


main函数的返回值用于说明程序的退出状态。如果返回0,则代表程序正常退出。返回其它数字的含义则由系统决定。通常,返回非零代表程序异常退出。
有一些书上的,都使用了void main( ) ,其实这是错误的。C/C++ 中从来没有定义过void main( ) 。
C++ 之父 Bjarne Stroustrup 在他的主页上的 FAQ 中明确地写着 “The definition void main( ) { /* … */ } is not and never has been C++, nor has it even been C.” 这可能是因为 在 C 和 C++ 中,不接收任何参数也不返回任何信息的函数原型为“void foo(void);”。
可能正是因为这个,所以很多人都误认为如果不需要程序返回值时可以把main函数定义成void main(void) 。然而这是错误的!main 函数的返回值应该定义为 int 类型,C 和 C++ 标准中都是这样规定的。
虽然在一些编译器中,void main() 可以通过编译,但并非所有编译器都支持 void main() ,因为标准中从来没有定义过 void main 。
g++3.2 中如果 main 函数的返回值不是 int 类型,就根本通不过编译。而 gcc3.2 则会发出警告。所以,为了程序拥有很好的可移植性,一定要用 int main ()。测试如下:
#include <stdio.h>
void main()
{
printf("Hello world\n");
return;
}
运行结果:g++ test.c

那既然main函数只有一种返回值类型,那么是不是可以不写?规定:不明确标明返回值的,默认返回值为int,也就是说 main()等同于int main(),而不是等同于void main()。
在C99中,标准要求编译器至少给 main() 这种用法来个警告,而在c89中这种写法是被允许的。但为了程序的规范性和可读性,还是应该明确的指出返回值的类型。测试代码:
#include <stdio.h>
main()
{
printf("Hello world\n");
return 0;
}
运行结果:

在 C99 标准中,只有以下两种定义方式是正确的:
int main( void )
int main( int argc, char *argv[] )
若不需要从命令行中获取参数,就使用int main(void) ;否则的话,就用int main( int argc, char *argv[] )。当然参数的传递还可以有其他的方式,在下一节中,会单独来讲。
main 函数的返回值类型必须是 int ,这样返回值才能传递给程序的调用者(如操作系统),等同于 exit(0),来判断函数的执行结果。
C++89中定义了如下两种 main 函数的定义方式:
int main( )
int main( int argc, char *argv[] )
int main( ) 等同于 C99 中的 int main( void ) ;int main( int argc, char*argv[] ) 的用法也和C99 中定义的一样。同样,main函数的返回值类型也必须是int。
如果 main 函数的最后没有写 return 语句的话,C99 和c++89都规定编译器要自动在生成的目标文件中加入return 0,表示程序正常退出。
不过,建议你最好在main函数的最后加上return语句,虽然没有这个必要,但这是一个好的习惯。在linux下我们可以使用shell命令:echo $? 查看函数的返回值。
#include <stdio.h>
int main()
{
printf("Hello world\n");
}
运行结果:
同时,需要说明的是return的返回值会进行 类型转换,比如:若return 1.2 ;会将其强制转换为1,即真正的返回值是1,同理,return ‘a’ ;的话,真正的返回值就是97,;但是若return “abc”;便会报警告,因为无法进行隐式类型转换。
前文说到,main函数如果返回0,则代表程序正常退出。通常,返回非零代表程序异常退出。在本文的最后,测试一下: test.c:
#include <stdio.h>
int main()
{
printf("c 语言\n");
return 11.1;
}
在终端执行如下:
testSigpipe git:(master) vim test.c
testSigpipe git:(master) gcc test.c
testSigpipe git:(master) ./a.out && echo "hello world" #&&与运算,前面为真,才会执行后边的
c 语言
可以看出,操作系统认为main函数执行失败,因为main函数的返回值是11
testSigpipe git:(master) ./a.out
testSigpipe git:(master) echo $?
11
若将main函数中返回值该为0的话:
testSigpipe git:(master) vim test.c
testSigpipe git:(master) gcc test.c
testSigpipe git:(master) ./a.out && echo "hello world" #hello
c 语言
hello world
可以看出,正如我们所期望的一样,main函数返回0,代表函数正常退出,执行成功;返回非0,代表函数出先异常,执行失败。
首先说明的是,可能有些人认为main函数是不可传入参数的,但是实际上这是错误的。main函数可以从命令行获取参数,从而提高代码的复用性。
为main函数传参时,可选的main函数原形为:
int main(int argc , char* argv[],char* envp[]);
参数说明:
①、第一个参数argc表示的是传入参数的个数 。
②、第二个参数char* argv[],是字符串数组,用来存放指向的字符串参数的指针数组,每一个元素指向一个参数。各成员含义如下:
argv[0]:指向程序运行的全路径名。
argv[1]:指向执行程序名后的第一个字符串 ,表示真正传入的第一个参数。
argv[2]:指向执行程序名后的第二个字符串 ,表示传入的第二个参数。
…… argv[n]:指向执行程序名后的第n个字符串 ,表示传入的第n个参数。
规定:argv[argc]为NULL ,表示参数的结尾。
③、第三个参数char* envp[],也是一个字符串数组,主要是保存这用户环境中的变量字符串,以NULL结束。envp[]的每一个元素都包含ENVVAR=value形式的字符串,其中ENVVAR为环境变量,value为其对应的值。
envp一旦传入,它就只是单纯的字符串数组而已,不会随着程序动态设置发生改变。可以使用putenv函数实时修改环境变量,也能使用getenv实时查看环境变量,但是envp本身不会发生改变;平时使用到的比较少。
注意:main函数的参数char* argv[]和char* envp[]表示的是字符串数组,书写形式不止char* argv[]这一种,相应的argv[][]和 char** argv均可。
写个小测试程序,测试main函数的第三个参数:
#include <stdio.h>
int main(int argc ,char* argv[] ,char* envp[])
{
int i = 0;
while(envp[i++])
{
printf("%s\n", envp[i]);
}
return 0;
}
运行结果:部分截图
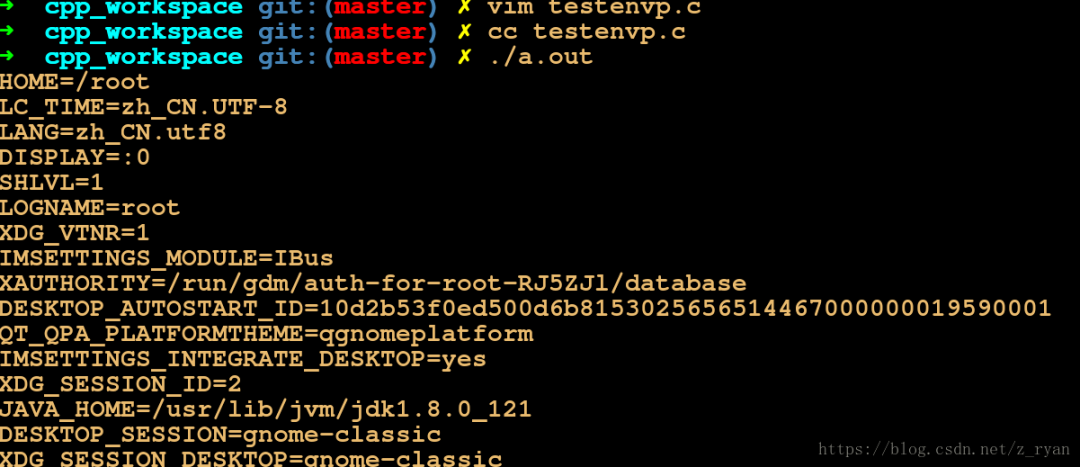
envp[] 获得的信息等同于Linux下env命令的结果。
在使用main函数的带参版本的时,最常用的就是:**int main(int argc , char* argv[]);**变量名称argc和argv是常规的名称,当然也可以换成其他名称。
命令行执行的形式为:可执行文件名 参数1 参数2 … … 参数n。可执行文件名称和参数、参数之间均使用空格隔开。
#include <stdio.h>
int main(int argc, char* argv[])
{
int i;
printf("Total %d arguments\n",argc);
for(i = 0; i < argc; i++)
{
printf("\nArgument argv[%d] = %s \n",i, argv[i]);
}
return 0;
}
运行结果:
cpp_workspace git:(master) vim testmain.c
cpp_workspace git:(master) gcc testmain.c
cpp_workspace git:(master) ./a.out 1 2 3 #./a.out为程序名 1为第一个参数 , 2 为第二个参数, 3 为第三个参数
Total 4 arguments
Argument argv[0] = ./a.out
Argument argv[1] = 1
Argument argv[2] = 2
Argument argv[3] = 3
Argument argv[4] = (null) #默认argv[argc]为null
可能有的人会说,这还用说,main函数肯定是程序执行的第一个函数。那么,事实果然如此吗?相信在看了本节之后,会有不一样的认识。
linux系统下程序的入口是”_start”,这个函数是linux系统库(Glibc)的一部分,当我们的程序和Glibc链接在一起形成最终的可执行文件的之后,这个函数就是程序执行初始化的入口函数。通过一个测试程序来说明:
#include <stdio.h>
int main()
{
printf("Hello world\n");
return 0;
}
编译:
gcc testmain.c -nostdlib # -nostdlib (不链接标准库)
程序执行会引发错误:/usr/bin/ld: warning: cannot find entry symbol _start; 未找到这个符号
所以说:
那么,这个_start和main函数有什么关系呢?下面我们来进行进一步探究。
_start函数的实现该入口是由ld链接器默认的链接脚本指定的,当然用户也可以通过参数进行设定。_start由汇编代码实现。大致用如下伪代码表示:
void _start()
{
%ebp = 0;
int argc = pop from stack
char ** argv = top of stack;
__libc_start_main(main, argc, argv, __libc_csu_init, __linc_csu_fini,
edx, top of stack);
}
对应的汇编代码如下:
_start:
xor ebp, ebp //清空ebp
pop esi //保存argc,esi = argc
mov esp, ecx //保存argv, ecx = argv
push esp //参数7保存当前栈顶
push edx //参数6
push __libc_csu_fini//参数5
push __libc_csu_init//参数4
push ecx //参数3
push esi //参数2
push main//参数1
call _libc_start_main
hlt
可以看出,在调用_start之前,装载器就会将用户的参数和环境变量压入栈中。
从_start的实现可以看出,main函数执行之前还要做一系列的工作。主要就是初始化系统相关资源:
Some of the stuff that has to happen before main():
set up initial stack pointer
initialize static and global data
zero out uninitialized data
run global constructors
Some of this comes with the runtime library's crt0.o file or its __start() function. Some of it you need to do yourself.
Crt0 is a synonym for the C runtime library.
1.设置栈指针
2.初始化static静态和global全局变量,即data段的内容
3.将未初始化部分的赋初值:数值型short,int,long等为0,bool为FALSE,指针为NULL,等等,即.bss段的内容
4.运行全局构造器,类似c++中全局构造函数
5.将main函数的参数,argc,argv等传递给main函数,然后才真正运行main函数
下面,我们就来说说在mian函数执行之前到底会运行哪些代码:(1)全局对象的构造函数会在main 函数之前执行。
(2)一些全局变量、对象和静态变量、对象的空间分配和赋初值就是在执行main函数之前,而main函数执行完后,还要去执行一些诸如释放空间、释放资源使用权等操作
(3)进程启动后,要执行一些初始化代码(如设置环境变量等),然后跳转到main执行。全局对象的构造也在main之前。
(4)通过关键字attribute,让一个函数在主函数之前运行,进行一些数据初始化、模块加载验证等。
①、通过关键字attribute
#include <stdio.h>
__attribute__((constructor)) void before_main_to_run()
{
printf("Hi~,i am called before the main function!\n");
printf("%s\n",__FUNCTION__);
}
__attribute__((destructor)) void after_main_to_run()
{
printf("%s\n",__FUNCTION__);
printf("Hi~,i am called after the main function!\n");
}
int main( int argc, char ** argv )
{
printf("i am main function, and i can get my name(%s) by this way.\n",__FUNCTION__);
return 0;
}
②、全局变量的初始化
#include <iostream>
using namespace std;
inline int startup_1()
{
cout<<"startup_1 run"<<endl;
return 0;
}
int static no_use_variable_startup_1 = startup_1();
int main(int argc, const char * argv[])
{
cout<<"this is main"<<endl;
return 0;
}
至此,我们就聊完了main函数执行之前的事情,那么,你是否还以为main函数也是程序运行的最后一个函数呢?
结果当然不是,在main函数运行之后还有其他函数可以执行,main函数执行完毕之后,返回到入口函数,入口函数进行清理工作,包括全局变量析构、堆销毁、关闭I/O等,然后进行系统调用结束进程。
1、全局对象的析构函数会在main函数之后执行; 2、用atexit注册的函数也会在main之后执行。
原形:
int atexit(void (*func)(void));
atexit 函数可以“注册”一个函数,使这个函数将在main函数正常终止时被调用,当程序异常终止时,通过它注册的函数并不会被调用。
编译器必须至少允许程序员注册32个函数。如果注册成功,atexit 返回0,否则返回非零值,没有办法取消一个函数的注册。
在 exit 所执行的任何标准清理操作之前,被注册的函数按照与注册顺序相反的顺序被依次调用。每个被调用的函数不接受任何参数,并且返回类型是 void。被注册的函数不应该试图引用任何存储类别为 auto 或 register 的对象(例如通过指针),除非是它自己所定义的。
多次注册同一个函数将导致这个函数被多次调用。函数调用的最后的操作就是出栈过程。main()同样也是一个函数,在结束时,按出栈的顺序调用使用atexit函数注册的,所以说,函数atexit是注册的函数和函数入栈出栈一样,是先进后出的,先注册的后执行。通过atexit可以注册回调清理函数。可以在这些函数中加入一些清理工作,比如内存释放、关闭打开的文件、关闭socket描述符、释放锁等等。
#include<stdio.h>
#include<stdlib.h>
void fn0( void ), fn1( void ), fn2( void ), fn3( void ), fn4( void );
int main( void )
{
//注意使用atexit注册的函数的执行顺序:先注册的后执行
atexit( fn0 );
atexit( fn1 );
atexit( fn2 );
atexit( fn3 );
atexit( fn4 );
printf( "This is executed first.\n" );
printf("main will quit now!\n");
return 0;
}
void fn0()
{
printf( "first register ,last call\n" );
}
void fn1(
{
printf( "next.\n" );
}
void fn2()
{
printf( "executed " );
}
void fn3()
{
printf( "is " );
}
void fn4()
{
printf( "This " );
}
作者:z_ryan
原文:https://blog.csdn.net/z_ryan/category_7316855.html
免责声明:本文来源网络,免费传达知识,版权归原作者所有。如涉及作品版权问题,请联系我进行删除。
以上就是本次的分享,如果觉得文章不错,转发、在看,也是我们继续更新的动力。
猜你喜欢:
2020年精选原创笔记汇总
Linux 的启动流程
1024G 嵌入式资源大放送!包括但不限于C/C++、单片机、Linux等。在公众号聊天界面回复1024,即可免费获取!

