前面我们实现了单块的读写,在大批量连续读写时使用多块读写效率更高,所以我们继续来实现多块的读写,有了前面的基础,很快就能实现多块的读写,在原来的基础上主要考虑下多块间的处理。
对应的波形,使用DSView软件打开
通过百度网盘分享的文件:硬件SPI读写TF卡.dsl
链接:https://pan.baidu.com/s/1skq3waazsWMq_cpwY3aPzw?pwd=abqz
提取码:abqz
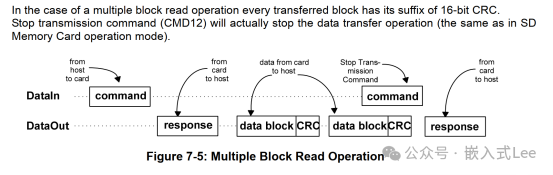
多块读命令
使用CMD18

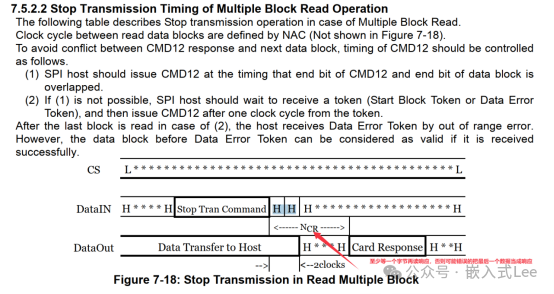
多块读流程,多了个CDM12 Stop命令操作

实现代码如下
int sd_read_mblock(sd_dev_st* dev, uint8_t* buffer, uint32_t block_addr, uint32_t count){uint8_t tmp = 0xff;uint32_t addr;uint8_t r1;uint8_t token;uint8_t crc[2];uint8_t cmd_buffer[6];int res;int timeout;if((dev == (sd_dev_st*)0) || (buffer == (uint8_t*)0) || (count == 0)){return -1;}if(dev->en_extclk){dev->transfer(&tmp,0,1);}dev->setcs(0);if(dev->en_extclk){dev->transfer(&tmp,0,1);}if(dev->ccs == 0){addr = block_addr * 512; /* SDSC使用字节地址 */}else{addr = block_addr; /* SDHC SDXC使用block地址 */}sd_set_command(cmd_buffer, 18, addr);dev->transfer(cmd_buffer,0,6); /* 6字节命令 */r1 = sd_read_r1(dev);if(r1 != 0xFF){for(uint32_t bn=0; bn{timeout = 100000/dev->check_interval;token = 0xFF;do{dev->transfer(0,&token,1);if(token == 0xFF){dev->delayus(dev->check_interval);}} while(((timeout--) > 0) && (token == 0xFF));if(timeout > 0){if(token == 0xFE){dev->transfer(0,buffer+bn*512,512);dev->transfer(0,crc,2);}else{res = -4;break;}}else{res = -3;break;}}/* stop */sd_set_command(cmd_buffer, 12, 0);dev->transfer(cmd_buffer,0,6); /* 6字节命令 *//* 等1个字节 */dev->transfer(&tmp,0,1);r1 = sd_read_r1(dev);if(r1 < 2){res = 0;}else{res = -5;}}else{res = -2;}if(dev->en_extclk){dev->transfer(&tmp,0,1);}dev->setcs(1);if(dev->en_extclk){dev->transfer(&tmp,0,1);}return res;}/*** @fn sd_read_mblock* 读多Block* @param[in] dev @ref sd_dev_st 指向设备实例* @param[out] buffer 存储读到的数据* @param[in] block_addr block地址* @param[in] count 需要读取的block数* @retval 0:成功* @retval -1:参数错误* @retval -2:R1超时* @retval -3:响应超时* @retval -4:start token超时* @retval -5:stop 未收到响应*/int sd_read_mblock(sd_dev_st* dev, uint8_t* buffer, uint32_t block_addr, uint32_t count);
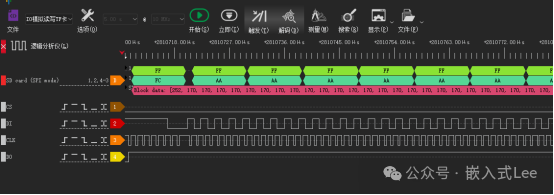
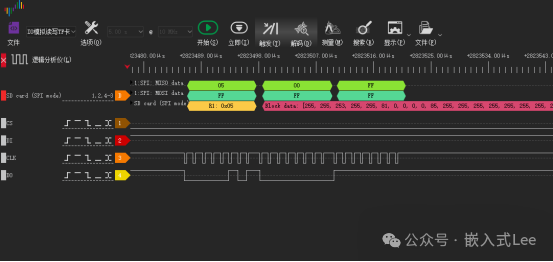
实测波形如下
发送命令52 00 00 00 00 A1从块0开始读,等到r1响应0x00
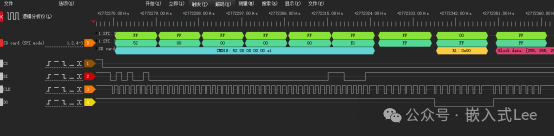
继续等响应0xFE,是0xFF则继续等
等待0xFE出现,读后面的数据
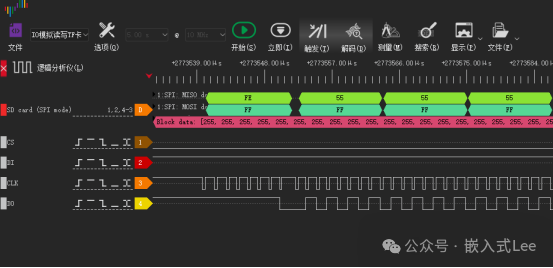
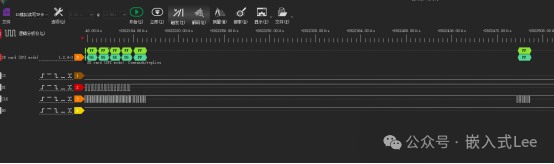
读到数据和2字节CRC,DA 80。后面是FF,继续等待下一个BLOCK的0xFE开始
等到下一个BLOCK的0xFE,读后面的数据和CRC
CRC是A521
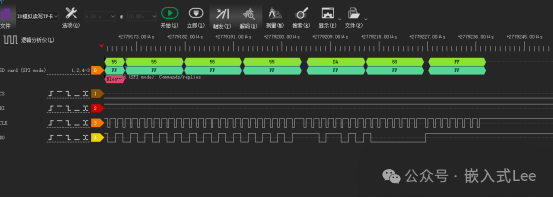
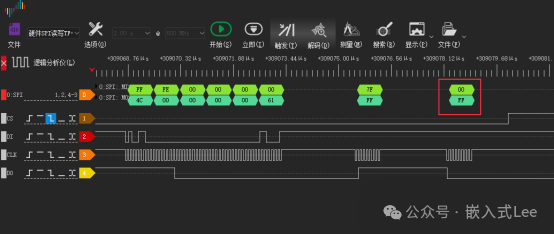
发送CMD12结束读
发送4C 00 00 00 00 61
多块写命令
使用CMD25

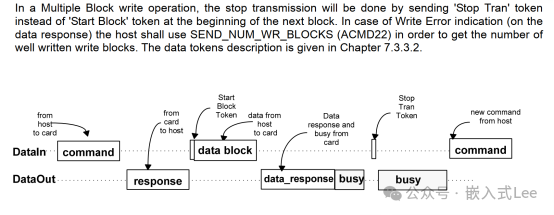
多块写流程,使用Stop Token0xFD结束写,注意StartToken不再是0xFE而是0xFC

实现代码如下
int sd_write_mblock(sd_dev_st* dev, uint8_t* buffer, uint32_t block_addr, uint32_t count){uint8_t tmp = 0xff;uint32_t addr;uint8_t r1;uint8_t token;uint8_t statrt_token = 0xFC;uint8_t stop_token = 0xFD;uint8_t cmd_buffer[6];int res;int timeout;if((dev == (sd_dev_st*)0) || (buffer == (uint8_t*)0) || (count == 0)){return -1;}if(dev->en_extclk){dev->transfer(&tmp,0,1);}dev->setcs(0);if(dev->en_extclk){dev->transfer(&tmp,0,1);}if(dev->ccs == 0){addr = block_addr * 512; /* SDSC使用字节地址 */}else{addr = block_addr; /* SDHC SDXC使用block地址 */}sd_set_command(cmd_buffer, 25, addr);dev->transfer(cmd_buffer,0,6); /* 6字节命令 */r1 = sd_read_r1(dev);if(r1 != 0xFF){for(uint32_t bn=0; bn{dev->transfer(&statrt_token, 0, 1); /* 发start token */dev->transfer(buffer+bn*512, 0, 512); /* 发数据 */timeout = 250000/dev->check_interval;token = 0xFF;do{dev->transfer(0,&token,1);if(token == 0xFF){dev->delayus(dev->check_interval);}} while(((timeout--) > 0) && (token == 0xFF));if(timeout > 0){if((token & 0x1F) == 0x05) /* 数据被设备接受 */{timeout = 250000/dev->check_interval;/* 等待变为非0,即非busy */do{dev->transfer(0,&token,1);if(token == 0x00){dev->delayus(dev->check_interval);}} while(((timeout--) > 0) && (token == 0));res = 0;}else{res = -4;break;}}else{res = -3;break;}}/* stop */dev->transfer(&stop_token, 0, 1); /* 发stop token *//* 等待一个字节 */dev->transfer(&tmp, 0, 1);/* 等待非busy */timeout = 250000/dev->check_interval;token = 0xFF;do{dev->transfer(0,&token,1);if(token == 0x00){dev->delayus(dev->check_interval);}} while(((timeout--) > 0) && (token == 0x00));if(token != 0x00){res = 0;}else{res = -5;}}else{res = -2;}if(dev->en_extclk){dev->transfer(&tmp,0,1);}dev->setcs(1);if(dev->en_extclk){dev->transfer(&tmp,0,1);}return res;}/*** @fn sd_write_mblock* 写多Block* @param[in] dev @ref sd_dev_st 指向设备实例* @param[in] buffer 存储待写的数据* @param[in] block_addr block地址* @param[in] count 需要写的block数* @retval -1:参数错误* @retval -2:R1超时* @retval -3:响应超时* @retval -4:数据未被接受* @retval -5:stop后busy超时*/int sd_write_mblock(sd_dev_st* dev, uint8_t* buffer, uint32_t block_addr, uint32_t count);
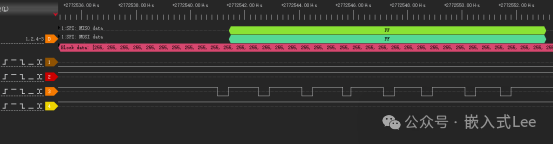
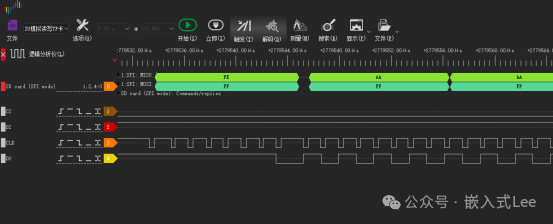
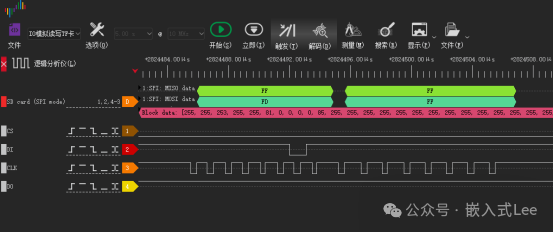
实测波形如下
发送59 00 00 00 00 03开始写,等待响应r1=0x00
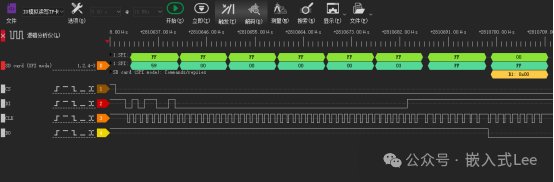
发送start 0xFC+数据
等待响应,为0xFF,继续等

等到0x05表示被卡接受,继续等待非0x00
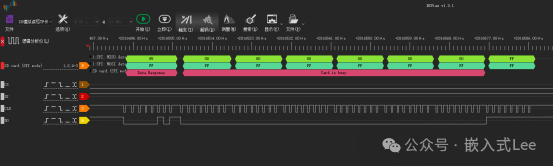
等待变为了非00,即非busy,继续下一块写
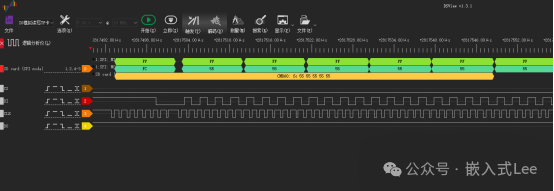
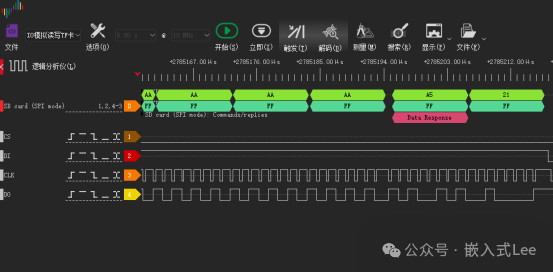
写完等响应
等到0x05响应表示被接受,继续等待非0x00
发送0xFD,结束

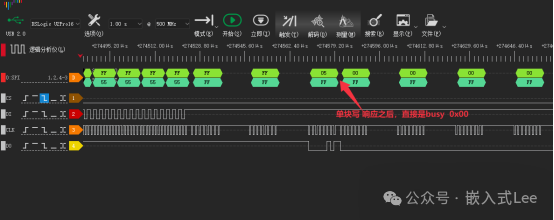
多块写注意发完0xFD Stop Token后不是马上回buys 0x00,而是中间会有0xFF。
注意与单块写的区别,单块写回响应之后,紧跟着busy 0x00.
测试代码如下
int sd_itf_init(void){static uint8_t s_read_buffer[2][512];if(0 == sd_init(&s_sd_dev)){/* 单块写 */memset(s_read_buffer[0],0x55,512);if(0 == sd_write_sblock(&s_sd_dev, s_read_buffer[0], 0x00000000)){}else{printf("write sblock err\r\n");}memset(s_read_buffer[1],0xAA,512);if(0 == sd_write_sblock(&s_sd_dev, s_read_buffer[1], 0x00000001)){}else{printf("write sblock err\r\n");}/* 单块读 */memset(s_read_buffer[0],0,512);memset(s_read_buffer[1],0,512);if(0 == sd_read_sblock(&s_sd_dev, s_read_buffer[0], 0x00000000)){printf("[DATA]\r\n");for (int i = 0; i < 512; ++i){if(i%16==0){printf("\r\n");}printf("0x%02x,",s_read_buffer[0][i]);}printf("\r\n");}else{printf("read sblock err\r\n");}if(0 == sd_read_sblock(&s_sd_dev, s_read_buffer[1], 0x00000001)){printf("[DATA]\r\n");for (int i = 0; i < 512; ++i){if(i%16==0){printf("\r\n");}printf("0x%02x,",s_read_buffer[1][i]);}printf("\r\n");}else{printf("read sblock err\r\n");}/* 多块读 */memset(s_read_buffer[0],0,512);memset(s_read_buffer[1],0,512);if(0 == sd_read_mblock(&s_sd_dev, (uint8_t*)s_read_buffer, 0x00000000, 2)){printf("[DATA]\r\n");for (int i = 0; i < 512*2; ++i){if(i%16==0){printf("\r\n");}printf("0x%02x,",((uint8_t*)s_read_buffer)[i]);}printf("\r\n");}else{printf("read mblock err\r\n");}/* 多块写 */memset(s_read_buffer[0],0xAA,512);memset(s_read_buffer[1],0x55,512);if(0 == sd_write_mblock(&s_sd_dev, (uint8_t*)s_read_buffer, 0x00000000, 2)){}else{printf("write mblock err\r\n");}/* 单块读 */memset(s_read_buffer[0],0,512);memset(s_read_buffer[1],0,512);if(0 == sd_read_sblock(&s_sd_dev, s_read_buffer[0], 0x00000000)){printf("[DATA]\r\n");for (int i = 0; i < 512; ++i){if(i%16==0){printf("\r\n");}printf("0x%02x,",s_read_buffer[0][i]);}printf("\r\n");}else{printf("read sblock err\r\n");}if(0 == sd_read_sblock(&s_sd_dev, s_read_buffer[1], 0x00000001)){printf("[DATA]\r\n");for (int i = 0; i < 512; ++i){if(i%16==0){printf("\r\n");}printf("0x%02x,",s_read_buffer[1][i]);}printf("\r\n");}else{printf("read sblock err\r\n");}}return 0;}
打印如下
多块读和单块读区别是多块读需要Stop命令来结束,
多块写和单块写区别是Start Token由0xFE变为了0xFC,且需要0xFD Token来结束。
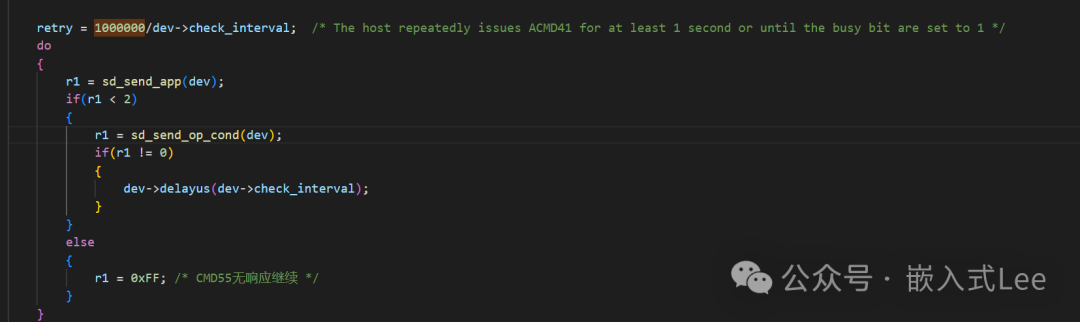
补充一个初始化的问题
ACMD1等待响应0x00时,超时时间要设置足够,按照规格书最大设置为1S。
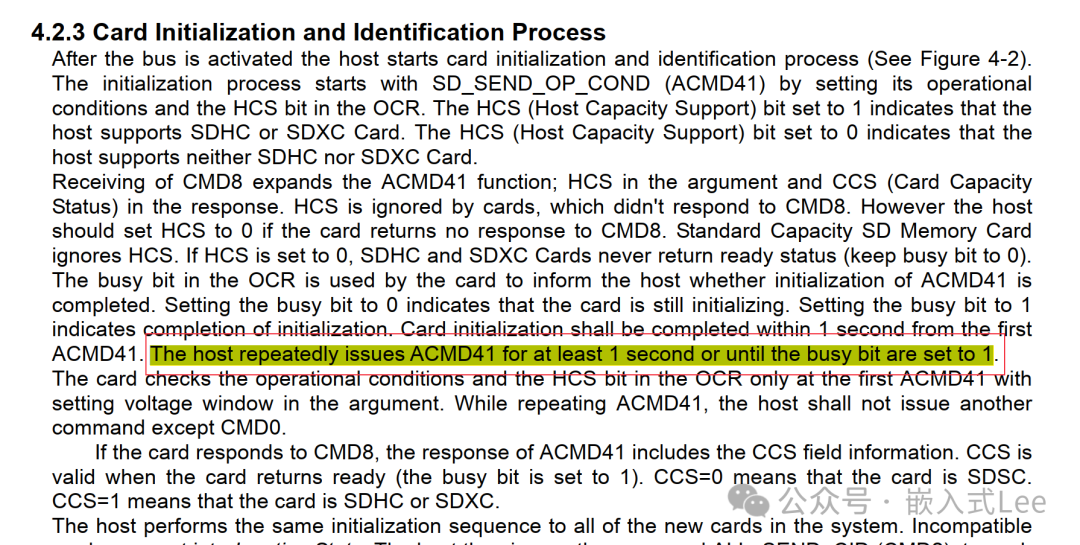 代码修改下超时时间为1S
代码修改下超时时间为1S