在昨天的蔚来汽车创新科技日上,我们看到了围绕技术创新的核心价值——让智能化与软件成为驱动品牌发展的关键力量。在这次发布中,整车操作系统的作用被赋予了更重要的地位:蔚来推出了SkyOS·天枢整车全域操作系统,这一系统如同一个全能的工具箱,集成了车辆的各项功能。
本文将分别从SkyOS·天枢整车全域操作系统、Banyan 3智能系统和智能驾驶三个方面来分析。本次科技日还发布了第二代蔚来手机NIO Phone,手机不仅有技术价值,还承载着情感价值,比较适合单独进行深入探讨,本文暂不涉及。
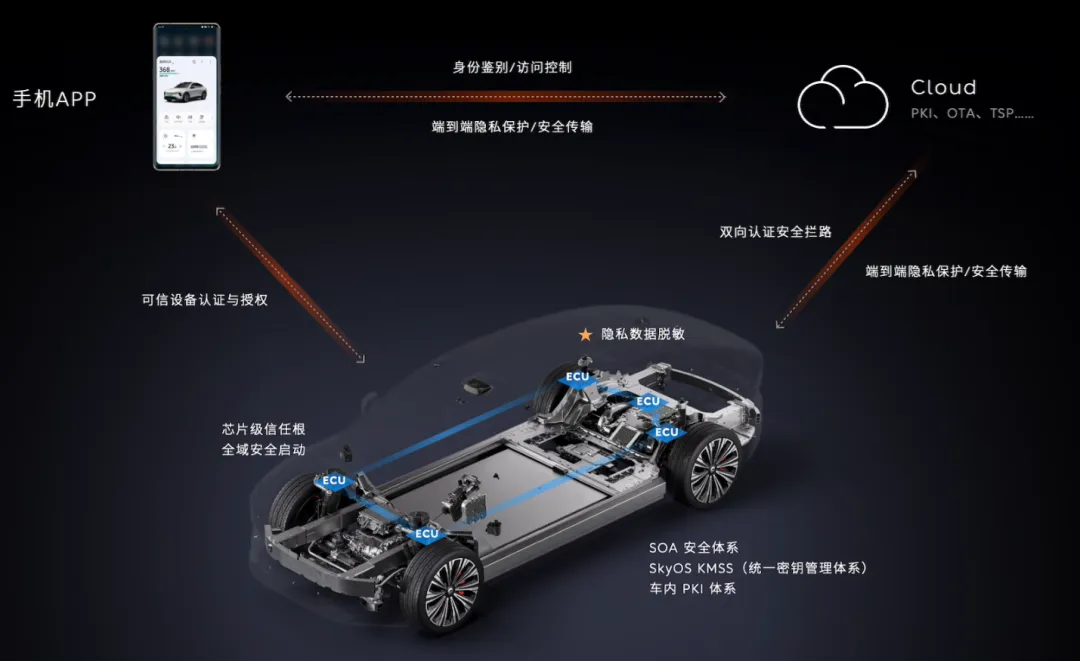
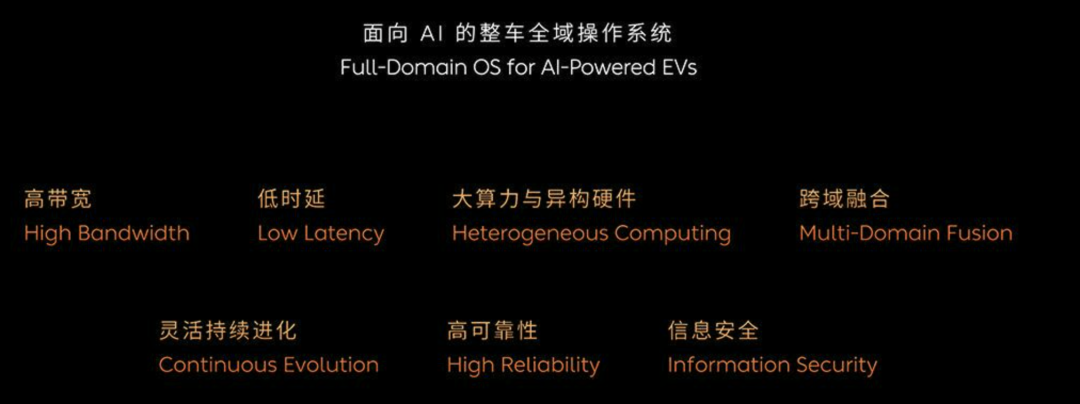
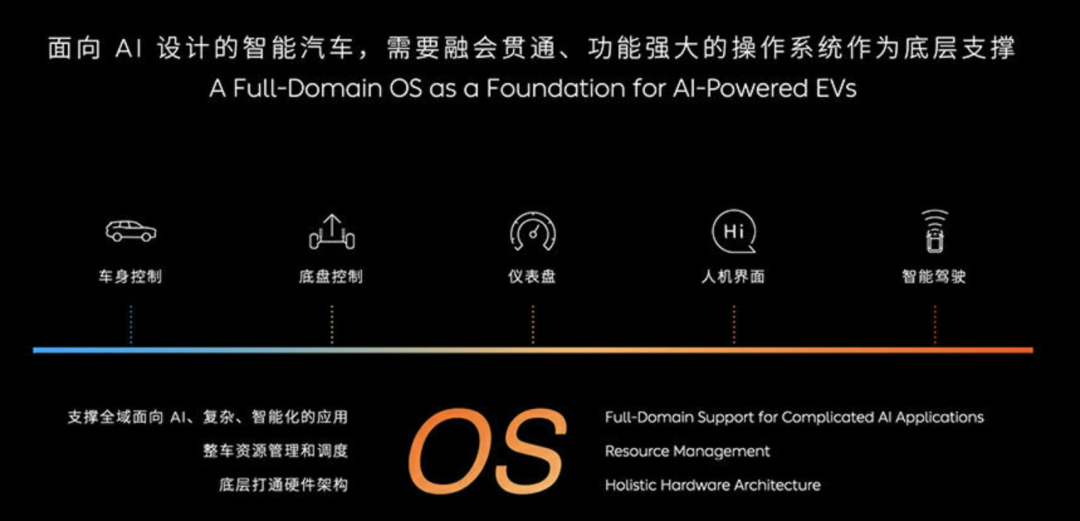
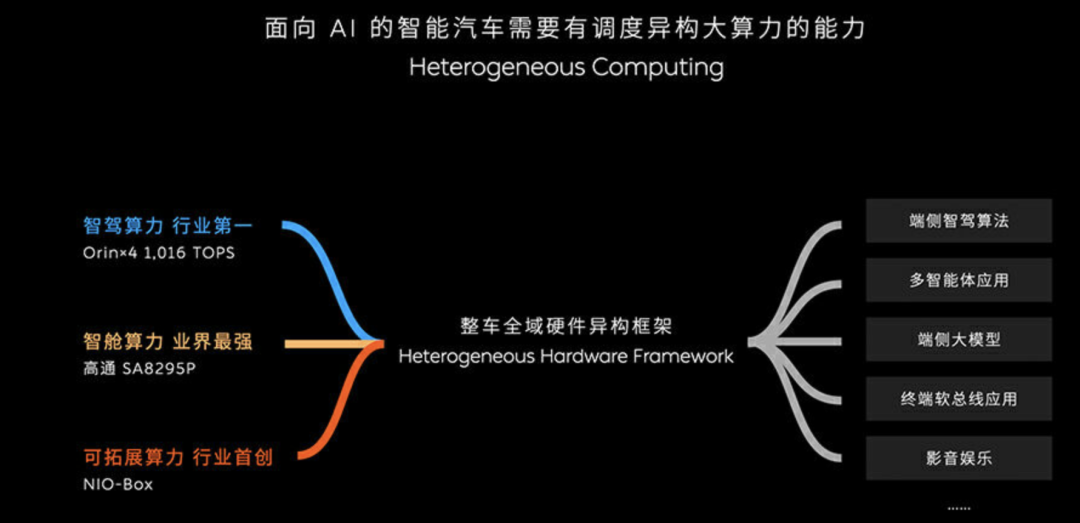
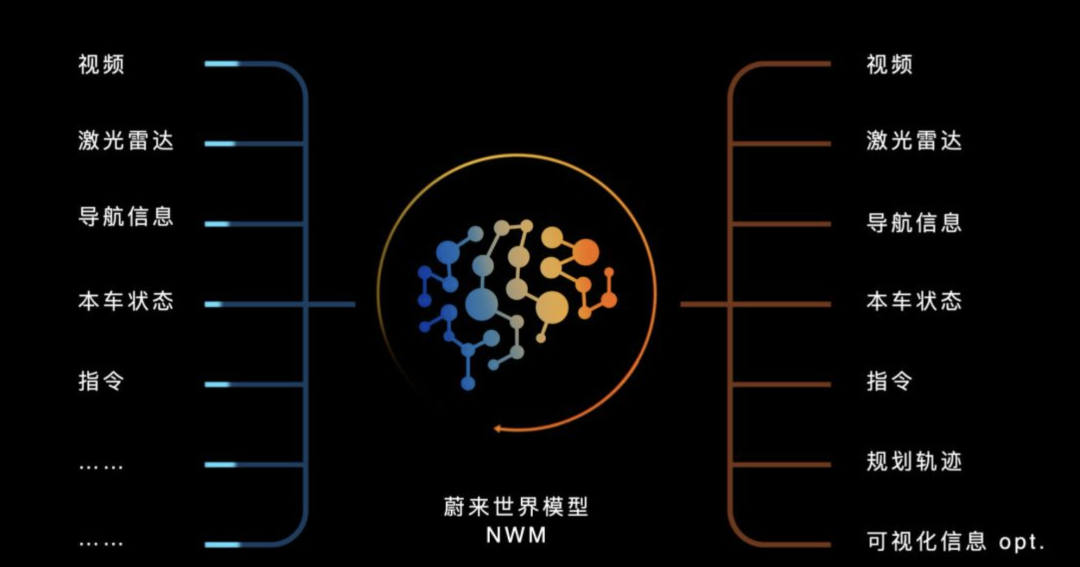
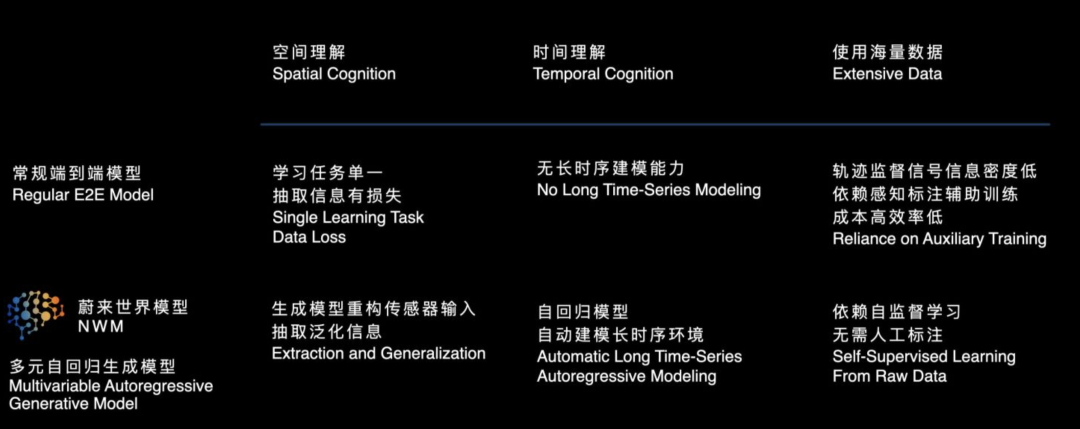
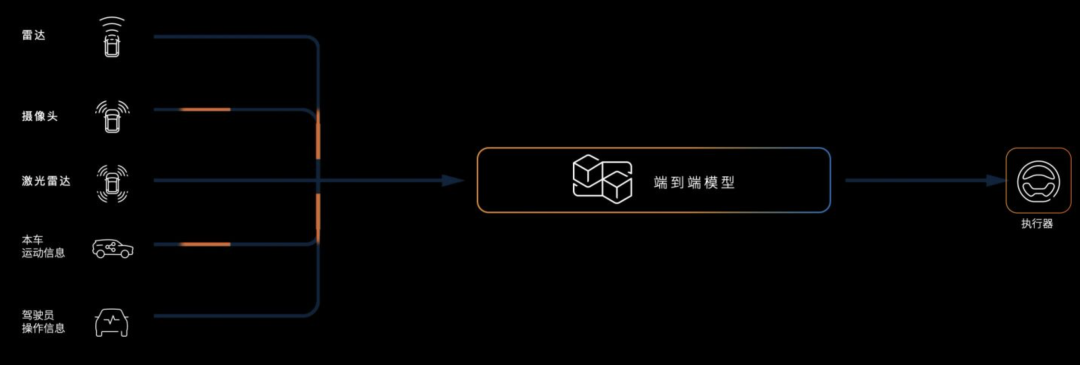
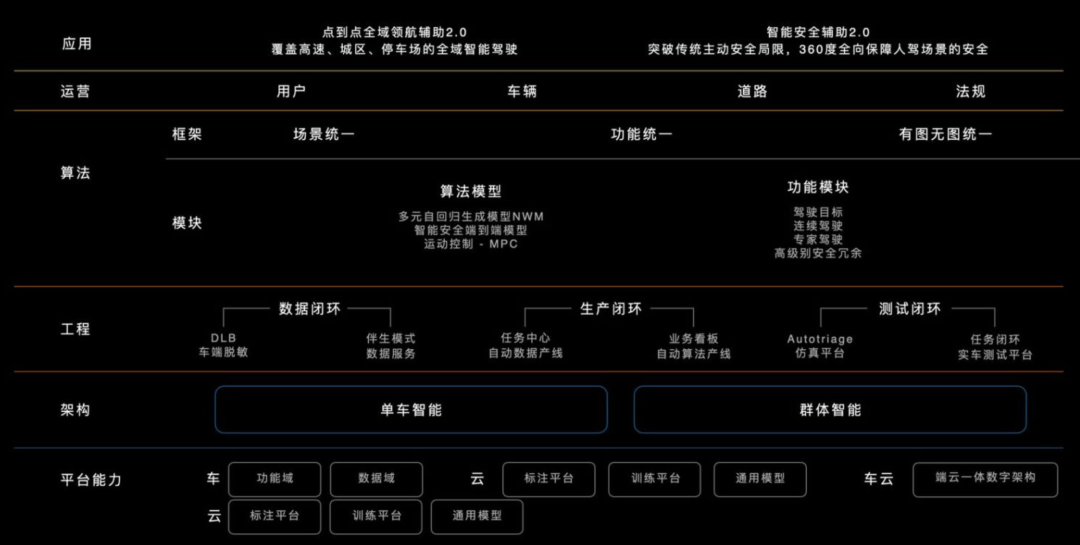
汽车要实现完全的智能化,在设计时就需要从顶层重新定义和思考,需要采用全新的架构和定义方式,实现从顶层到底层的打通,消除各域的界限,构建整车全域智能体系。为了实现这一目标,必须拥有一个能够在不同设备(汽车、手机、手表)上运行的整车全域操作系统,这样才能统一管理、控制、协调硬件资源,最大限度发挥硬件潜能。SkyOS·天枢是中国首个整车全域操作系统,构建了“1+4+N”的技术集群,涵盖智能驾驶、车控、车联、数字座舱等整车全域。● 1:多场景优化、高性能、高可靠的虚拟机监视器SkyOS-H,用于管理和调度整车的异构大算力资源,为各个系统提供安全隔离的运行环境。● 4:四个操作系统内核。包括轻量、强可靠性、强实时性的SkyOS-L;基于微内核构建的高安全、强可靠性、强实时性的SkyOS-M;面向丰富应用场景高性能、实时性深度优化的SkyOS-R;面向原生智能深度定制的SkyOS-C。● N:多个中间件,包括SOA框架、软件升级、数据闭环、信息安全&功能安全、网络、AI能力集等。高性能、高可靠的虚拟机监视器 SkyOS-H 负责管理和调度整车的异构大算力资源;四个操作系统内核 SkyOS-L、SkyOS-M、SkyOS-R、SkyOS-C 分别针对不同需求进行优化;多个中间件则包括 SOA 框架、软件升级、数据闭环等,实现了底层硬件与上层应用的无缝连接。简单来说,SkyOS-L是首个实现AutoSAR国产替代并规模化商用的实时操作系统,并能提供比AutoSAR更强大的功能,这个实现就很不容易了。SkyOS-M是全球首个基于sel4微内核架构的商用量产双安全实时系统,也是世界上第一个被认为通过形式化验证确认没有bug的操作系统内核,安全性远高于ASIL-D。今天给给人印象最深刻的是基于NOMI的全新架构——NOMI GPT。这一架构融合了先进的AI大模型能力和原生智能系统,定义了面向大模型的车载AI交互模式。NOMI GPT架构让NOMI进化为交互效率最高、信息传递效率最优的车载人工智能助手。NOMI Agents 多智能体框架使得 NOMI 能够自主理解、规划决策,并调用工具执行复杂任务。例如,它可以学会使用不同的工具,如调用搜索、导航和预约服务,根据任务的复杂性和时间跨度进行复杂的规划和编排,并建立与任务相关的短时和长时记忆。这种能力使得 NOMI 在处理各种场景时更加智能和高效。NOMI GPT 基于自研情境智能算法和技术架构,可以感知包括人、车、环境、服务等上千种原子信息,并通过情境计算以及融合仲裁,输出语义化的情境描述,让 NOMI 的行动和表现恰如其分。专属智能则通过全栈自研的算法和架构,将用户与 NOMI 的互动进行筛选、推理、计算和沉淀,转化为千人千面的专属记忆。同时,严格的数据规范和隐私保护措施,确保了用户个人信息的安全。情感表达模块能够根据情境智能和专属智能的输入,让 NOMI 组合出恰如其分的多模态表达,实现响应速度与表达效果之间的最佳平衡。在个性化服务和生态方面,以车为中心打造的开放平台,为用户带来了丰富、优质、原生和无缝的极致体验。建立在 SkyCore 开放平台的基础上,采用基于 SOA 架构的原子化能力设计,将账号等应用基础服务、NOMI 交互等座舱能力协同、座椅、氛围灯等车控协同能力以及设备互联能力以原子能力方式开放给开发者。目前,已经向三方应用伙伴开放了 260+车端跨域的原子能力 API。Flux-轻应用平台的推出,让车载应用商店缺少的原生应用可以基于 Web 生成 Flux-轻应用,获得接近原生体验的高品质内容和服务。微信小程序的接入,将用户日常手机上使用的小程序体验和服务全面接入车机,并且与车机融合获得更原生的体验。蔚来世界模型NWM,这是一个多元自回归生成式的具身驾驶模型,可全量理解数据、具有长时序推演和决策能力,能在100毫秒内推演出216种可能发生的场景,找到最优路径。作为生成式模型,NWM可将3秒钟的驾驶视频作为Prompt(提示词),生成长达120秒的视频。NWM还具备与生俱来的闭环仿真测试能力。在一系列极具挑战性的道路环境中,NWM全面测试并验证了其卓越的性能表现,涵盖了施工区域、恶劣天气条件以及交通参与者之间的复杂交互场景。NADArch2.0在算法层升级为引入世界模型的端到端架构,直接从原始传感器数据生成驾驶决策,减少传统方案中的信息损耗,且预测能力更强,让智能驾驶体验更拟人化。在模型训练层面,NADArch2.0架构还可充分利用群体智能的数据闭环和生成式仿真数据,通过海量数据驱动智驾模型进行快速迭代。基于NADArch2.0架构,全域领航辅助NOP+和智能安全同步升级为2.0版本,为用户带来更轻松、更安全的智能驾驶体验。NOP+2.0将于2024年下半年上车,智能安全2.0已逐步交付,增强版AEB于Banyan 2.6.5上车。● 解决数据覆盖问题和长尾场景:利用上亿的数据片段,覆盖常见及长尾场景。● 自监督学习,实现高信息密度感知标注辅助训练:通过传感器数据重建,减少对人工标注的依赖,实现数据快速扩展。有监督模型只学习人工标注的信息,这会带来信息损失问题,因为人工标注的两大问题:标注精度不准,标注定义不全。自监督世界模型可以免去人工标注,模仿人类学习方式,来达到拟人效果。● 增强信息抽取能力:生成式的模型,可以全量信息提取,增强模型的通用性和泛化能力。● 长时序推演和决策:采用自回归形式,模拟时间维度信息,提升智能驾驶的连续性和类人性处理能力。蔚来提出了一个多元自回归生成式的智能驾驶模型,NIO WorldModel,拥有世界模型的特性。加入世界模型的端到端,解决了什么问题?在NADArch2.0架构中,蔚来将智能驾驶的算法层升级为引入世界模型的端到端架构,直接从原始传感器数据生成驾驶决策,减少传统方案中的信息损耗,且预测能力更强,让智能驾驶体验更拟人。相比端到端的架构,引入NWM后,模型实现了三点优化:● 生成式无监督的方式,对海量数据的利用更加高效。我们后续将持续跟踪这些技术细节,因为这一领域的发展变化非常迅速。
蔚来在创新科技日上再次展示了其独特的技术特色和核心价值,并将技术作为其发展的核心驱动力,逐步构建起了自身的竞争优势壁垒。