实不相瞒,我觉得这个芯片就有毛病设计的,寄存器也不多,数据输出也不是走数字接口,但是就要用SPI接口。尤其脑电这种东西两个芯片能够?真的裂开了。。。
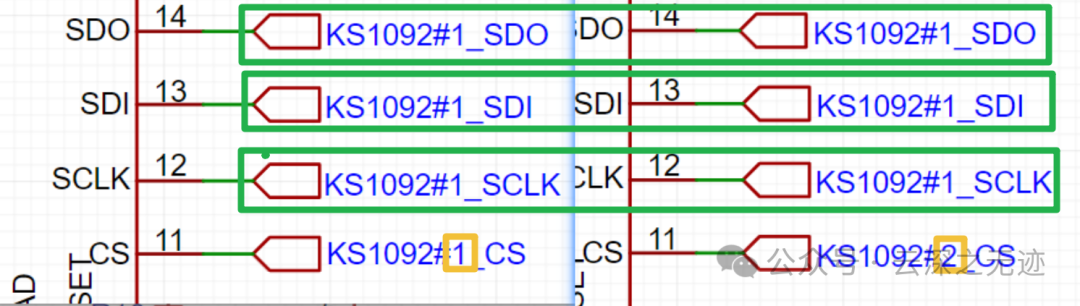
2个KS1092挂在同一个SPI上面,然后使用不同的CS控制
KS1092 采用带通放大器。由于高通滤波特性的超低截止频率,信号可能需要几秒钟才能稳定下来。当电极首次连接时,此稳定时间可能会给用户带来不受欢迎的延迟。
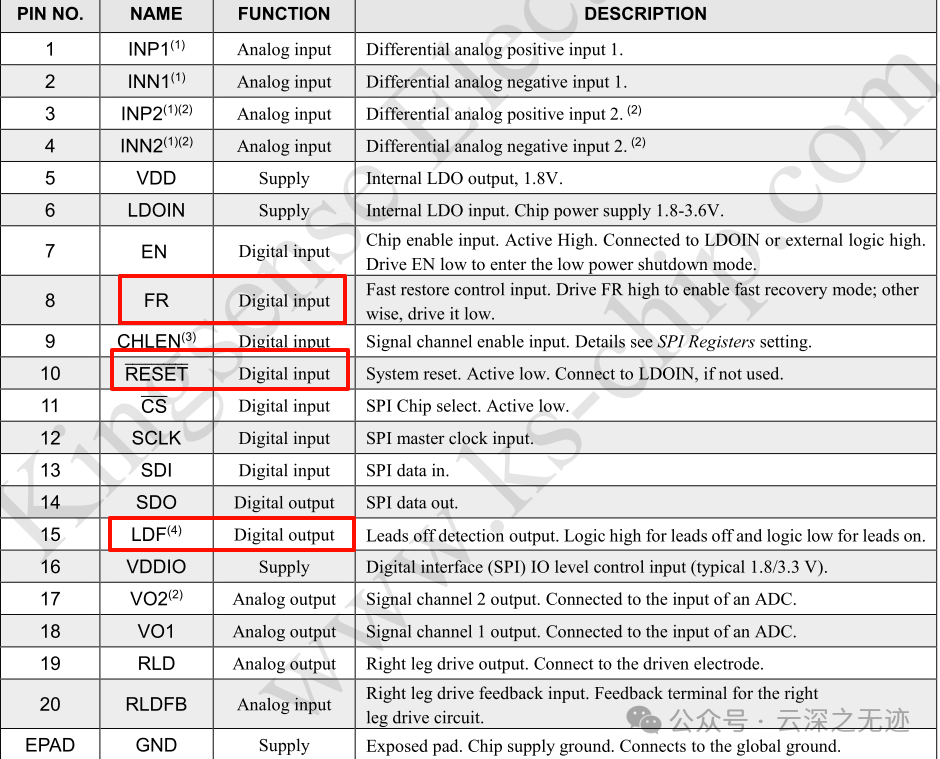
为了解决这个问题,KS1092 的快速恢复引脚 (PIN8: FR) 可以由外部信号控制。通过将 PIN8: FR 设置为高状态,将激活快速恢复模式。
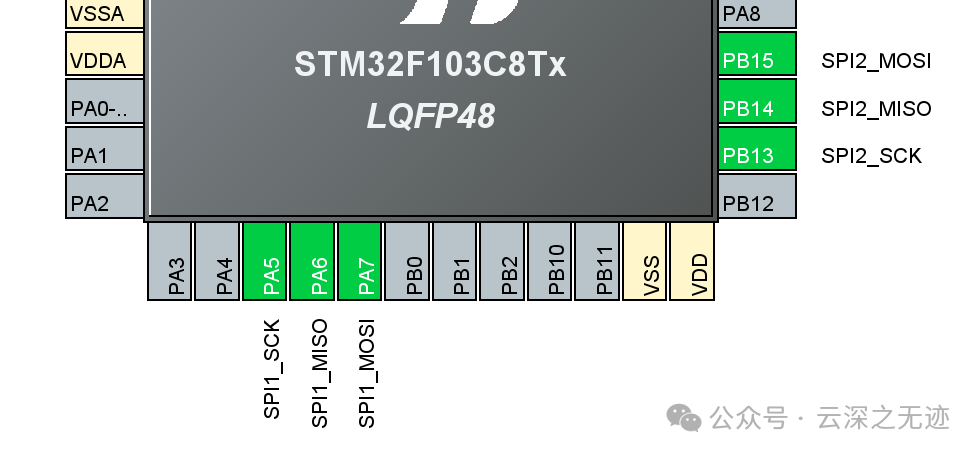
这个是STM32 上面的两个SPI接口
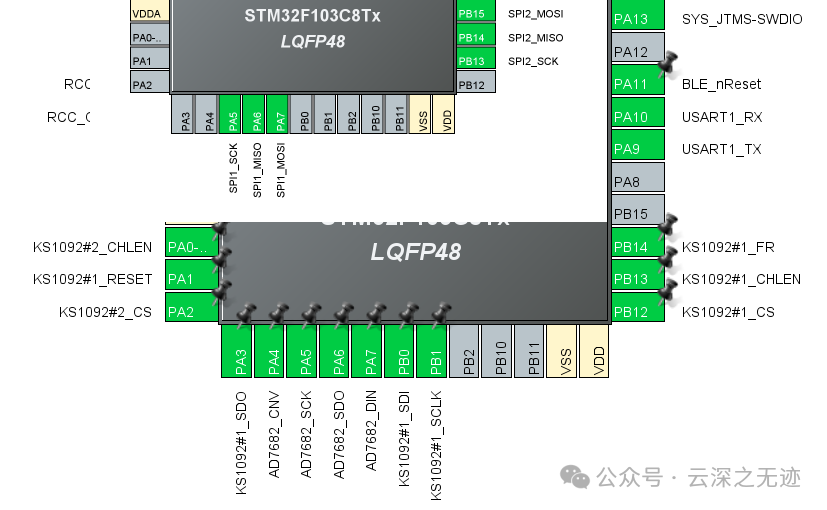
然后围绕下面的空余IO设置一下,完全使用IO模拟,不用硬件。

设置情况
大概就是这样

寄存器也就这样的
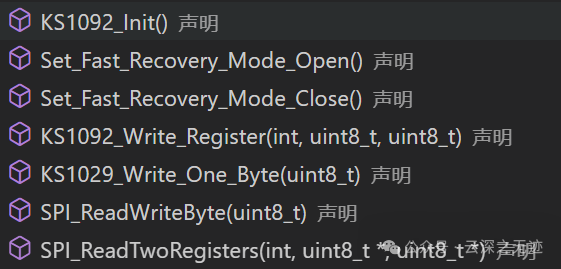
设计这样的函数,SPI单独的和封装的传感器读取写入,以及快速稳定
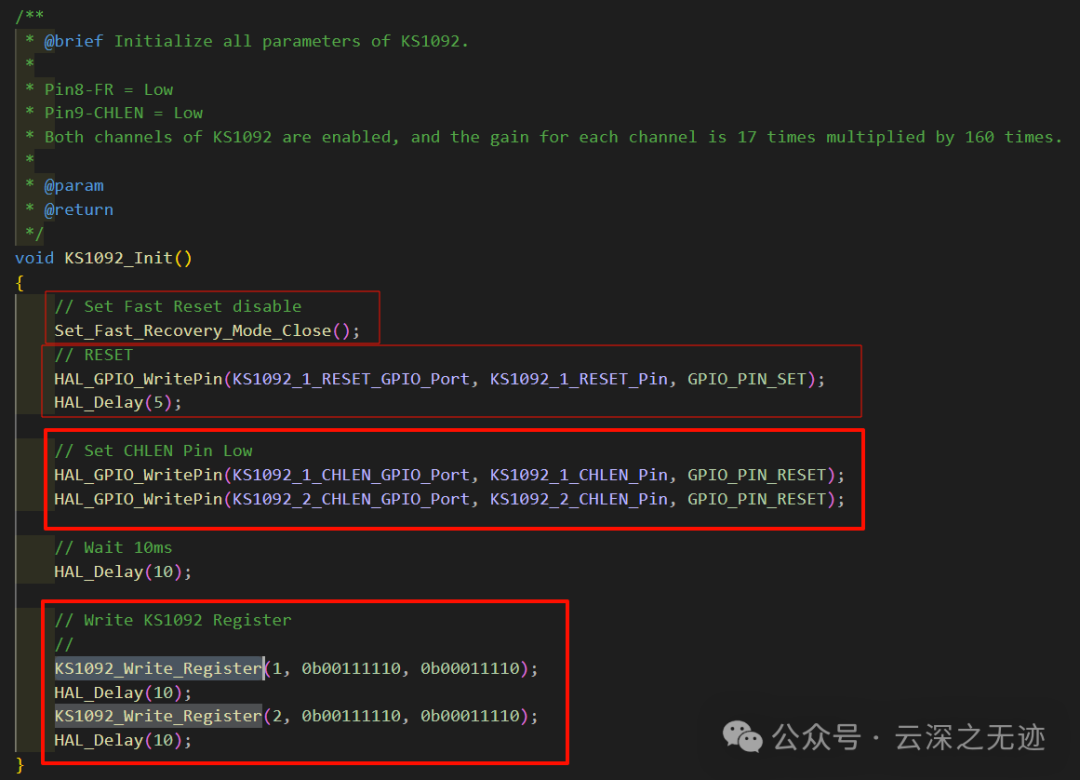
首先是初始化函数,按照数据手册的顺序开关对应的引脚,最后控制SPI
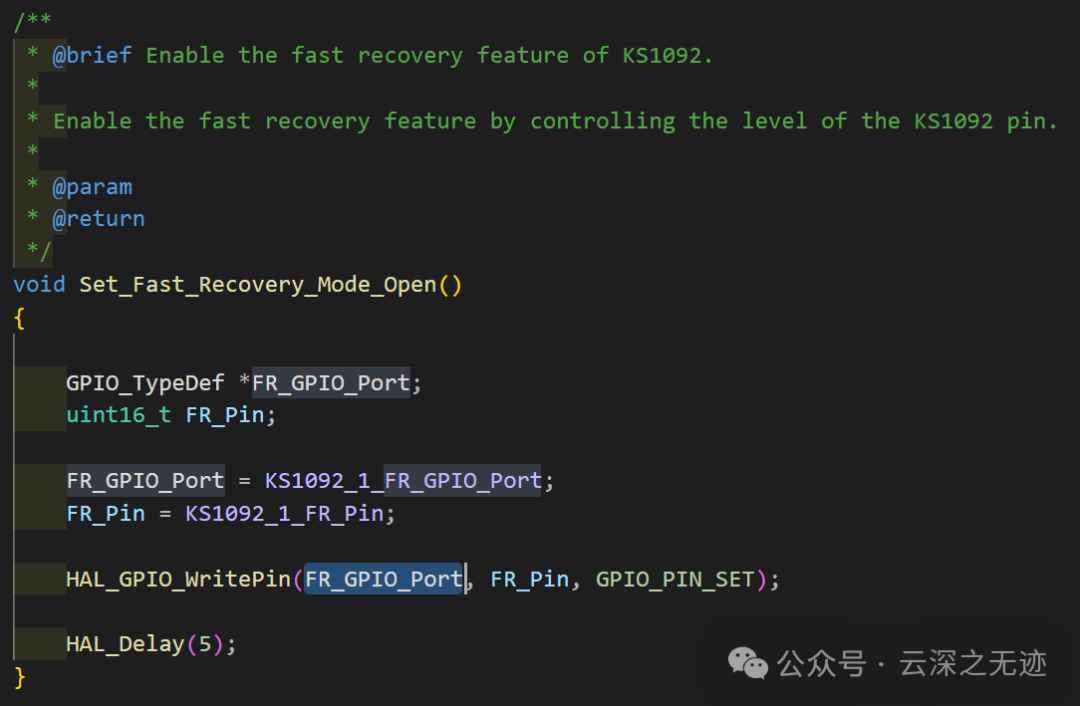
这个功能也简单,就是IO控制就行
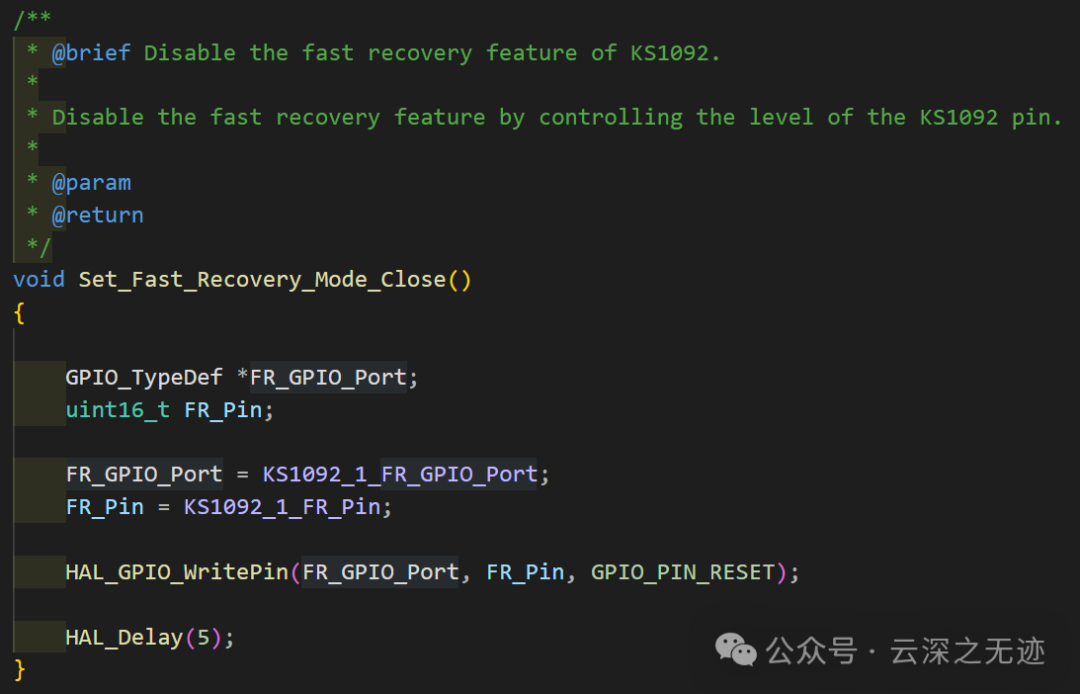
还有关
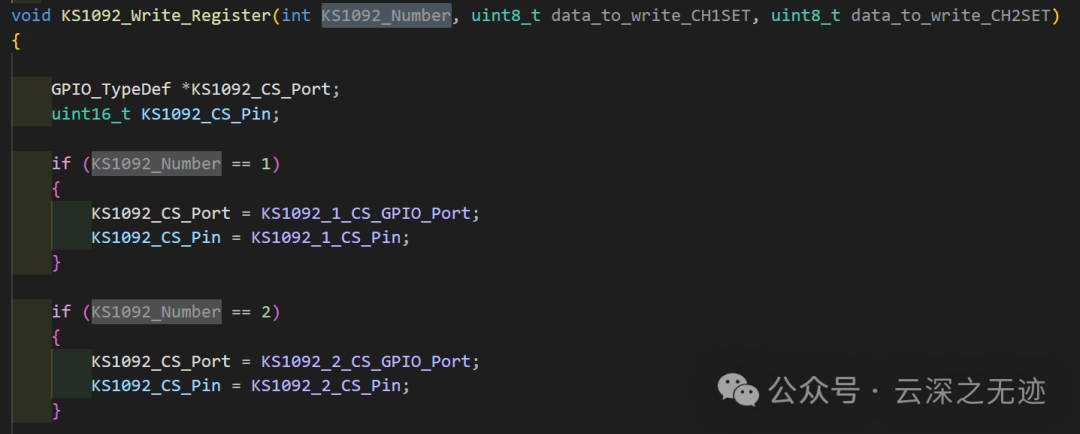
因为是多个器件,所以写了这样的函数,来手动控制对应的器件
void KS1029_Write_One_Byte(uint8_t Bytein){uint8_t Byte = Bytein;uint8_t len = 0;HAL_GPIO_WritePin(KS1092_1_SCLK_GPIO_Port, KS1092_1_SCLK_Pin, GPIO_PIN_SET); // SCLK Highfor (len = 0; len < 8; len++){if ((Byte & 0x80)){HAL_GPIO_WritePin(KS1092_1_SDI_GPIO_Port, KS1092_1_SDI_Pin, GPIO_PIN_SET); // SDI High}else{HAL_GPIO_WritePin(KS1092_1_SDI_GPIO_Port, KS1092_1_SDI_Pin, GPIO_PIN_RESET); // SDI Low}Byte = Byte << 1;Delay_us(5);HAL_GPIO_WritePin(KS1092_1_SCLK_GPIO_Port, KS1092_1_SCLK_Pin, GPIO_PIN_RESET); // SCLK LowDelay_us(5);HAL_GPIO_WritePin(KS1092_1_SCLK_GPIO_Port, KS1092_1_SCLK_Pin, GPIO_PIN_SET); // SCLK HighDelay_us(5);}}
uint8_t SPI_ReadWriteByte(uint8_t byte){uint8_t receivedByte = 0;for (int i = 0; i < 8; i++){// Generate clock rising edge for readingHAL_GPIO_WritePin(KS1092_1_SCLK_GPIO_Port, KS1092_1_SCLK_Pin, GPIO_PIN_SET);Delay_us(1);// Read MISO and store it in the lowest bit of the received bytereceivedByte <<= 1;if (HAL_GPIO_ReadPin(KS1092_1_SDO_GPIO_Port, KS1092_1_SDO_Pin) == GPIO_PIN_SET){receivedByte |= 0x01;}// Write data bit to MOSIif (byte & 0x80){HAL_GPIO_WritePin(KS1092_1_SDI_GPIO_Port, KS1092_1_SDI_Pin, GPIO_PIN_SET);}else{HAL_GPIO_WritePin(KS1092_1_SDI_GPIO_Port, KS1092_1_SDI_Pin, GPIO_PIN_RESET);}byte <<= 1; // Prepare the next bit to sendDelay_us(1);// Generate clock falling edge for writingHAL_GPIO_WritePin(KS1092_1_SCLK_GPIO_Port, KS1092_1_SCLK_Pin, GPIO_PIN_RESET);Delay_us(1);}return receivedByte;}
KS1029_Write_One_Byte函数实现了单字节的写操作
SPI_ReadWriteByte函数则实现了双向数据传输,既可以发送数据,也可以接收数据
----------------------------------------------------------------------
软件SPI:通过软件控制GPIO引脚实现SPI通信,灵活性高,但效率较低。
硬件SPI:使用微控制器内部的硬件SPI模块进行通信,效率高,速度快,但灵活性相对较低。
在代码里面运行这个就行
为了应对上面的情况,我也设计了一个MSPM0L1106+KS1092的单独方案,使用一颗MCU,将SPI转换为IIC,做到多个传感器一次挂在一个接口上面,节省IO以外还可以扩展多通道检测通道。至于什么时候写,看我时间。

