

点击左上角“锂电联盟会长”,即可关注!

01
内容概览
3D传感组件构造复杂:实现具有良好控制的传感组件3D分布的3D电子设备制造复杂,具有极大挑战性。
空间分辨率限制:在接近人体皮肤的空间分辨率下,难以解耦测量多种力学信号。
仿生三维布局:提出了一种新的三维结构电子皮肤(3DAE-Skin),其力和应变传感器模仿人体皮肤中Merkel细胞和Ruffini小体的三维布局。
解耦传感性能:3DAE-Skin展现出优异的压力、剪切力和应变的解耦传感性能。
集成深度学习算法:结合深度学习算法,实现了数据采集和处理模块,开发了一个触觉系统,可以通过简单触摸测量物体的模量和曲率。
食品新鲜度评估:通过触摸测量不同形状和新鲜度的水果、面包和蛋糕的模量,可以快速评估食品的新鲜程度。
人机交互和智能假肢:实时定量评估接触状态和物体信息,对于人机交互、人形机器人、智能假肢和自动检测仪器具有重要意义。
表面区分:通过测量摩擦系数,可以区分粗糙表面和光滑表面,应用于多种智能触觉系统。
作者通过受生物启发的3D结构设计、异质封装策略和微加工技术,开发了一种模仿人体皮肤中机械感受器三维分布的3DAE-Skin。这种仿生设计利用了力和应变传感组件的3D分布及电子皮肤中的工程刚度变化,实现了压力、剪切力和拉伸应变的解耦感知。结合深度学习算法,3DAE-Skin不仅具有人类皮肤相当的空间分辨率,还能够通过触摸同时测量物体的模量和曲率。这项技术在食品新鲜度评估、人机交互、智能假肢、自动检测仪器等领域具有重要应用前景,通过进一步优化设计和制备方法,3DAE-Skin可以广泛应用于其他类型的假肢和机器人系统。
文章名称:A three-dimensionally architected electronic skin mimicking human mechanosensation
期刊:Science
文章DOI:10.1126/science.adk5556
通讯作者:清华大学航院、柔性电子技术实验室张一慧(Yihui Zhang)教授
02
图文简介
在这项最新研究工作中,研究人员受人类皮肤中机械感受器的空间分布特征启发,提出了一种具有仿生三维架构的电子皮肤(3DAE-Skin)设计概念(如图1所示)。3DAE-Skin中的三维电路是由5×5个力传感单元和排列其间的40个应变传感单元(沿x、y方向各有20个)组成的阵列。
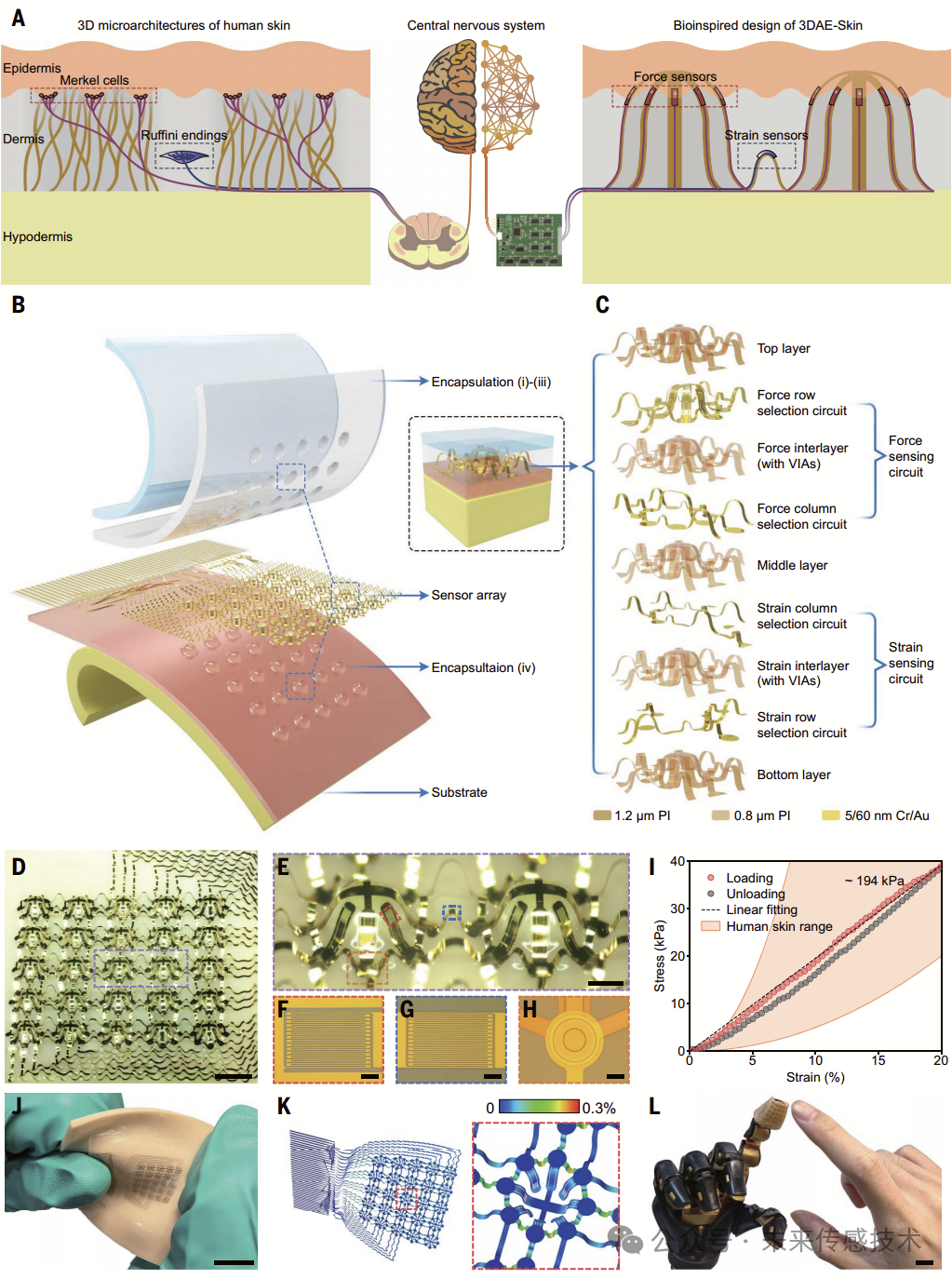
图1. 受生物启发设计和制备3DAE-Skin。(A) 3DAE-Skin的仿生设计概念示意图,涉及3DAE-Skin的结构与其人工触觉系统、人类皮肤和触觉系统的比较。(B) 整个3DAE-Skin器件的多层结构的扩展视图,包括传感器阵列和多层封装。(C) 代表性功能单元的扩展视图,其中四金电路被五层PI夹在中间以形成力和应变传感器。(D) 互连传感器阵列的图像。(E) 功能单元的放大视图。(F至H) 力传感器 (F) 和应变传感器 (G) ,以及具有垂直互连通道的键合点 (H)的放大视图。(I) 3DAE-Skin在拉伸测试下的机械响应,与橙色区域标记的人类皮肤相比。(J和K) 设备扭曲约60°的光学图像 (J) 和有限元分析结果 (K),表明其具有表明其具有良好的变形能力。(K) 中的颜色代表金电路中的最大主应变。 (L) 3DAE-Skin贴附到机械手指尖的光学图像。
视频S1
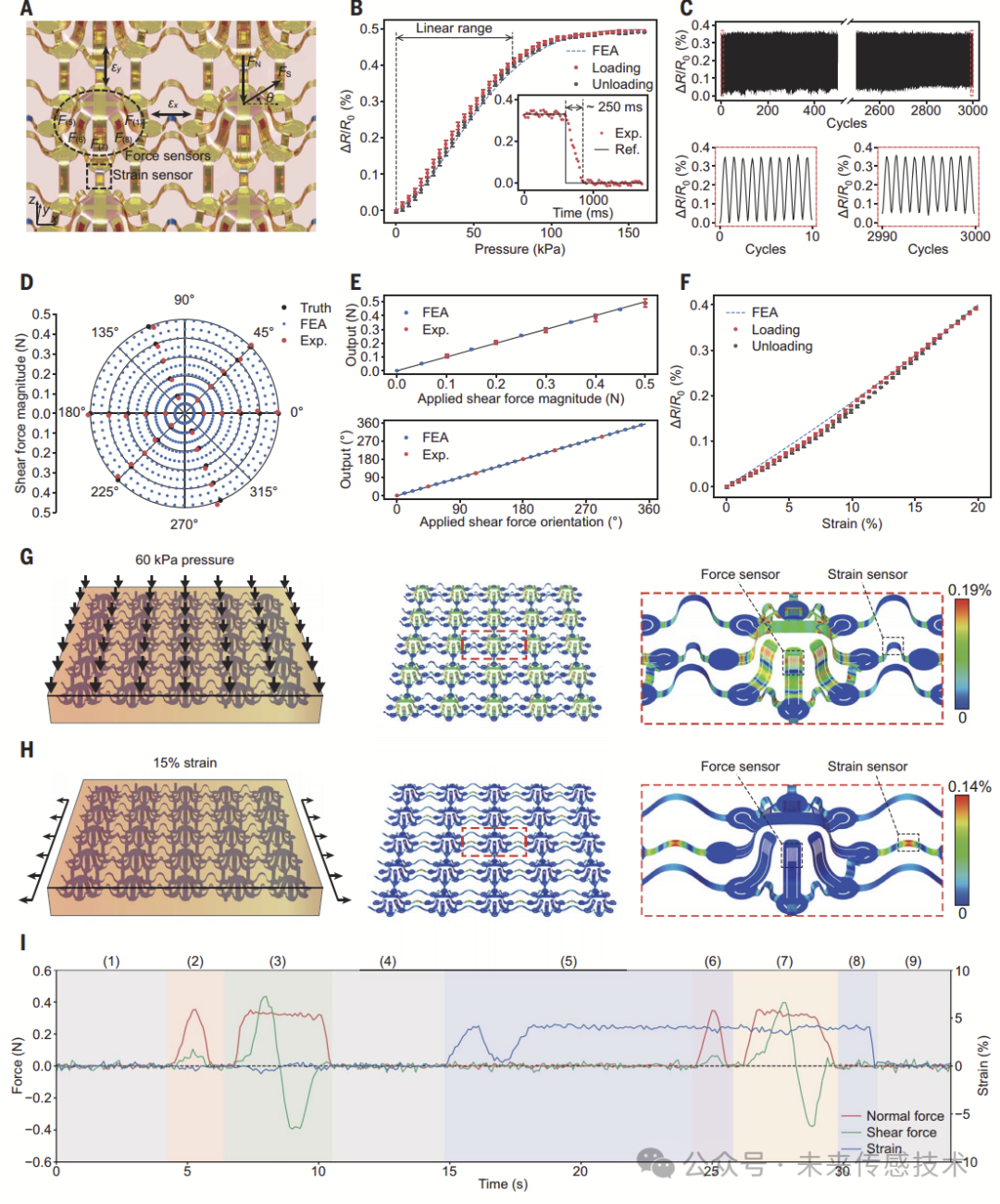
图2. 3DAE-Skin的解耦传感机理和性能。
视频S2
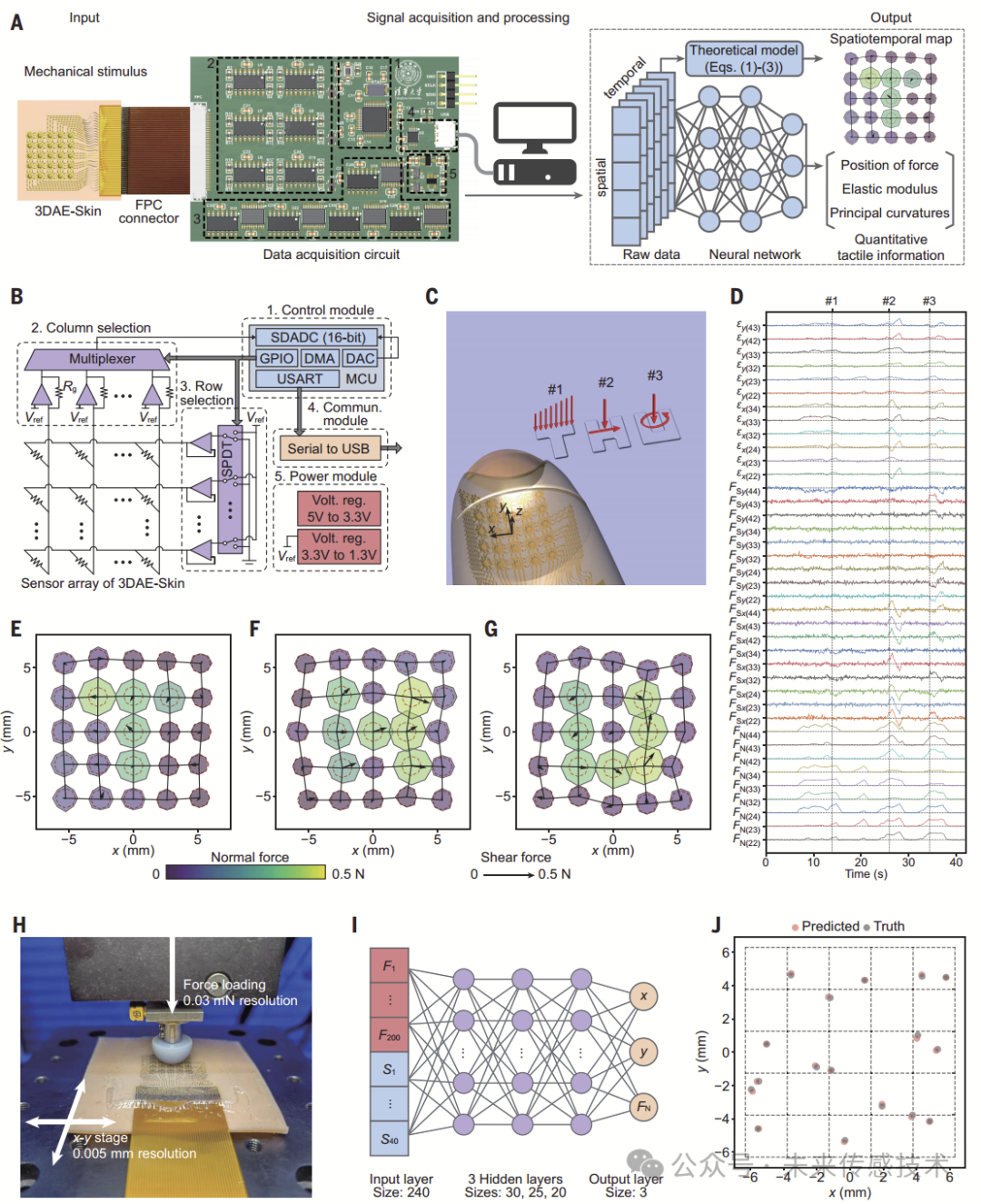
图3. 使用基于3DAE-Skin的触觉系统进行力和应变的时空映射。(A)3DAE-Skin基础触觉系统的示意图和工作机制。照片中的黑色虚线框表示电路的不同组件:(1)控制模块;(2)列选择模块;(3)行选择模块;(4)通信模块;(5)电源模块;一个单独的计算机用于DNN的训练和测试。(B)数据采集电路的框图,其中每个模块的数字表示(A)中对应标记的组件。(C)时空映射测试的示意图,人工手指配备集成3DAE-Skin触碰了“THU”三个字母,采用不同的加载模式。(D)在(C)中测试期间的典型信号的时间记录,包括来自9个选定单元的压力和剪切力(x和y轴)信号,以及来自12个选定单元的应变信号。(E至G)显示(C)中测试三个时刻的触觉感知。(H)用于收集数据以实现深度学习辅助的压力感应的空间超分辨率的实验设置的光学图像。(I)用于超分辨率感应的DNN模型的示意图。F,力传感器;S,应变传感器。(J)经过训练的DNN模型在部分测试集上对加载位置的预测结果。
视频S3
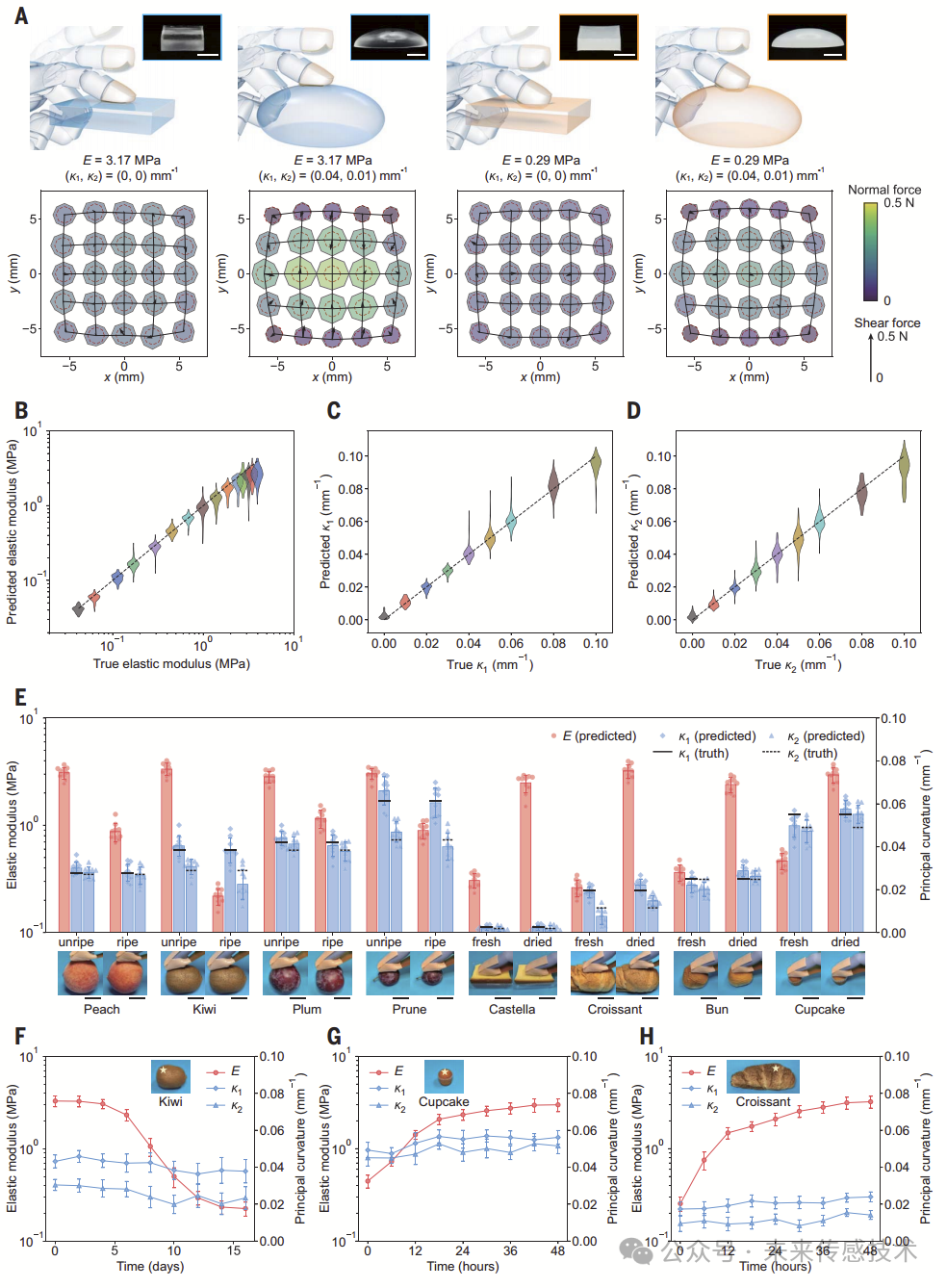
图4. 弹性模量和主曲率分量的同时定量测量。(A)当3DAE-Skin接触具有不同弹性模量(E)和由主曲率分量(k1和k2)表征的表面形状的四个标准样本时,可视化的触觉信息。第一行显示了具有实际样本光学图像的示意图。第二行显示了相应的时空映射图。(B至D)基于开发的触觉系统对弹性模量和主曲率分量的测试结果。共测试了765个具有不同弹性模量和表面形状的样本,以构建数据集。(E)对八种不同食物的弹性模量和主曲率分量的同时测量,包括四种水果(桃子、猕猴桃、李子和梅干),每种水果都具有不同程度的成熟度,以及四种面包/蛋糕(古斯塔、羊角面包、小圆面包和杯子蛋糕)在新鲜和干燥条件下。(F至H)对在空气中放置了16、2和2天的(F)猕猴桃、(G)杯子蛋糕和(H)羊角面包的弹性模量和主曲率的长期监测。
视频S4
03
文献来源
Zhi Liu et al.,A three-dimensionally architected electronic skin mimicking human mechanosensation.Science384,987-994(2024).DOI:10.1126/science.adk5556
