于过去的研究基础,我们将这一策略从光强维度扩展到了光谱维度。”
Ouyang及其同事最近的这项研究旨在设计一种在强光干扰或烟雾环境中,相比其它传感器具有更强物体识别能力的视觉传感器。此外,这种新型传感器在收集数据时还具有最小的时间延迟,且耗电量极低。
Ouyang解释说:“我们的目标是在不依赖光学配件或复杂算法资源的情况下实现这一目标,因为光学配件或复杂算法会增加系统的体积、功耗以及延迟。我们设计的视觉传感器基于背靠背光电二极管阵列,它们由具有不同光谱灵敏度的可切换结组成。”
具体来说,其浅结由TiO2/Sb2Se3组成,而深结由Sb2Se3/Si组成。这两个结的选择可以通过外部偏置电压来控制。
选择传感器中的浅结可提高传感器对短波长光的灵敏度,而选择深结则可提高传感器对长波长光的灵敏度。因此,该传感器的独特设计使其光电二极管能够调整匹配宽带可见光谱,以及窄带近红外光谱。
“光谱适应过程需要数十微秒,与最先进高速相机的帧频(约100 kHz)相当。”Ouyang说,“这种光谱自适应能力,有效增加了场景的韦伯对比度,从而提高了传感器暴露在可见光强眩光下的特征识别精度。”
在最初的测试中,Ouyang及其同事提出的传感器内光谱适应方法取得了非常可喜的成果。在应用于自动驾驶汽车的视觉系统时,发现这种方法可以实现低延迟、低功耗的防眩光功能,而且不需要额外的光学配件或复杂的计算算法。
“我们的研究引入了一种创新的传感器内光谱适应技术。”Ouyang说,“光谱适应过程非常快,与最先进高速相机的帧频(约100 kHz)相当。这种传感器内光谱适配方法的实际意义令人兴奋,因为它无需光学配件或复杂的算法资源。”
该研究小组开发的新型传感器可以提高自主机器人的系统能力,特别是在不增加功耗的情况下,提高它们在不同照明条件下的物体识别性能。这种传感器可以集成到多种技术应用中,包括自动驾驶汽车、医疗器械、工业或制造机器人以及监控系统等。
研究人员补充说:“我们在这一领域的未来研究计划包括提高视觉传感器的响应、动态范围、速度以及其他关键性能。我们还热衷于在视觉传感器中探索集成其它传感功能,例如偏振和三维深度。”
研究人员接下来的研究将聚焦制造大规模视觉传感器阵列,以及相应的外围电路和软件,以为实际应用开发成熟的人工视觉芯片。
论文信息:
DOI: 10.1038/s41928-024-01208-x



