点击蓝字 关注我们
SUBSCRIBE to US
FABORATORY AT YALE
在人类不能做到的许多事情中(如果没有一些较大的调整),首当其冲就是根据需要改变我们自身的身体形态。谈论自我截肢之类的事情听起来有点极端,但其他动物这样做也并不罕见——例如,蜥蜴可以自断尾巴以躲避捕食者。当蚂蚁在遇到无法单靠自己的力量足以克服的障碍时,它们会召唤同伴,然后协调工作完成任务,甚至用自己的身体搭建桥梁,允许其它蚂蚁穿越相对较大的间隙。
在一篇新论文中,来自耶鲁大学实验室的机器人专家赋予了软机器人自我分离和重新连接自身碎片的能力,并在必要时编辑其身体形态。看着有点怪异,但这让我有点(作者,以下简称我)希望我也能这么做。
FABORATORY AT YALE
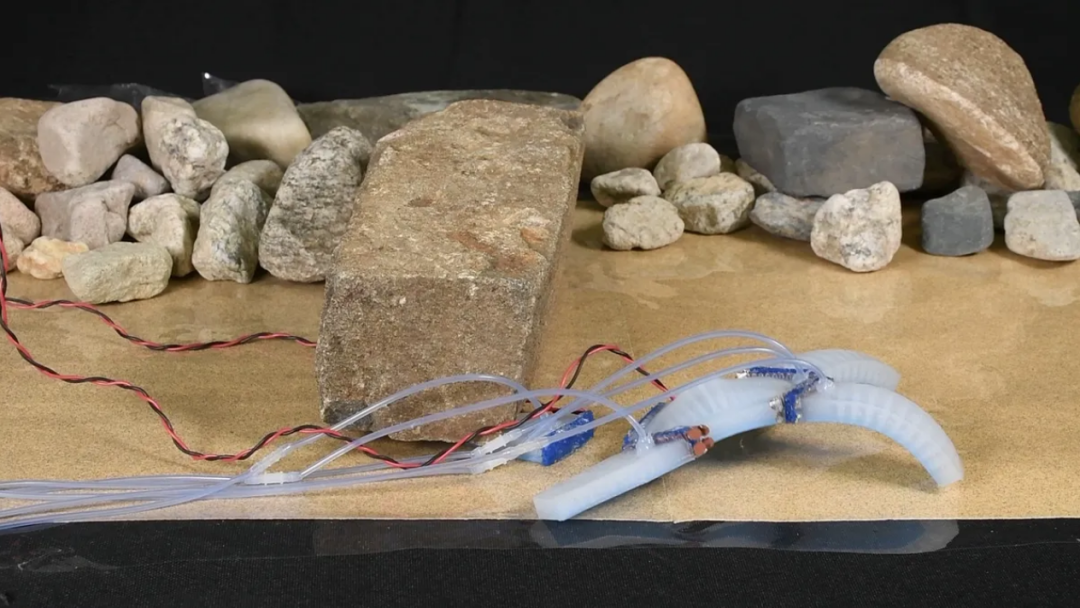
这些是相当标准的软体硅机器人,它们使用不对称的刚性气室进行充气和放气(使用系留泵和阀门)以产生行走或爬行运动。这里的新功能是接头,它依靠一种称为双连续热塑性泡沫(BTF,bicontinuous thermoplastic foam)的新材料来形成粘性聚合物的支撑结构,该聚合物在室温下是固体,但很容易熔化。
BTF的作用和海绵一样,可以防止聚合物在熔化时到处流出,这意味着你可以通过熔化接头将两个BTF表面拉开,然后通过逆过程将它们再次粘在一起。该过程大约需要10分钟,由此产生的关节非常坚固。在降解之前,它也适用于几百个分离/重新连接循环。它甚至可以很好地承受污垢和水。
FABORATORY AT YALE
这种事情以前已经用机械连接和磁铁以及其他类似的东西做过——毕竟,让机器人连接到其他机器人并与其他机器人分离是模块化机器人的基础技术。但这些系统本质上是刚性的,这对软体机器人来说是不利的,因为软体机器人的全部目的就是不具有刚性。当然,这一切都是初步的,因为有很多刚性的东西附着在这些机器人上,比如管子、电线等等。而且这里也没有自主性或有效载荷。然而,这不是重点——关键是关节,(正如研究人员所指出的那样,)它是“完全软的可逆关节的第一个实例”,导致“软人工系统的潜力[可以]通过质量加法和减法来改变形状。
耶鲁大学的 Bilige Yang、Amir Mohammadi Nasab、Stephanie J. Woodman、Eugene Thomas、Liana G. Tilton、Michael Levin和Rebecca Kramer-Bottiglio合著的文章“Self-Amputating and Interfusing Machines”于 5 月发表在Advanced Materials上。

微信号|IEEE电气电子工程师学会
新浪微博|IEEE中国
· IEEE电气电子工程师学会 ·
往
期
推
荐
以太网的下一个里程碑已经到来——800Gbps!
新的人工智能项目旨在模拟人类新皮质
冷却新方案 将计算机浸入合成的非导电油中
NASA批准发射“人造星”任务
