无位置传感器算法的核心在于通过分析电机内部的电气信号来间接推断转子的位置和速度。这些算法通常利用电机的电压、电流反馈以及内置的数学模型来计算转子的状态。最常见的无位置传感器算法包括基于反电动势(Back Electromotive Force, BEMF)的方法、观测器方法和高频注入法等,每种算法都有不同的优缺点,本文主要介绍比较常见的BEMF的方法,也是相对比较成熟也易于实现的一种算法。
基本原理
当电机旋转时,定子绕组会产生与转速成正比的反电动势。通过监测这个反电动势的大小和相位,可以推断出转子的位置。
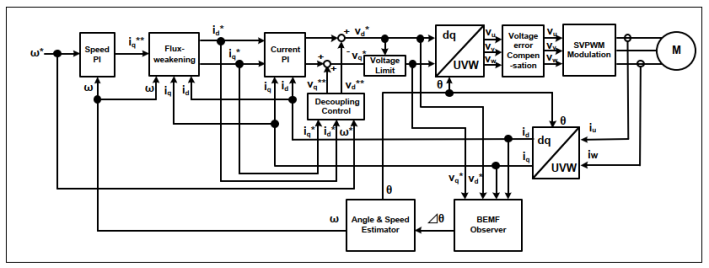
使用BEMF观测器的无传感器矢量控制的框图
基于DQ轴的电机电压方程如下:

将![]() 和
和![]() 作为电压扰动,它们分别写成
作为电压扰动,它们分别写成![]() 则上式可写为:
则上式可写为:

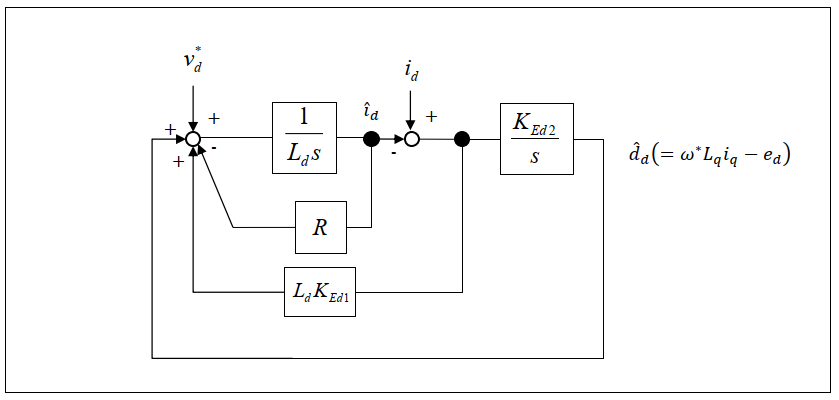
则DQ轴的观测器框图分别如下:

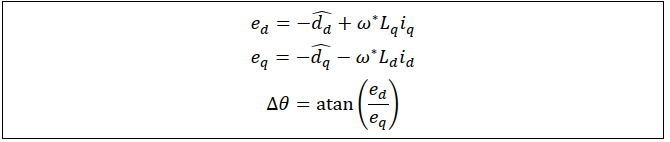
接下来,根据估计的电压扰动![]() 计算BEMF,如下所示:
计算BEMF,如下所示:
为了提高系统的鲁棒性,可以加入如下PLL:

仿真模型和仿真结果
dq轴的估计方程重写如下:


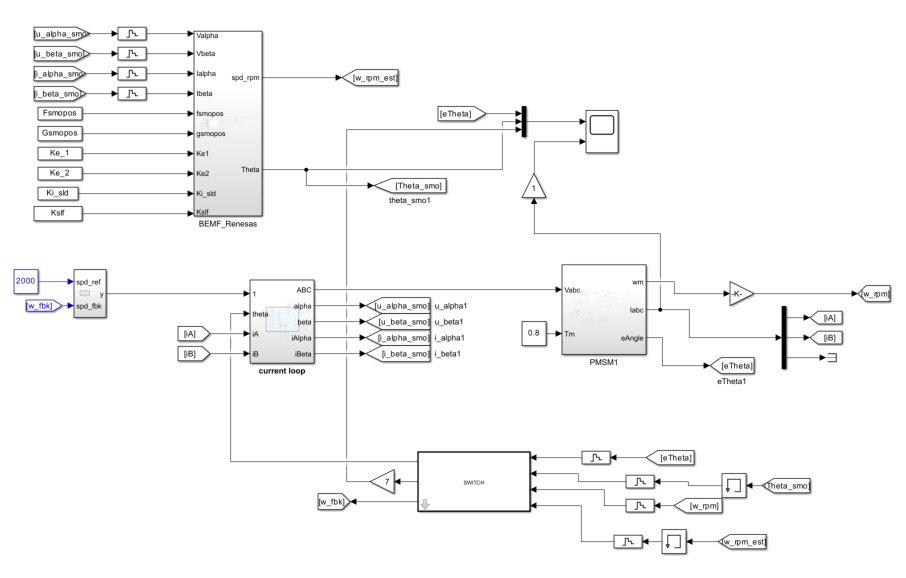
根据上式搭建仿真模型如下:
电机正常启动后切换到无位置传感器控制方式,切换前后角度的变化和电流变化如下图:
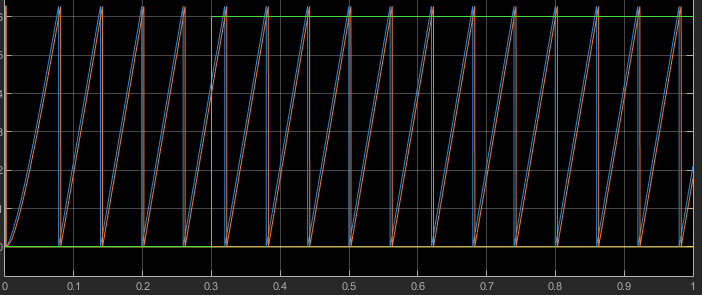
电角度波形
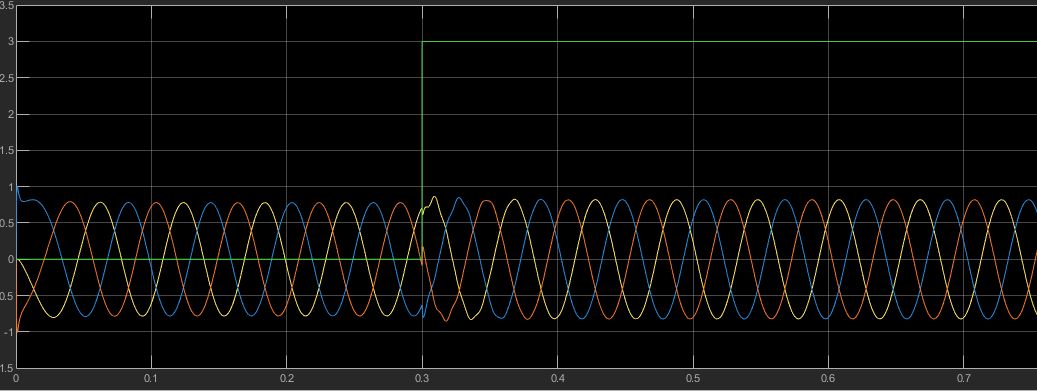
三相电流波形
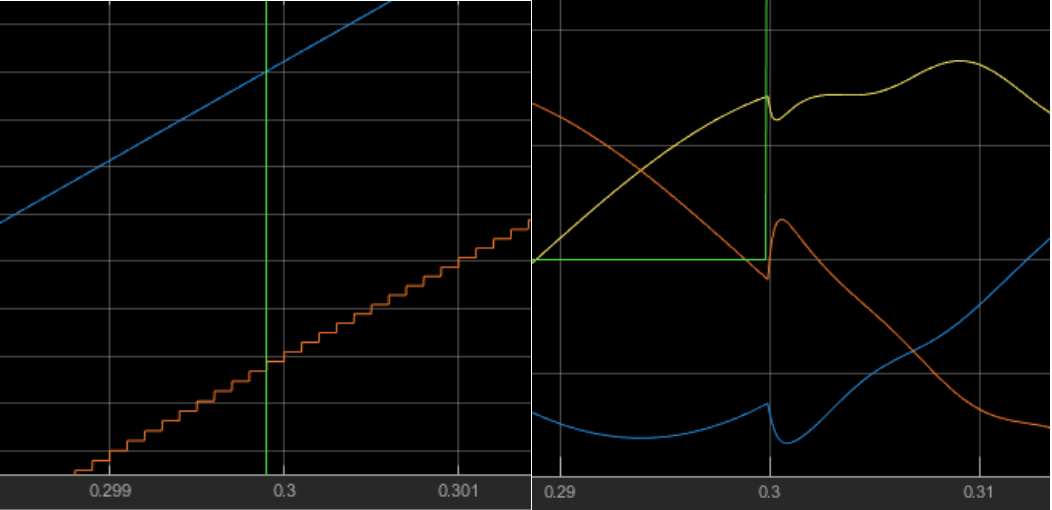
算法切换时刻角度和电流变化
从仿真看在从有位置传感器切换到无位置传感器方案后,观测角度几乎没有波动,电流有轻微的波动后,很快就稳定。仿真结果验证了该算法的有效性。
资料详细内容可参考:
https://www.renesas.cn/cn/zh/document/apn/sensorless-vector-control-permanent-magnet-synchronous-motor-algorithm-rev102

如您在使用瑞萨MCU/MPU产品中有任何问题,可识别下方二维码或复制网址到浏览器中打开,进入瑞萨技术论坛寻找答案或获取在线技术支持。
https://community-ja.renesas.com/zh/forums-groups/mcu-mpu/
1
END
1
推荐阅读
解决方案 | 基于RX13T的风扇电机控制方案
RZ/T2M双电机解决方案操作方法介绍
研讨会回顾 | 瑞萨电机驱动与AI实时检测融合的解决方案