USB接口随处可见,手机、电脑、电视,以及各种电子产品充电口(虽然是USB-C,但它也是USB)都有USB的身影。
USB应用非常广泛,很多嵌入式设备也具有USB通信能力,这里给大家分享一下USB通信协议主要内容,新手都能看明白(当然,最好还是有一定通信协议基础才行)。
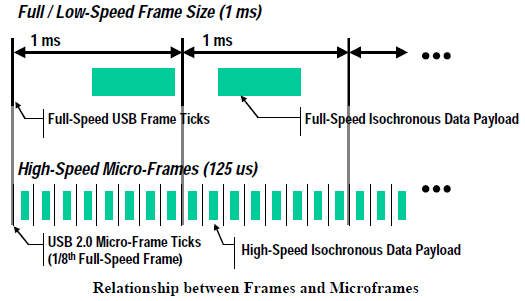
一个【传输】(控制、批量、中断、等时):由多个【事务】组成;一个【事务】(IN、OUT、SETUP):由一多个【Packet】组成。USB数据在【主机软件】与【USB设备特定的端点】间被传输。【主机软件】与【USB设备特定的端点】间的关联叫做【pipes】。一个USB设备可以有多个管道(pipes)。包(Packet)是USB系统中信息传输的基本单元,所有数据都是经过打包后在总线上传输的。数据在 USB总线上的传输以包为单位,包只能在帧内传输。高速USB 总线的帧周期为125us,全速以及低速 USB 总线的帧周期为 1ms。帧的起始由一个特定的包(SOF 包)表示,帧尾为 EOF。EOF不是一个包,而是一种电平状态,EOF期间不允许有数据传输。注意:虽然高速USB总线和全速/低速USB总线的帧周期不一样,但是SOF包中帧编号的增加速度是一样的,因为在高速USB系统中,SOF包中帧编号实际上取得是计数器的高11位,最低三位作为微帧编号没有使用,因此其帧编号的增加周期也为 1mS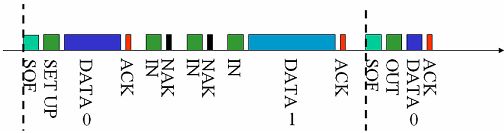
包是USB总线上数据传输的最小单位,不能被打断或干扰,否则会引发错误。若干个数据包组成一次事务传输,一次事务传输也不能打断,属于一次事务传输的几个包必须连续,不能跨帧完成。一次传输由一次到多次事务传输构成,可以跨帧完成。
USB包由五部分组成,即同步字段(SYNC)、包标识符字段(PID)、数据字段、循环冗余校验字段(CRC)和包结尾字段(EOP),包的基本格式如下图: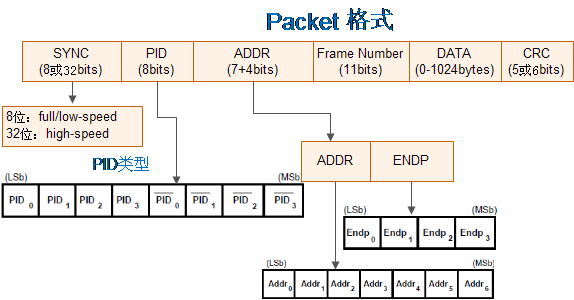
1.1 PID类型(即包类型)
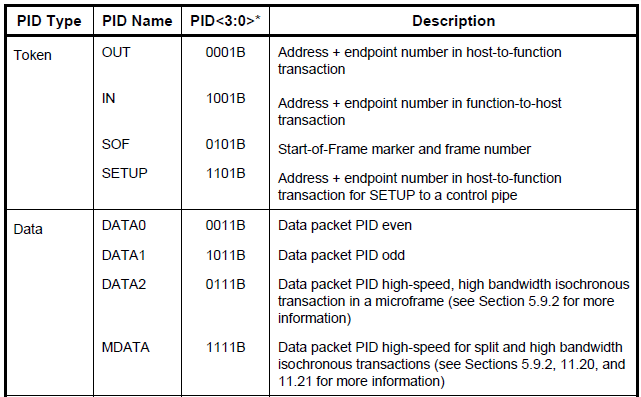
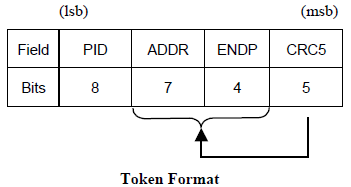
1.2 Token Packets
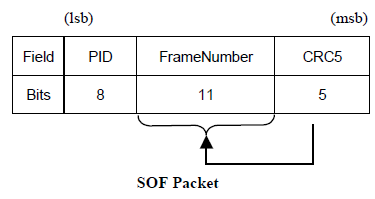
1.3 Start-of-Frame(SOF) Packets
对于full-speed总线,每隔1.00 ms ±0.0005 ms发送一次;
对于high-speed总线,每隔125 μs ±0.0625 μs发送一次;
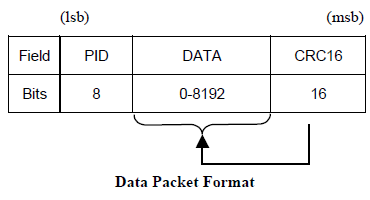
有四种类类型的数据包:DATA0, DATA1, DATA2,and MDATA,且由PID来区分。DATA0和DATA1被定义为支持数据切换同步(data toggle synchronization)。
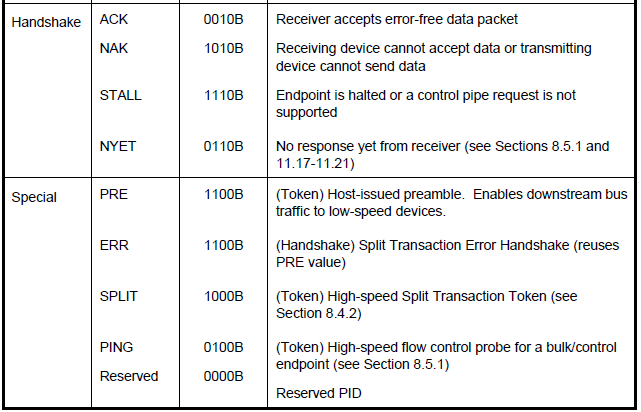
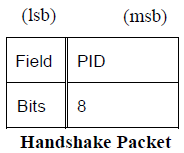
1.5 Handshake Packets
在USB上数据信息的一次接收或发送的处理过程称为事务处理(Transaction)即:The delivery of service to an endpoint。一个事务由一系统packet组成,具体由哪些packet组成,它取决于具体的事务。可能由如下包组成:2.1 输入(IN)事务处理
输入事务处理:表示USB主机从总线上的某个USB设备接收一个数据包的过程。


2.2. 输出(OUT)事务处理
输出事务处理:表示USB主机把一个数据包输出到总线上的某个USB设备接收的过程。


2.3 设置(SETUP)事务处理



3.1 控制传输 (Control Transfer)
建立阶段(Setup)
数据阶段(无数据控制没有此阶段)(DATA)
状态阶段(Status)
每个阶段都由一次或多次(数据阶段)事务传输组成(Transaction)。控制数据由USB系统软件用于配置设备(在枚举时),其它的驱动软件可以选择使用control transfer实现具体的功能,数据传输是不可丢失的。3.1.1 建立阶段
主机从USB设备获取配置信息,并设置设备的配置值。建立阶段的数据交换包含了SETUP令牌封包、紧随其后的DATA0数据封包以及ACK握手封包。它的作用是执行一个设置(概念含糊)的数据交换,并定义此控制传输的内容(即:在Data Stage中IN或OUT的data包个数,及发送方向,在Setup Stage已经被设定)。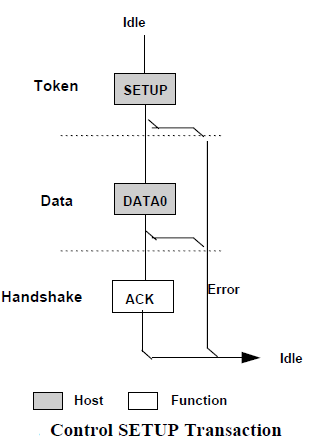
3.1.2 数据阶段
根据数据阶段的数据传输的方向,控制传输又可分为3种类型:控制读取(读取USB描述符)
控制写入(配置USB设备)
无数据控制
是将数据从设备读到主机上,读取的数据USB设备描述符。该过程如下图的【Control Read】所示。对每一个数据信息包而言,首先,主机会发送一个IN令牌信息包,表示要读数据进来。然后,设备将数据通过DATA1/DATA0数据信息包回传给主机。最后,主机将以下列的方式加以响应:当数据已经正确接收时,主机送出ACK令牌信息包;当主机正在忙碌时,发出NAK握手信息包;当发生了错误时,主机发出STALL握手信息包。是将数据从主机传到设备上,所传的数据即为对USB设备的配置信息,该过程如下的图【Control Wirte】所示。对每一个数据信息包而言,主机将会送出一个OUT令牌信息包,表示数据要送出去。紧接着,主机将数据通过DATA1/DATA0数据信息包传递至设备。最后,设备将以下列方式加以响应:当数据已经正确接收时,设备送出ACK令牌信息包;当设备正在忙碌时,设备发出NAK握手信息包;当发生了错误时,设备发出STALL握手信息包。
3.1.3 状态阶段
状态阶段传输的方向必须与数据阶段的方向相反,即原来是IN令牌封包,这个阶段应为OUT令牌封包;反之,原来是OUT令牌封包,这个阶段应为IN令牌封包。对于【控制读取】而言,主机会送出OUT令牌封包,其后再跟着0长度的DATA1封包。而此时,设备也会做出相对应的动作,送ACK握手封包、NAK握手封包或STALL握手封包。相对地对于【控制写入】传输,主机会送出IN令牌封包,然后设备送出表示完成状态阶段的0长度的DATA1封包,主机再做出相对应的动作:送ACK握手封包、NAK握手封包或STALL握手封包。3.2 批量传输 (Bulk Transfer)
用于传输大量数据,要求传输不能出错,但对时间没有要求,适用于打印机、存储设备等。批量传输是可靠的传输,需要握手包来表明传输的结果。若数据量比较大,将采用多次批量事务传输来完成全部数据的传输,传输过程中数据包的PID 按照 DATA0-DATA1-DATA0-…的方式翻转,以保证发送端和接收端的同步。USB 允许连续 3次以下的传输错误,会重试该传输,若成功则将错误次数计数器清零,否则累加该计数器。超过三次后,HOST 认为该端点功能错误(STALL),放弃该端点的传输任务。一次批量传输(Transfer)由 1 次到多次批量事务传输(Transaction)组成。翻转同步:发送端按照 DATA0-DATA1-DATA0-…的顺序发送数据包,只有成功的事务传输才会导致 PID 翻转,也就是说发送端只有在接收到 ACK 后才会翻转 PID,发送下一个数据包,否则会重试本次事务传输。同样,若在接收端发现接收到到的数据包不是按照此顺序翻转的,比如连续收到两个 DATA0,那么接收端认为第二个 DATA0 是前一个 DATA0 的重传。它通过在硬件级执行“错误检测”和“重传”来确保host与device之间“准确无误”地传输数据,即可靠传输。它由三种包组成(即IN事务或OUT事务):token
data
handshake
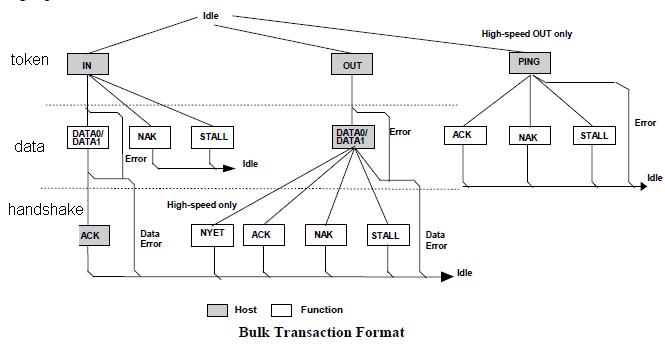
For IN Token (即:IN Transaction)
For OUT Token (即:OUT Transaction)
如果接收到的数据包有误,如:CRC错误,Device不发送任何handshake包ACK: Device已经正确无误地接收到数据包,且通知Host可以按顺序发送下一个数据包
NAK: Device 已经正确无误地接收到数据包,且通知Host重传数据,由于Device临时状况(如buffer满)
STALL: 指示Device endpoint已经停止,且通知Host不再重传
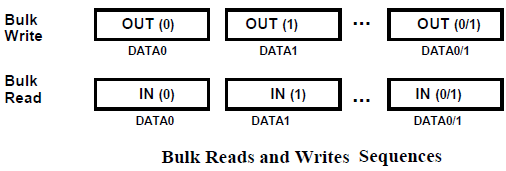
Bulk读写序列
3.3 中断传输(Interrupt Transfer)中断传输在流程上除不支持PING 之外,其他的跟批量传输是一样的。他们之间的区别也仅在于事务传输发生的端点不一样、支持的最大包长度不一样、优先级不一样等这样一些对用户来说透明的东西。主机在排定中断传输任务时,会根据对应中断端点描述符中指定的查询间隔发起中断传输。中断传输有较高的优先级,仅次于同步传输。同样中断传输也采用PID翻转的机制来保证收发端数据同步。下图为中断传输的流程图。中断传输方式总是用于对设备的查询,以确定是否有数据需要传输。因此中断传输的方向总是从USB设备到主机。
DATA0或DATA1中的包含的是中断信息,而不是中断数据。3.4 同步传输(Isochronous Transfer)
它由两种包组成:
token
data
同步传输不支持“handshake”和“重传能力”,所以它是不可靠传输。同步传输是不可靠的传输,所以它没有握手包,也不支持PID翻转。主机在排定事务传输时,同步传输有最高的优先级。同步传输适用于必须以固定速率抵达或在指定时刻抵达,可以容忍偶尔错误的数据上。实时传输一般用于麦 克风、喇叭、UVC Camera等设备。实时传输只需令牌与数据两个信息包阶段,没有握手包,故数据传错时不会重传。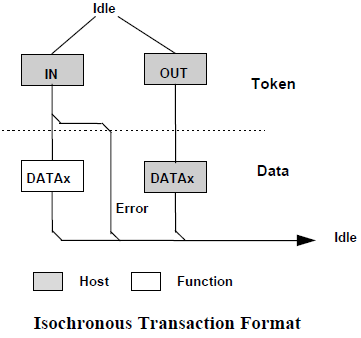
https://blog.csdn.net/myarrow/article/details/8484113
声明:本文素材来源网络,版权归原作者所有。如涉及作品版权问题,请与我联系删除。------------ END ------------
关注公众号回复“加群”按规则加入技术交流群,回复“1024”查看更多内容。
点击“阅读原文”查看更多分享。




