


芝能科技出品
电子电气架构已经成为现代汽车研发的核心领域之一。本文主要探讨车身域控制器(BDC)在这一进程中的发展与创新。
随着软件在车辆控制、信息娱乐系统及高级驾驶辅助系统(ADAS)中的作用愈发突出,OTA(Over-the-Air)技术和4G/5G通信变得至关重要,确保了实时更新和远程控制的可能。
通过分时租赁、网约车等模式提高车辆利用率,减轻城市交通压力和环境负担。车联网技术让车辆能够与交通基础设施、其他车辆及互联网服务相互联通,增强了行车安全和效率。
纯电动汽车、插电式混合动力汽车(PHEV)和混合动力汽车(HEV)等新能源动力系统的推广,推动了汽车产业向环保转型。集成先进传感器、控制系统和AI算法,实现自动驾驶和智能辅助驾驶功能。
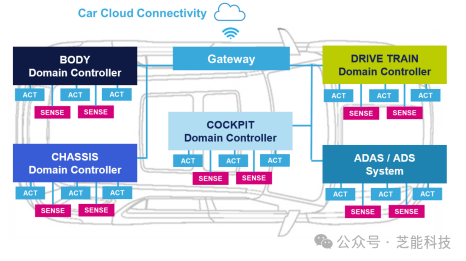
现代汽车的电子电气架构正在经历快速的演变,主要包括以下几种架构形式:
● 分布式架构:传统架构下各功能模块独立,通过总线通信,但随着功能增加,线束复杂度和成本也随之上升。
● 功能域与位置域结合:通过整合功能模块和位置模块,简化线束布局,提高集成度和可靠性。
● 位置域与中央计算/集成功能域:进一步集中化管理,适应更多样化的应用场景。
车身域控制器的布置需要考虑多个因素,包括车型定位、企业技术平台、开发周期和成本等。在这方面进行了深入的探索,通过合理布置域控制器和线束,实现系统的优化配置。
域控和线束的深度融合是提升整车集成度和降低成本的关键。通过线束深度介入,减少了inline(线内)的复杂度,提高了线束布局的合理性和整车的可靠性。
域控的开发模式多种多样,根据企业情况选择最适合的模式。主要开发模式包括OEM自研模式、Tier 1/2供应商合作模式等。不同模式各有优劣,需结合企业实际情况进行选择和应用。
● OEM自研模式:OEM自研模式是指整车制造商自主进行域控制器的开发,优势在于可以更好地控制产品质量和开发进度,但对企业技术能力要求较高。
● Tier 1/2合作模式:Tier 1/2合作模式是指整车制造商与一级或二级供应商合作开发域控制器,这种模式可以借助供应商的技术力量和经验,缩短开发周期,但需加强项目管理和协调。
域控开发是一项复杂的系统工程,涉及多个方面的挑战:技术决策需要快速落地执行,高效的决策组织是关键。域控开发过程中,Bug处理需要通过台架测试和整车测试快速迭代解决。
核心算法的开发和优化需要内外结合,如PEPS(无钥匙进入系统)、防夹系统、TPMS(胎压监测系统)、UWB(超宽带技术)等。EMC是域控开发中的重要环节,需要借助专家资源和顶尖厂家的技术支持。
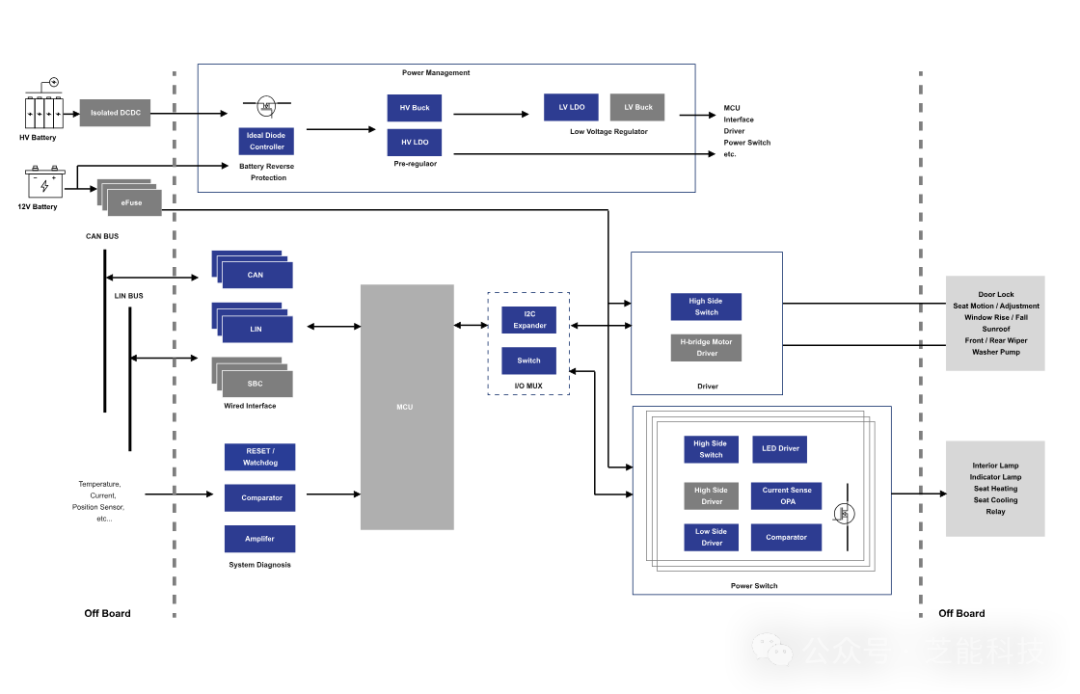
● NXP 半导体 S32K、S32R 系列
◎ 支持复杂的车载网络通信需求,如 CAN、LIN、FlexRay 等。
◎ 具备高级安全特性。
◎ 能满足车身控制、车载信息娱乐系统、驾驶辅助系统等领域的集成需求。
● 英飞凌 AURIX TM 系列
◎ 具备高性能多核处理能力。
◎ 具有高安全性能,适用于复杂和关键的汽车应用。
● 瑞萨电子 RX、RL78、RH850 系列
◎ 集成度高。
◎ 节能性能好,适用于低功耗应用。
● 车身域控的发展趋势主要包括以下几个方面:
◎ 以太网和CAN FD:以太网和CAN FD技术的发展为车身域控提供了更高的带宽和数据传输速率,提高了系统的可靠性和实时性。
◎ 高算力支撑高级别辅助驾驶:高算力的域控制器可以支撑更高级别的驾驶辅助系统和自动驾驶技术的发展。
◎ 6G网络:未来的6G网络将为车身域控提供更高的通信速率和更广的覆盖范围,支持更复杂的应用场景。
◎ 网络安全:随着车联网技术的发展,网络安全成为车身域控的重要考量因素,需要不断迭代和优化。
◎ 冗余和备份:车身域控系统需要具备冗余和备份功能,以提高系统的可靠性和安全性。
车身域控制器的发展和探索是现代汽车技术的重要组成部分,通过对车辆新四化的深入理解和电子电气架构的不断演进,车身域控制器在功能集成、系统优化和技术创新方面取得了显著进展。
随着高算力域控制器和先进网络技术的发展,车身域控将在自动驾驶、智能网联等方面发挥更加重要的作用。
