
1.1
1.2
宝马车载以太网搭载

未来智能网联汽车
2.1
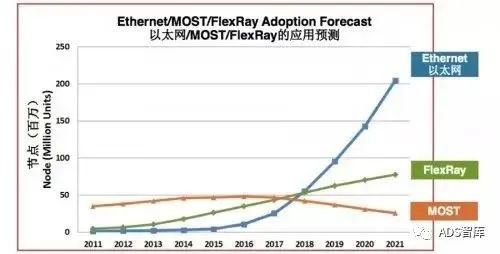
新的汽车功能,如自动泊车系统、车道偏离检测系统、盲点检测和高级信息娱乐系统等引发了对新的数据总线需求。显然未来我们需要的是更加开放、高速,且易于与其他电子系统或者设备集成的车载网络,同时有助于减少功耗,线束重量和部署成本。
2015年CES发布的下一代BroadR-Reach 车载以太网芯片
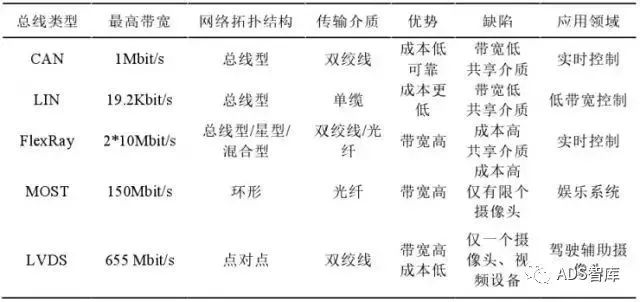
传统车载网络支持的通信协议较为单一,而车载以太网可以同时支持AVB、TCP/IP、DOIP、SONIP等多种协议或应用形式。其中,Ethernet AVB 是对传统以太网功能的扩展,通过增加精确时钟同步、带宽预留等协议增强传统以太网音视频传输的实时性,是极具发展潜力的网络音视频实时传输技术。SOME/IP(Scalable Service-Oriented MiddlewarE on IP)则规定了车载摄像头应用的视频通信接口要求,可应用于车载摄像头领域,并通过API实现驾驶辅助摄像头的模式控制。
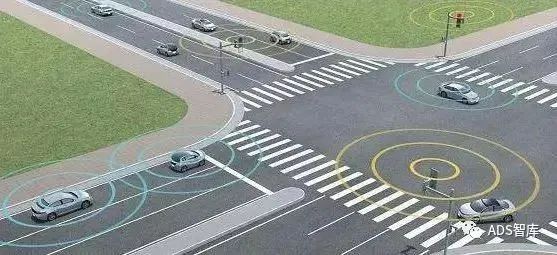
多年来,最能体现以太网是如何适应新需求的、发掘新潜力的事例之一就是当前非常流行的无线网络wifi的引入。类似于Broadcom公司的BroadR-Reach,WiFi也有专供汽车使用的变体,“汽车环境无线存取”WAVE;2010年发布的IEEE802.11p通信规范对WAVE进行了定义,后被写入IEEE802.11-2012主标准中。车载以太网的普及无疑将成为WAVE引入汽车最佳催化剂,而在智能交通时代,WAVE也将为V2X提供新的想象空间。
V2X通讯场景
2.2
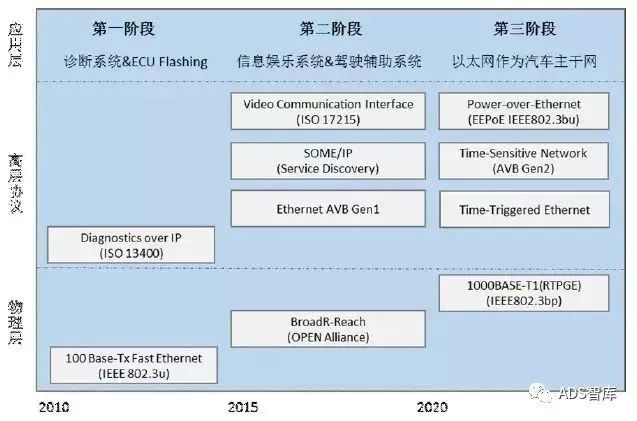
车载以太网技术发展路线
以太网作为一种新型车载网络的进入汽车网络,肯定是无法一蹴而就,在短期内是无法取代现有的车载网络,因此以太网在进入汽车网络时考虑分阶段、从子系统开始逐步深入,并最终统筹汽车网络的演进过程。现今可预期的车载以太网的发展主要可分为三个阶段:
第一阶段(已经有实用案例),基于DoIP标准的车载诊断系统(OBD)和ECU软件刷新。以ECU软件刷新为例,和原有的CAN(1M/S)相比,刷新时间将缩短为原来的百分之一,该应用将大大提升诊断和刷新效率,节省时间、生产及服务成本。
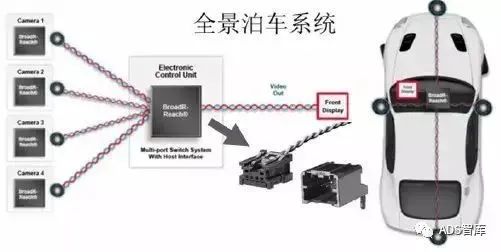
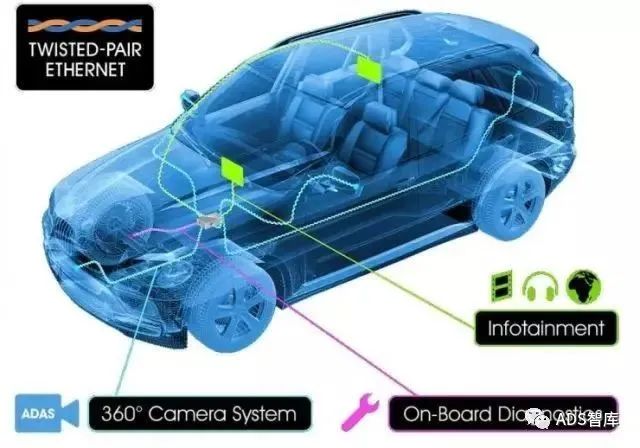
第二阶段车载以太网在信息娱乐系统和驾驶员辅助系统的使用,伴随着BroadR-Reach技术的日益成熟和标准化的不断推进,基于AVB,SOME/IP等技术将逐步推广使用,车载以太网将以单节点或多个节点的形式进行搭载,如使用高分辨率的IP摄像头的全景泊车等驾驶辅助系统,多屏互动的高清信息娱乐系统等进入人们的视野。
2.3

车载以太网标准化组织
基于域控制器的混合车载网络
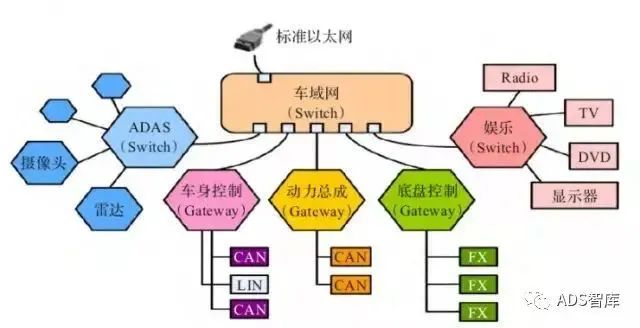
面向域控制器的混合车载网络架构
-END-