

 main的返回值
main的返回值
main函数的返回值用于说明程序的退出状态。如果返回0,则代表程序正常退出。返回其它数字的含义则由系统决定。通常,返回非零代表程序异常退出。
有一些书上的,都使用了void main( ) ,其实这是错误的。C/C++ 中从来没有定义过void main( ) 。
C++ 之父 Bjarne Stroustrup 在他的主页上的 FAQ 中明确地写着 “The definition void main( ) { /* … */ } is not and never has been C++, nor has it even been C.” 这可能是因为 在 C 和 C++ 中,不接收任何参数也不返回任何信息的函数原型为“void foo(void);”。
可能正是因为这个,所以很多人都误认为如果不需要程序返回值时可以把main函数定义成void main(void) 。然而这是错误的!main 函数的返回值应该定义为 int 类型,C 和 C++ 标准中都是这样规定的。
虽然在一些编译器中,void main() 可以通过编译,但并非所有编译器都支持 void main() ,因为标准中从来没有定义过 void main 。
g++3.2 中如果 main 函数的返回值不是 int 类型,就根本通不过编译。而 gcc3.2 则会发出警告。所以,为了程序拥有很好的可移植性,一定要用 int main ()。测试如下:
#include <stdio.h>
void main()
{
printf("Hello world\n");
return;
}
运行结果:g++ test.c

那既然main函数只有一种返回值类型,那么是不是可以不写?规定:不明确标明返回值的,默认返回值为int,也就是说 main()等同于int main(),而不是等同于void main()。
在C99中,标准要求编译器至少给 main() 这种用法来个警告,而在c89中这种写法是被允许的。但为了程序的规范性和可读性,还是应该明确的指出返回值的类型。测试代码:
#include <stdio.h>
main()
{
printf("Hello world\n");
return 0;
}
运行结果:

在 C99 标准中,只有以下两种定义方式是正确的:
int main( void )
int main( int argc, char *argv[] )
若不需要从命令行中获取参数,就使用int main(void) ;否则的话,就用int main( int argc, char *argv[] )。当然参数的传递还可以有其他的方式,在下一节中,会单独来讲。
main 函数的返回值类型必须是 int ,这样返回值才能传递给程序的调用者(如操作系统),等同于 exit(0),来判断函数的执行结果。
C++89中定义了如下两种 main 函数的定义方式:
int main( )
int main( int argc, char *argv[] )
int main( ) 等同于 C99 中的 int main( void ) ;int main( int argc, char*argv[] ) 的用法也和C99 中定义的一样。同样,main函数的返回值类型也必须是int。
如果 main 函数的最后没有写 return 语句的话,C99 和c++89都规定编译器要自动在生成的目标文件中加入return 0,表示程序正常退出。
不过,建议你最好在main函数的最后加上return语句,虽然没有这个必要,但这是一个好的习惯。在linux下我们可以使用shell命令:echo $? 查看函数的返回值。
#include <stdio.h>
int main()
{
printf("Hello world\n");
}
运行结果:
同时,需要说明的是return的返回值会进行 类型转换,比如:若return 1.2 ;会将其强制转换为1,即真正的返回值是1,同理,return ‘a’ ;的话,真正的返回值就是97,;但是若return “abc”;便会报警告,因为无法进行隐式类型转换。
前文说到,main函数如果返回0,则代表程序正常退出。通常,返回非零代表程序异常退出。在本文的最后,测试一下: test.c:
#include <stdio.h>
int main()
{
printf("c 语言\n");
return 11.1;
}
在终端执行如下:
testSigpipe git:(master) vim test.c
testSigpipe git:(master) gcc test.c
testSigpipe git:(master) ./a.out && echo "hello world" #&&与运算,前面为真,才会执行后边的
c 语言
可以看出,操作系统认为main函数执行失败,因为main函数的返回值是11
testSigpipe git:(master) ./a.out
testSigpipe git:(master) echo $?
11
若将main函数中返回值该为0的话:
testSigpipe git:(master) vim test.c
testSigpipe git:(master) gcc test.c
testSigpipe git:(master) ./a.out && echo "hello world" #hello
c 语言
hello world
可以看出,正如我们所期望的一样,main函数返回0,代表函数正常退出,执行成功;返回非0,代表函数出先异常,执行失败。
首先说明的是,可能有些人认为main函数是不可传入参数的,但是实际上这是错误的。main函数可以从命令行获取参数,从而提高代码的复用性。
为main函数传参时,可选的main函数原形为:
int main(int argc , char* argv[],char* envp[]);
参数说明:
①、第一个参数argc表示的是传入参数的个数 。
②、第二个参数char* argv[],是字符串数组,用来存放指向的字符串参数的指针数组,每一个元素指向一个参数。各成员含义如下:
argv[0]:指向程序运行的全路径名。
argv[1]:指向执行程序名后的第一个字符串 ,表示真正传入的第一个参数。
argv[2]:指向执行程序名后的第二个字符串 ,表示传入的第二个参数。
…… argv[n]:指向执行程序名后的第n个字符串 ,表示传入的第n个参数。
规定:argv[argc]为NULL ,表示参数的结尾。
③、第三个参数char* envp[],也是一个字符串数组,主要是保存这用户环境中的变量字符串,以NULL结束。envp[]的每一个元素都包含ENVVAR=value形式的字符串,其中ENVVAR为环境变量,value为其对应的值。
envp一旦传入,它就只是单纯的字符串数组而已,不会随着程序动态设置发生改变。可以使用putenv函数实时修改环境变量,也能使用getenv实时查看环境变量,但是envp本身不会发生改变;平时使用到的比较少。
注意:main函数的参数char* argv[]和char* envp[]表示的是字符串数组,书写形式不止char* argv[]这一种,相应的argv[][]和 char** argv均可。
写个小测试程序,测试main函数的第三个参数:
#include <stdio.h>
int main(int argc ,char* argv[] ,char* envp[])
{
int i = 0;
while(envp[i++])
{
printf("%s\n", envp[i]);
}
return 0;
}
运行结果:部分截图
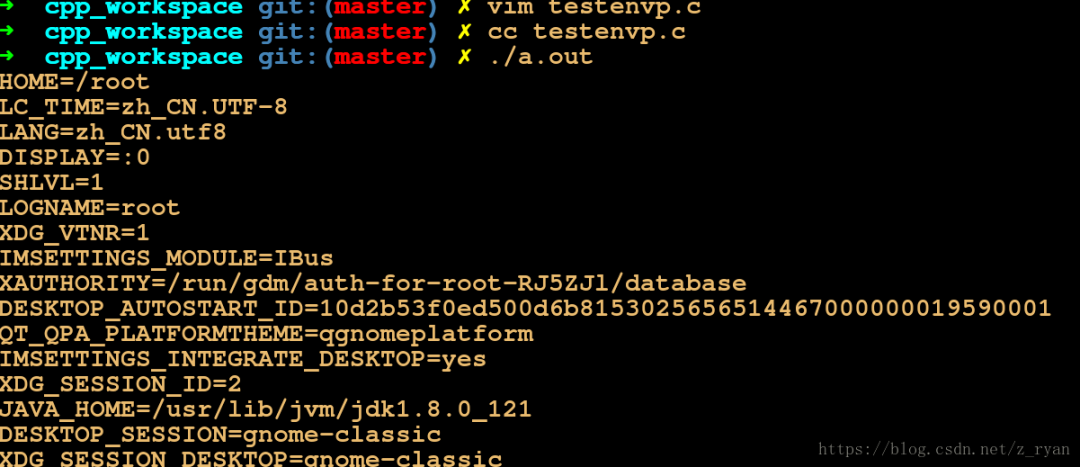
envp[] 获得的信息等同于Linux下env命令的结果。
在使用main函数的带参版本的时,最常用的就是:**int main(int argc , char* argv[]);**变量名称argc和argv是常规的名称,当然也可以换成其他名称。
命令行执行的形式为:可执行文件名 参数1 参数2 … … 参数n。可执行文件名称和参数、参数之间均使用空格隔开。
#include <stdio.h>
int main(int argc, char* argv[])
{
int i;
printf("Total %d arguments\n",argc);
for(i = 0; i < argc; i++)
{
printf("\nArgument argv[%d] = %s \n",i, argv[i]);
}
return 0;
}
运行结果:
cpp_workspace git:(master) vim testmain.c
cpp_workspace git:(master) gcc testmain.c
cpp_workspace git:(master) ./a.out 1 2 3 #./a.out为程序名 1为第一个参数 , 2 为第二个参数, 3 为第三个参数
Total 4 arguments
Argument argv[0] = ./a.out
Argument argv[1] = 1
Argument argv[2] = 2
Argument argv[3] = 3
Argument argv[4] = (null) #默认argv[argc]为null
可能有的人会说,这还用说,main函数肯定是程序执行的第一个函数。那么,事实果然如此吗?相信在看了本节之后,会有不一样的认识。
linux系统下程序的入口是”_start”,这个函数是linux系统库(Glibc)的一部分,当我们的程序和Glibc链接在一起形成最终的可执行文件的之后,这个函数就是程序执行初始化的入口函数。通过一个测试程序来说明:
#include <stdio.h>
int main()
{
printf("Hello world\n");
return 0;
}
编译:
gcc testmain.c -nostdlib # -nostdlib (不链接标准库)
程序执行会引发错误:/usr/bin/ld: warning: cannot find entry symbol _start; 未找到这个符号
所以说:
那么,这个_start和main函数有什么关系呢?下面我们来进行进一步探究。
_start函数的实现该入口是由ld链接器默认的链接脚本指定的,当然用户也可以通过参数进行设定。_start由汇编代码实现。大致用如下伪代码表示:
void _start()
{
%ebp = 0;
int argc = pop from stack
char ** argv = top of stack;
__libc_start_main(main, argc, argv, __libc_csu_init, __linc_csu_fini,
edx, top of stack);
}
对应的汇编代码如下:
_start:
xor ebp, ebp //清空ebp
pop esi //保存argc,esi = argc
mov esp, ecx //保存argv, ecx = argv
push esp //参数7保存当前栈顶
push edx //参数6
push __libc_csu_fini//参数5
push __libc_csu_init//参数4
push ecx //参数3
push esi //参数2
push main//参数1
call _libc_start_main
hlt
可以看出,在调用_start之前,装载器就会将用户的参数和环境变量压入栈中。
从_start的实现可以看出,main函数执行之前还要做一系列的工作。主要就是初始化系统相关资源:
Some of the stuff that has to happen before main():
set up initial stack pointer
initialize static and global data
zero out uninitialized data
run global constructors
Some of this comes with the runtime library's crt0.o file or its __start() function. Some of it you need to do yourself.
Crt0 is a synonym for the C runtime library.
1.设置栈指针
2.初始化static静态和global全局变量,即data段的内容
3.将未初始化部分的赋初值:数值型short,int,long等为0,bool为FALSE,指针为NULL,等等,即.bss段的内容
4.运行全局构造器,类似c++中全局构造函数
5.将main函数的参数,argc,argv等传递给main函数,然后才真正运行main函数
下面,我们就来说说在mian函数执行之前到底会运行哪些代码:(1)全局对象的构造函数会在main 函数之前执行。
(2)一些全局变量、对象和静态变量、对象的空间分配和赋初值就是在执行main函数之前,而main函数执行完后,还要去执行一些诸如释放空间、释放资源使用权等操作
(3)进程启动后,要执行一些初始化代码(如设置环境变量等),然后跳转到main执行。全局对象的构造也在main之前。
(4)通过关键字attribute,让一个函数在主函数之前运行,进行一些数据初始化、模块加载验证等。
①、通过关键字attribute
#include <stdio.h>
__attribute__((constructor)) void before_main_to_run()
{
printf("Hi~,i am called before the main function!\n");
printf("%s\n",__FUNCTION__);
}
__attribute__((destructor)) void after_main_to_run()
{
printf("%s\n",__FUNCTION__);
printf("Hi~,i am called after the main function!\n");
}
int main( int argc, char ** argv )
{
printf("i am main function, and i can get my name(%s) by this way.\n",__FUNCTION__);
return 0;
}
②、全局变量的初始化
#include <iostream>
using namespace std;
inline int startup_1()
{
cout<<"startup_1 run"<<endl;
return 0;
}
int static no_use_variable_startup_1 = startup_1();
int main(int argc, const char * argv[])
{
cout<<"this is main"<<endl;
return 0;
}
至此,我们就聊完了main函数执行之前的事情,那么,你是否还以为main函数也是程序运行的最后一个函数呢?
结果当然不是,在main函数运行之后还有其他函数可以执行,main函数执行完毕之后,返回到入口函数,入口函数进行清理工作,包括全局变量析构、堆销毁、关闭I/O等,然后进行系统调用结束进程。
1、全局对象的析构函数会在main函数之后执行; 2、用atexit注册的函数也会在main之后执行。
原形:
int atexit(void (*func)(void));
atexit 函数可以“注册”一个函数,使这个函数将在main函数正常终止时被调用,当程序异常终止时,通过它注册的函数并不会被调用。
编译器必须至少允许程序员注册32个函数。如果注册成功,atexit 返回0,否则返回非零值,没有办法取消一个函数的注册。
在 exit 所执行的任何标准清理操作之前,被注册的函数按照与注册顺序相反的顺序被依次调用。每个被调用的函数不接受任何参数,并且返回类型是 void。被注册的函数不应该试图引用任何存储类别为 auto 或 register 的对象(例如通过指针),除非是它自己所定义的。
多次注册同一个函数将导致这个函数被多次调用。函数调用的最后的操作就是出栈过程。main()同样也是一个函数,在结束时,按出栈的顺序调用使用atexit函数注册的,所以说,函数atexit是注册的函数和函数入栈出栈一样,是先进后出的,先注册的后执行。通过atexit可以注册回调清理函数。可以在这些函数中加入一些清理工作,比如内存释放、关闭打开的文件、关闭socket描述符、释放锁等等。
#include<stdio.h>
#include<stdlib.h>
void fn0( void ), fn1( void ), fn2( void ), fn3( void ), fn4( void );
int main( void )
{
//注意使用atexit注册的函数的执行顺序:先注册的后执行
atexit( fn0 );
atexit( fn1 );
atexit( fn2 );
atexit( fn3 );
atexit( fn4 );
printf( "This is executed first.\n" );
printf("main will quit now!\n");
return 0;
}
void fn0()
{
printf( "first register ,last call\n" );
}
void fn1(
{
printf( "next.\n" );
}
void fn2()
{
printf( "executed " );
}
void fn3()
{
printf( "is " );
}
void fn4()
{
printf( "This " );
}
作者:z_ryan
原文:https://blog.csdn.net/z_ryan/category_7316855.html

1.看明白了CAN的错帧漏检,车厂就不能敷衍你了!
2.Gartner发布2021年重要战略科技趋势!
3.设计电路时,哪些蠢哭我们青春的事...
4.Linux x86 和ARM什么区别?
5.探讨STM32启动文件中的几个问题~
6.在生产中使用Rust的著名公司及他们选择的理由!

免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。
