


简 介: 本文收录了气垫组举报信的应辩书。竞赛组委会同时还收到了关于车模电调设计原理说明文档以及四份调试视频。材料充分佐证了该气垫组队伍自行设计制作了车模机械结构以及电路板,通过自学,在充分理解设计原理的基础上,经过实际调试和改版,完成了参赛车模作品的制作,并通过现场比赛获得华南赛区比赛成绩。最后感谢气垫组同学及时做出的应辩说明,并对他们就举报者的责任的谅解表示欣赏。通过这次的举报和应辩,他们也为智能车竞赛的公开、公平、公正的举行做出了自己的努力。
关键词: 智能车竞赛,气垫组,应辩书
看到卓大发出的 《一封枪手车举报信[1] 》贴文后,我们组感到十分震惊与气愤。举报者仅凭片面信息武断指责我们请枪手代为做车甚至调车,这是对我们辛勤工作的亵渎!调车之初,我们确因经验不足,参考了网上前辈的成熟方案,但我们参赛所用车模已经过了我们的大量改良,早已和被举报的2024年3~4月版本大不相同。本文将从车模、电调、软件代码、调试过程四个方面(比举报者指认的更详细)介绍我们的原创工作。
敬请卓大、组委会及各位热爱智能车的朋友们明察,并还我们清白,感谢!至于举报者,权当是看到片面消息一时上头产生了误会,我们就不再继续追究了。辛苦卓大及组委会各位老师了,谢谢!
图1为我们华南赛参赛车模与被举报车模的对比,我们在华南赛中所用车模为逐飞结构+左右370电机方案,与举报者指认的3~4月版本有显著区别。在3月份气垫船调试起步阶段,我们确实采用了闲鱼牢大的车模结构,牢大车模底盘高,下面无刷采用3.5英寸桨叶,且无刷的保护罩具有封闭性,阻挡吸气的感觉,影响进风量和悬浮稳定性,存在自旋的问题。
后来5月底改成逐飞结构,逐飞结构无刷采用3英寸桨叶,罩子空间大,进风量大,底盘低,重心低,稳定性强。图1中左侧黑色结构为被举报的闲鱼牢大车模,右侧白色船模为我们改良的逐飞+左右370电机版本。两者底盘高度对比鲜明,无刷罩也有明显差异。被举报车模早已被弃用。
且我们在逐飞结构上也做了改进:经我们测试,370电机在3s电池11.1V下能拉至6w转,较180电机的4w转有明显优势,故自制了370电机保护罩,装车使用。
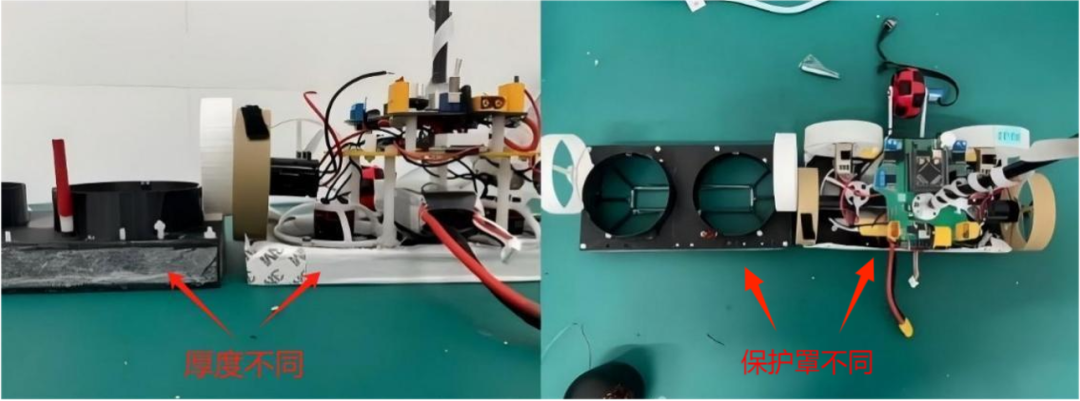
▲ 图1 参赛车模(右侧白色)与被举报车模(左侧黑色)的区别对比图2至图4为我们华南赛车模检查报告表中的照片,其采用逐飞方案+左右370电机,与被举报“枪手车模”完全不同。
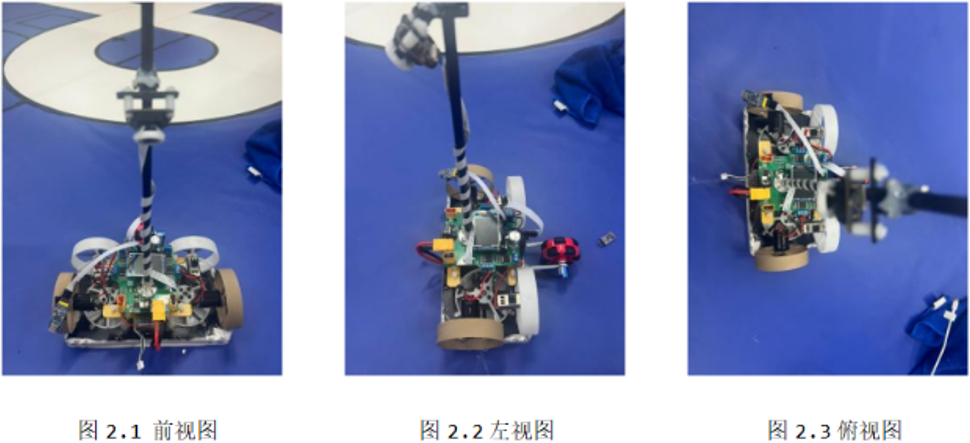
▲ 图2 华南赛车模检查报告部分截图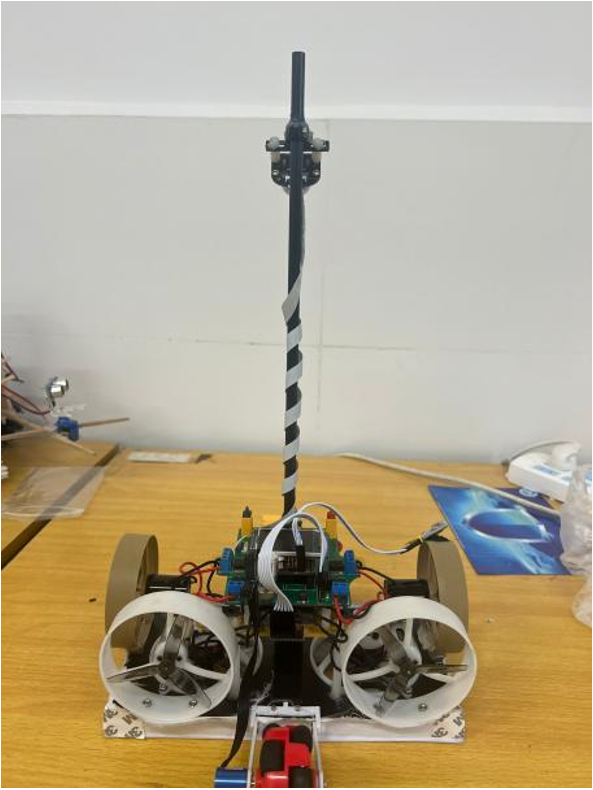
▲ 图3 华南赛参赛车模后视放大图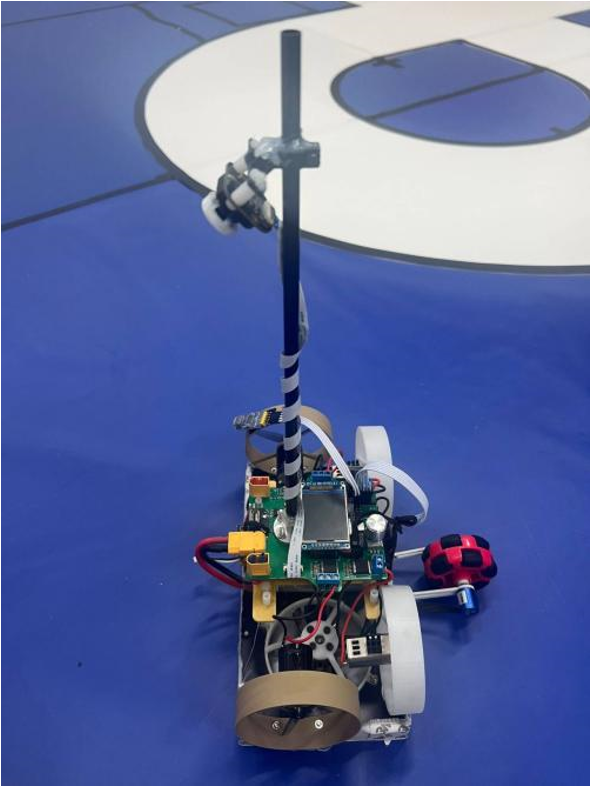
▲ 图4 华南赛参赛车模左视放大图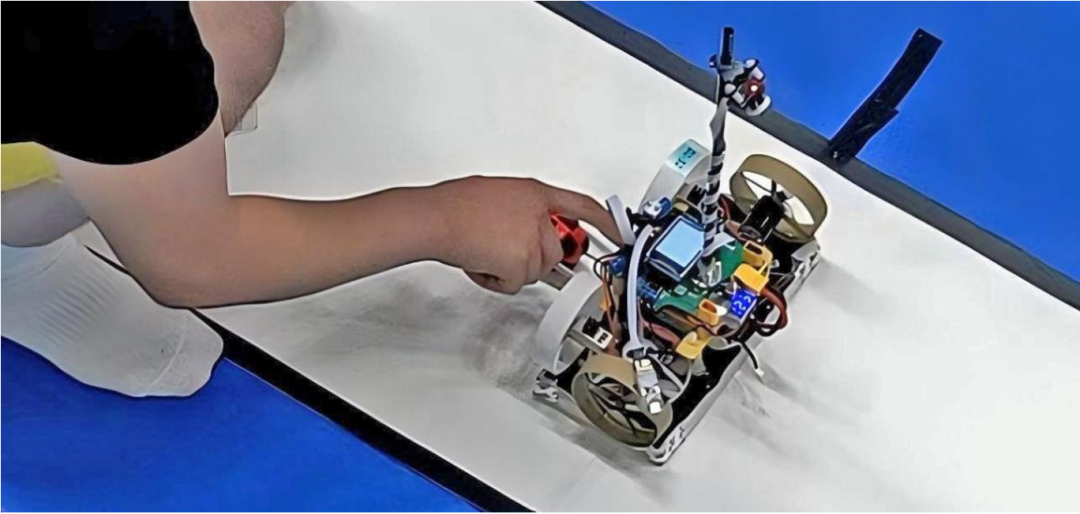
▲ 图5 华南赛预赛视频截图
▲ 图1.1.6 华南省赛预赛视频图5 为附件中我们领队老师所拍“华南赛预赛视频.mp4”的截图,可以看出视频中的比赛车模,与车模检查报告表完全一致,采用逐飞结构+左右370电机方案,与被举报的初期版本完全不同。图6为我们自制370电机保护罩的设计原稿。从图2至图5也能看出我们华南赛参赛车模左右电机为370电机。
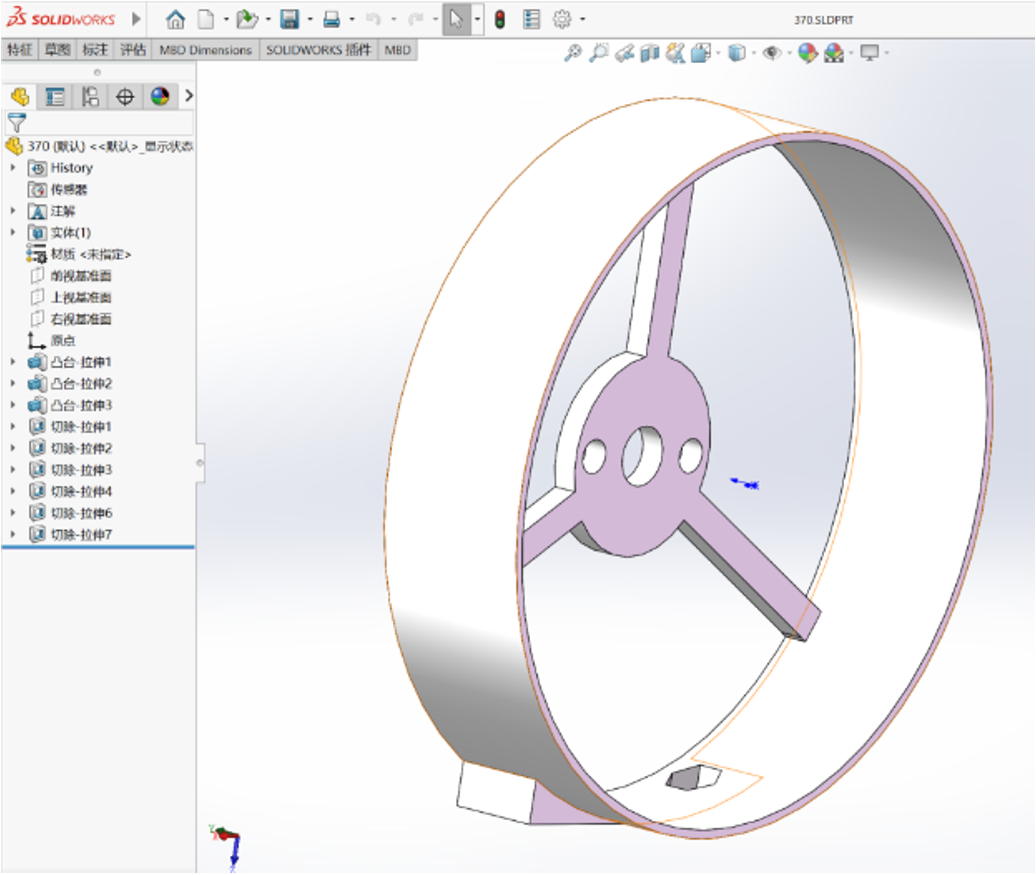
▲ 图6 自制370 电机保护罩设计高事实上我们从没想过坐享其成,期间还测试过全无刷电机方案,如图7所示。附件材料中的“无刷调试视频.mp4”视频亦可互为印证。经过一段时间尝试后我们感觉短时间内难以将全无刷方案调至最佳,故又临时将车模改为无刷+有刷结合方案以备战华南赛。未来不排除继续尝试全无刷方案。

▲ 图7 全无刷方案调试照片以及定位信息
▲ 图1.1.9 无刷电调调试视频
▲ 图1.1.8 初代车模自己调试视频(并非举报者所示的代调)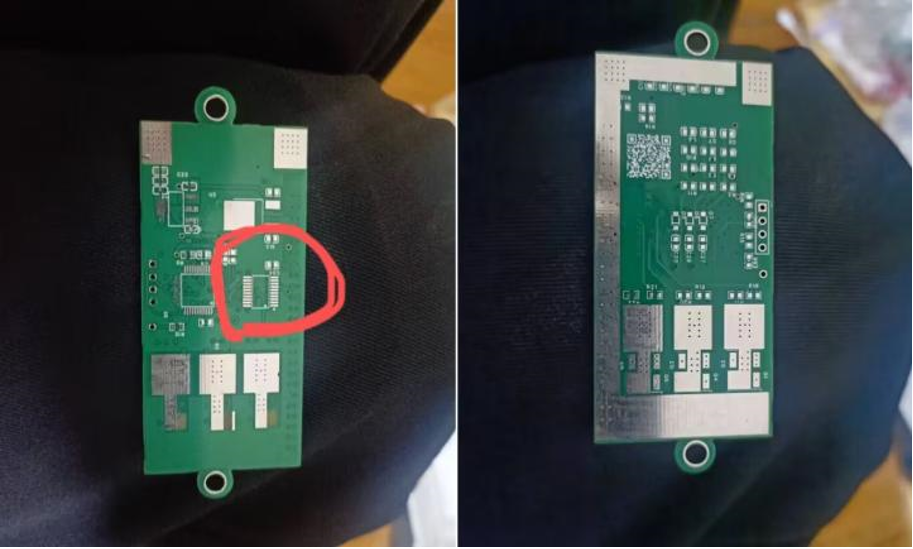
▲ 图8 举报材料中的初期电调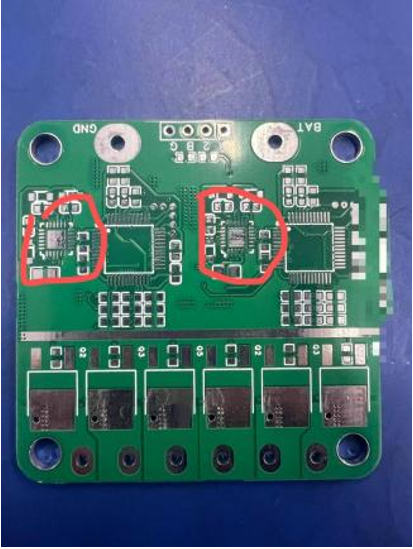
▲ 图9 华南赛参赛车模所使用的电调图8及图9为举报材料中电调与我们华南赛参赛电调的对比:
① 被举报的我队初期电调采用了6288t预驱芯片,而举报材料中闲鱼店方案用了6288q,两者存在显著差异;
② 被举报的初期版本为单电调,而我们参赛版本已改为二合一电调;
③我们在调车过程中发现6288t内阻过大,性能不佳,故后期已改为使用6288q芯片,因而其相比初期版本不仅是简单的合二为一,方案也有调整。
为不过多占用篇幅,我们还撰写了“电调设计原理.docx”一并提交。其详细介绍了我们参赛版本电调的设计,请组委会各位老师核验。
我们所用电路板均为自己设计。图10为部分PCB版的嘉立创下单记录。

▲ 图10 部分 PCB板下单记录我们所用PCB板也为自己亲手焊接。如图11为是我们在焊接电调过程中,判断电调焊接是否成功的测试照。如得到照片中波形即可认为该相调试成功。
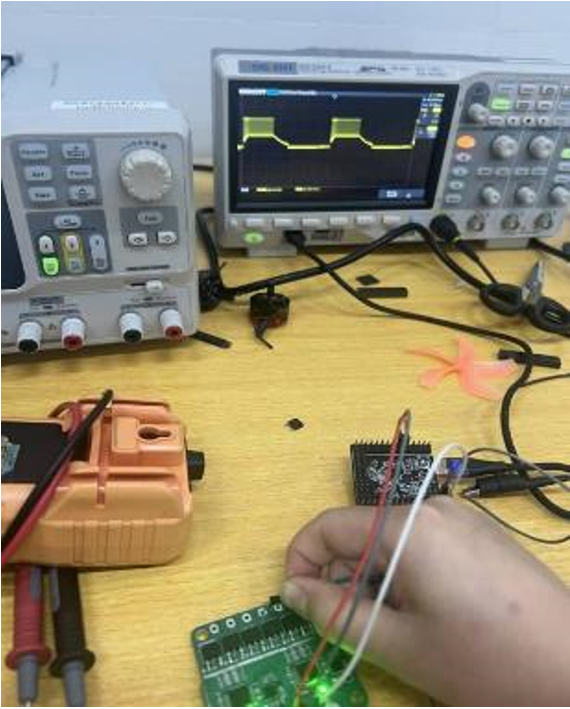
▲ 图11 电调焊接过程中输出测试图12及图13分别为我们调车过程中烧坏的部分电调板及电机的照片。试问如为枪手代做,手上哪来如此多有bug的废品?照片中的废板及电机已封存,随时接受组委会的核验。

▲ 图12 调车过程中烧坏的(部分)电调板
▲ 图13 调车过程中烧坏的(部分)电机
▲ 图1.2.7 有刷电调调试视频图14为我们的无刷启动代码,在硬件调试过程中,如果直接启动无刷电机到一定油门容易堵转或电流过大导致炸电调或电机,故我们采用缓慢启动方案,从而稳定油门。dt_xfu和dt_xfu_2两个参数是元素和速度决策刹车时用的参数,可以有效调节车身姿态。
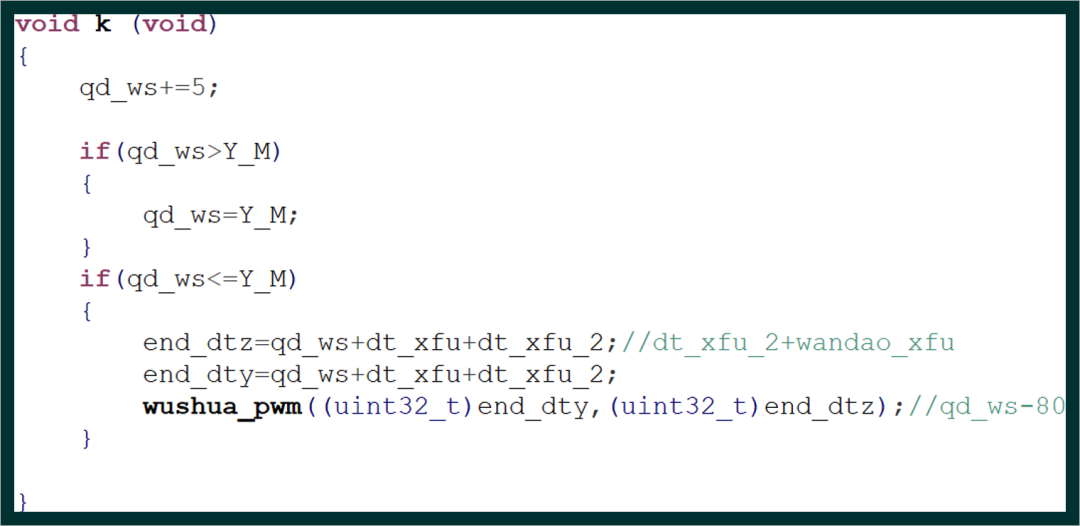
▲ 图14 无刷启动代码图15是我们速度决策的判定代码截图,通过最长白列和元素判定,来改变速度。
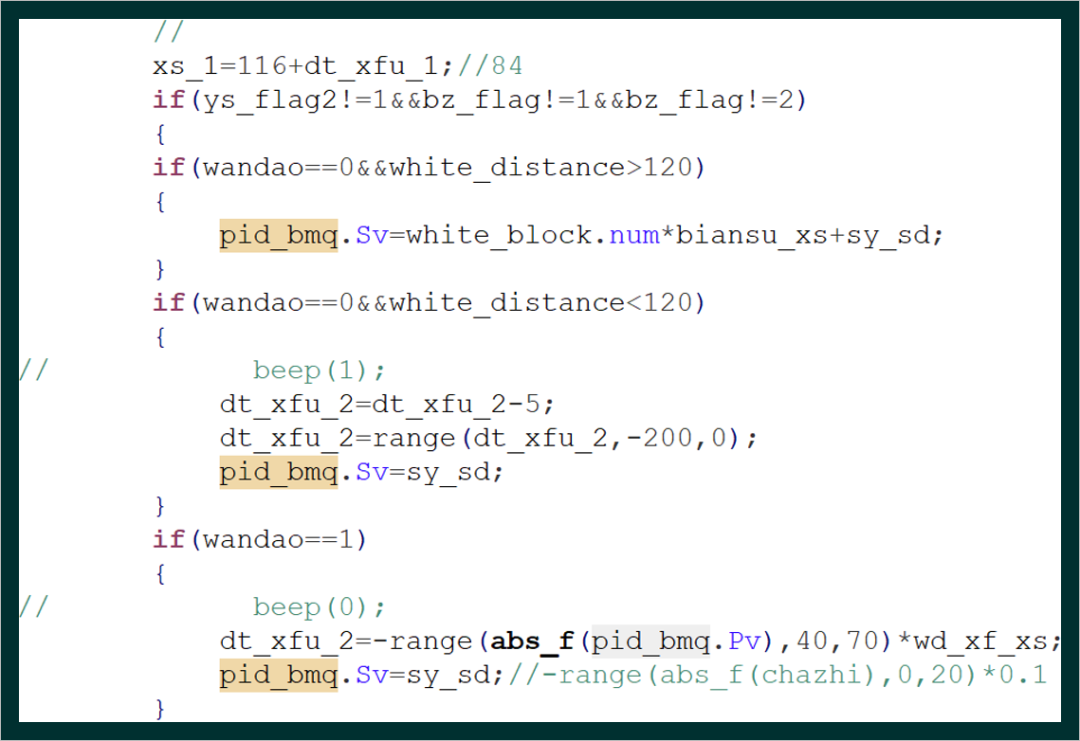
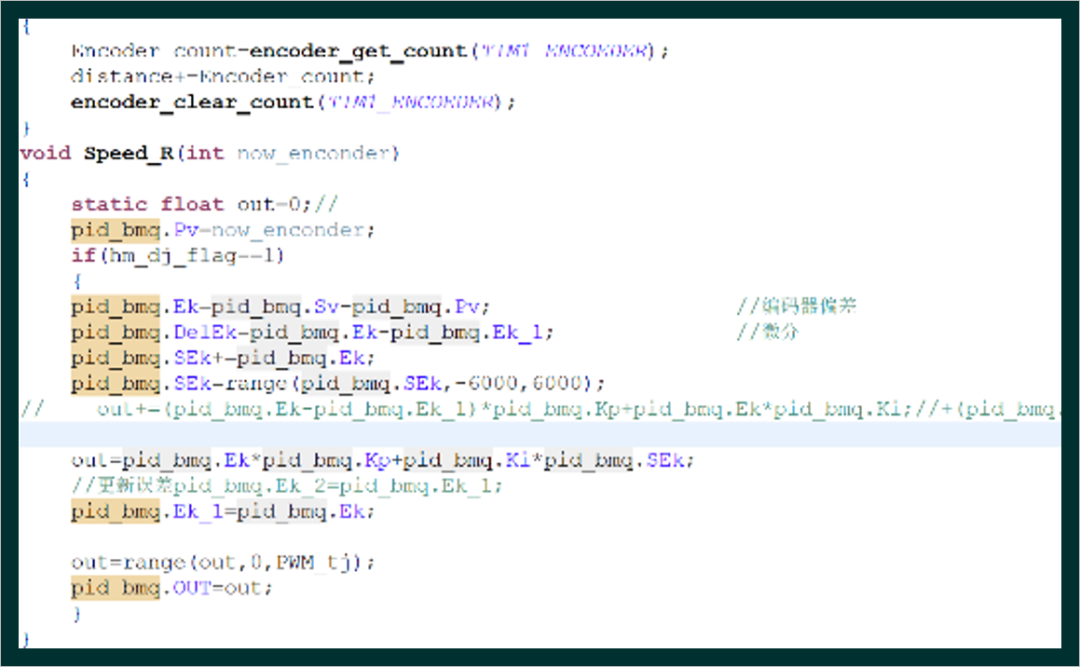
▲ 图15 速度决策的判定代码图16为我们的速度环调试代码。在不断的调试过程中,我们将速度环PID从增量式改成位置式,发现增量式虽然可以保持明显的速度稳定性,但位置式在速度决策中可以直接快速响应,更具有优势,图中被注释掉的即为增量式。
关于其他的控制方式与逐飞给出的控制思路相似,但左右电机控制信号为直接采用后面差速环的外环图像环乘以系数作为输出。
▲ 图16 速度环调试代码我们的车模经过了数次大改,举报者所指认的视频为我们2024年3~4月初次尝试的版本,用该版学习上手后我们即对车模进行了自主改良,华南赛参赛版本早已和被举报版大不相同。图17为相关视频的时间及GPS位置信息,调试时间为4月3日,调试地点为我们学校,不存在任何枪手代打问题。

▲ 图17 初代车模自己调试照片的时间以及定位信息图18为全无刷车模调试视频的时间及定位信息,调试时间为6月8日,调试地点为我们学校。如上所述,经过一段时间尝试后我们感觉短时间内难以将全无刷方案调至最佳。未来不排除继续尝试全无刷方案。

▲ 图18 全无刷车模调试照片的时间以及定位信息图19为华南赛参赛车模调试视频的时间及定位信息,调试时间为7月12日,调试地点为我们学校。该调试车模为华南赛前最后一版车模,为华南赛比赛现场所用车模,与车模检查报告表一致,而与被举报的初代车模大不相同。

▲ 图19 华南赛参赛车模调试视频的时间以及定位信息在满腹委屈与无奈中写下了这份文字,并整理了相关材料,全组的备赛工作也受到了极大影响。对于举报者,权当是看到片面消息一时上头产生了误会,我们就不追究其责任了。只希望卓大及组委会明察秋毫,还我们清白及声誉,拜谢!
在设计电调之初,我们参考了逐飞科技所设计的基于CH32V203的无感无刷驱动开源项目。其电调原理图如图1所示。
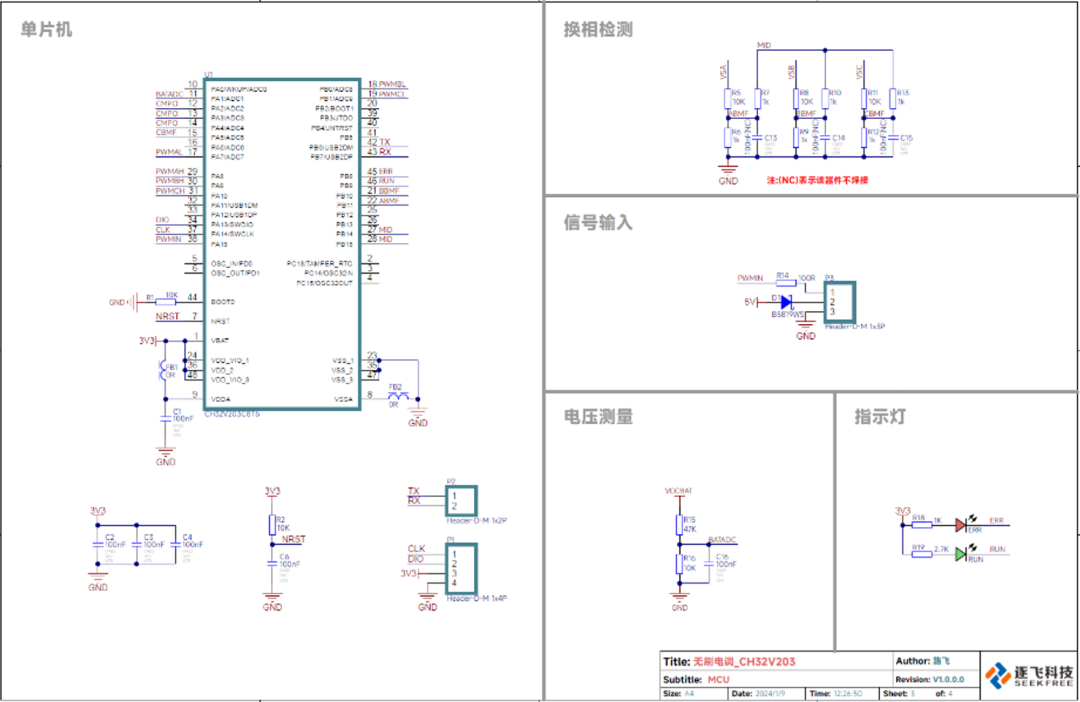
▲ 图2.1.1 逐飞科技电调设计原理图(1)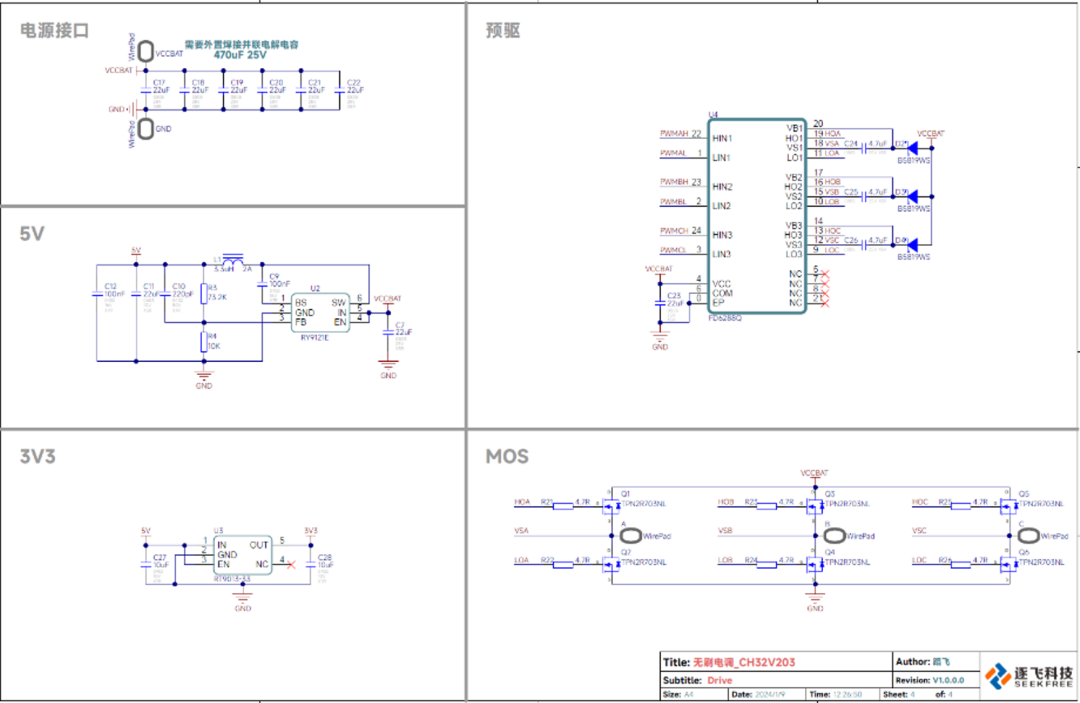
▲ 图2.1.2 逐飞科技电调设计原理图(2)CH32本身内部集成了比较器,故外围电路不需要额外增设比较器电路。逐飞科技也在开源项目中说明了,该项目的电调主要外部器件的选型集中在了预驱与MOS管的型号上。图 2是逐飞选用的MOS数据手册。
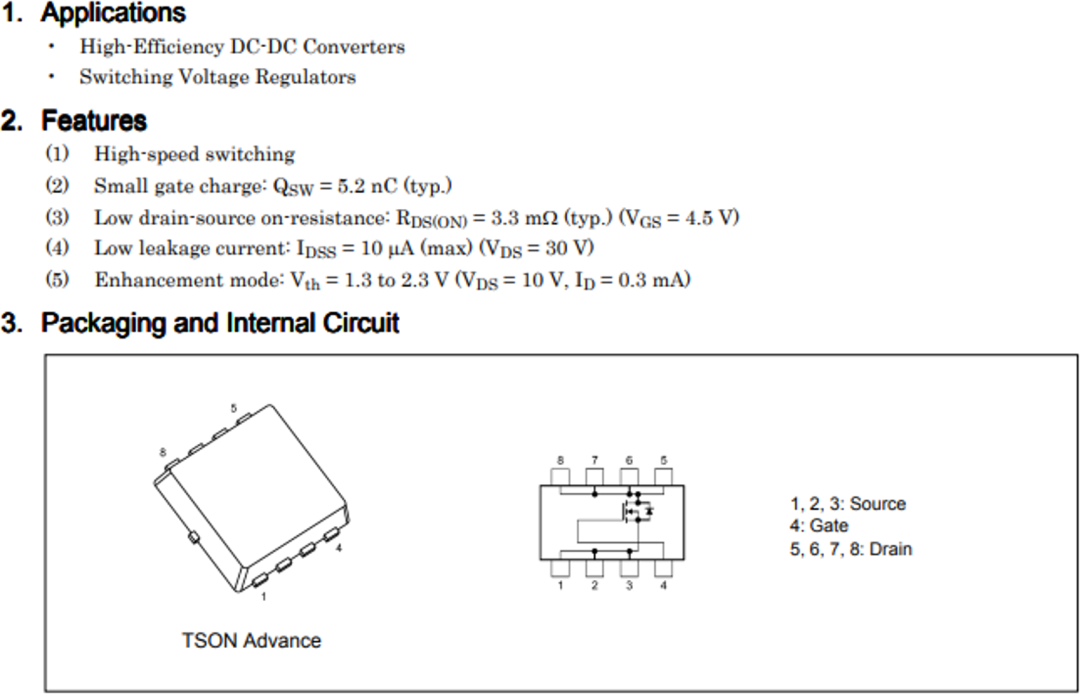
▲ 图2.1.3 逐飞选用的MOS数据手册相较于逐飞科技选择的MOS管型号是TPN2R703NL,这款MOS电流高达45A,10V的时候内阻低至3.3毫欧,开启电压低至2.3V左右,性价比较高。但我们实际在学习过程中发现该MOS虽然内阻低,但体积较小,并不适合我们作为初学者进行复刻使用,因为体积较小,不利于焊接,使用焊锡膏辅助焊接时,可能会存在焊盘连锡的情况,导致MOS短路炸管。
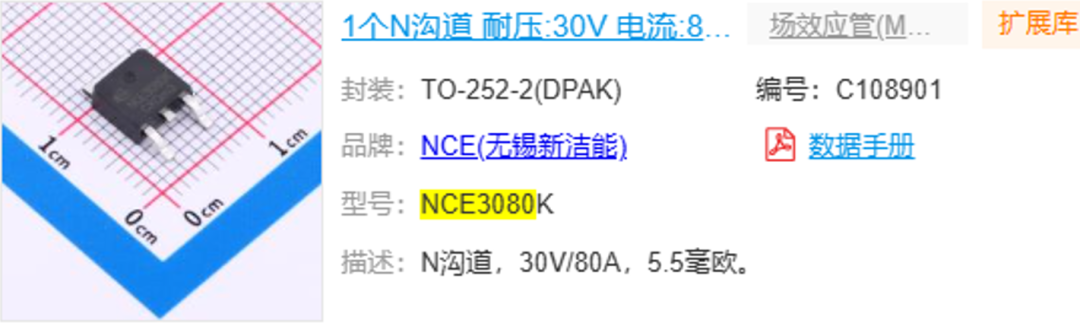
后续我们在逐飞科技的技术群中,了解到了NCE3080K这一NMOS,其在功能上能够完美替代原本的TPN2R703NL,而且其最大的优势便是成本更低更便宜,这使我们有足够的资金去试错。而且该NMOS不仅便宜,而且其耐压范围在0~30V,可稳定工作在80A电流下,MOS的引脚外露,适合我们进行手工焊接。该NMOS在我们使用过程中所发现的缺点则是MOS的内阻偏高相较于前者的3.3毫欧,多出了2.2毫欧,看似差别并不大,但在实际电调工作输出过程中,该MOS明显发热更严重。其参数如图
▲ 图2.1.4 我们选用的MOS 管参数而我们的预驱与逐飞科技一样采用FD6288Q,体积小巧。没有选用另一个封装也是因为试过FD6288T,性能不太好,而且该封装体积大无法缩小电路板体积。
而在供电方面,我们发现逐飞科技所开源的项目,仅支持3S电池既12V环境下工作,对电路进行分析后,我们得出结论:逐飞科技开源的项目电源部分,首先是将12V电源降压至5V,而CH32V203C8T6不具备宽电压输入工作功能,其必须工作在3V3的供电条件下,所以逐飞科技额外增加了5V稳压3V3的电路。我们的供电则选择了78L09作为9V降压芯片,选择9V降压芯片是因为我们希望预驱也可以工作在稳定的电压环境下,保证芯片稳定工作,所以这里选择了78L09,不仅价格便宜,而且性能稳定,功率足够供给板载的芯片稳定工作,且耐温高,这也避免了我们的电调在工作过程中NMOS升温导致电路板升温,进而导致降压芯片工作异常的情况。78L09的参数及在电路板上的位置图如图4所示。
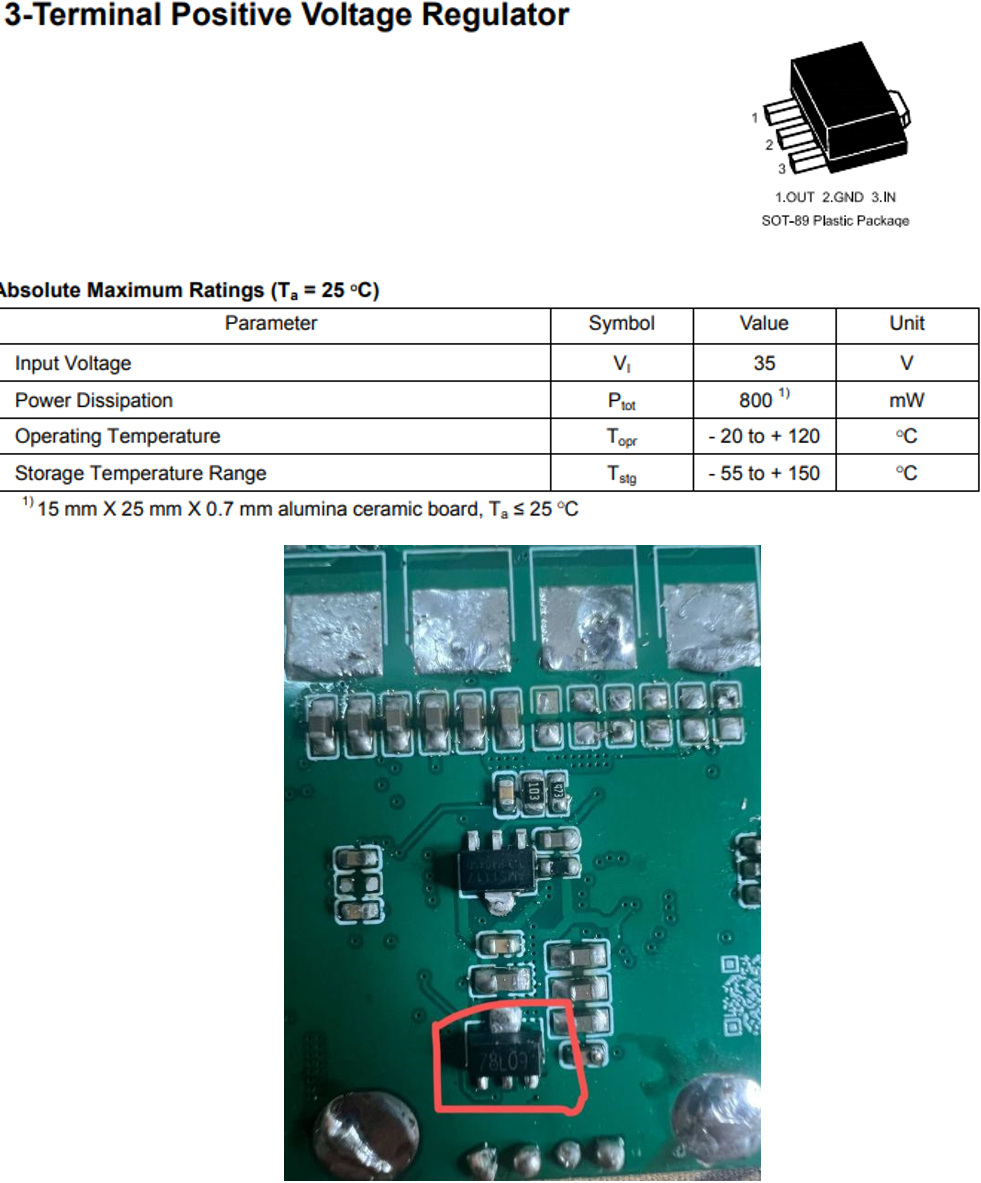
▲ 图2.1.5 78L09的参数以及在电路板上的位置图在78L09将电源降压至9V后,下级稳压则选用了AMS1117,选用该稳压芯片的主要原因是其耐高温,价格便宜且其输出电压的精度在1.5%左右,其具备优良的性能与极度的经济性能,我们所选用的两款稳压模块,都是宽电压输入,SOT89的封装更保证了在不增大元件体积的前提下,保证电源部分的焊接更容易,这样我们整个电路板其实只有预驱芯片与MCU芯片不容易进行焊接。AMS1117数据手册的数据手册如图5所示。

▲ 图2.1.6 AMS1117 数据手册中的相关参数也正因为我们的稳压芯片与NMOS均选用的是耐压范围宽的元件,我们从根本上解决了逐飞科技开源电调工作电压范围小的问题。由此我们的电调支持3~6S电源输入。甚至我们更换NCE3080K为NCE4080K的话,耐压范围更可以提升到30V以上。随后在稳压部分添加电容与0欧电阻,进行滤波与电路板不同GND的隔离,避免干扰。滤波电路如图6所示。
▲ 图2.1.7 滤波电路逐飞科技开源的换相检测部分电路,放置0.1uF的电容,进行滤波,我们在实际设计上发现该行为其实是没有必要的,这也是其描述无需焊接的原因,故我们直接删除了相关的电容元件。
以上解释了我们在原理图上的差异原因与改进优化的理由。接下来介绍我们的元件布局与布线的理由。
首先我们PCB的正面,首层进行了地的分割,没有在全部板的面积上铺设大地,而是在MOS输出部分,即三相电路上进行了分离,此举是避免我们的板子在使用过程中存在磨损导致三相对地短路的情况。而且其实电调的主要过流是经过NMOS输出。如何增强过流能力,则变为我们的主要设计目标。
▲ 图2.1.8 MOS输出的PCB正面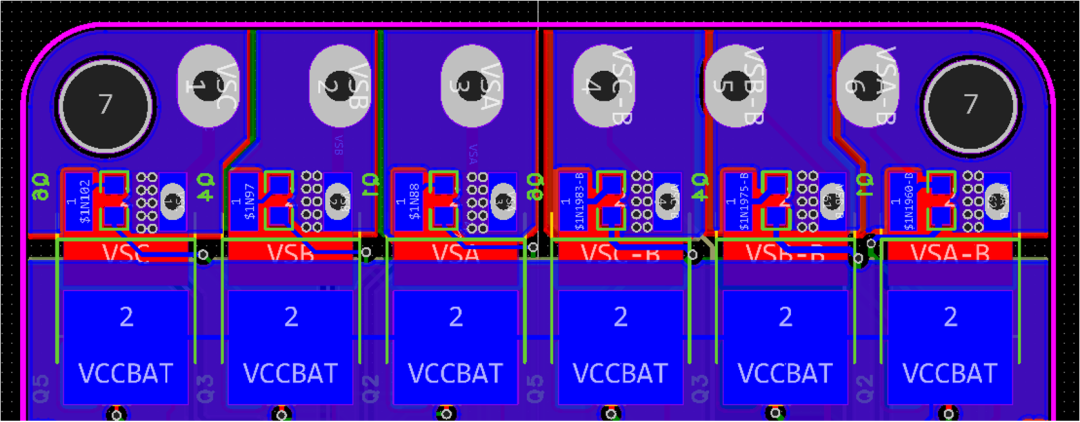
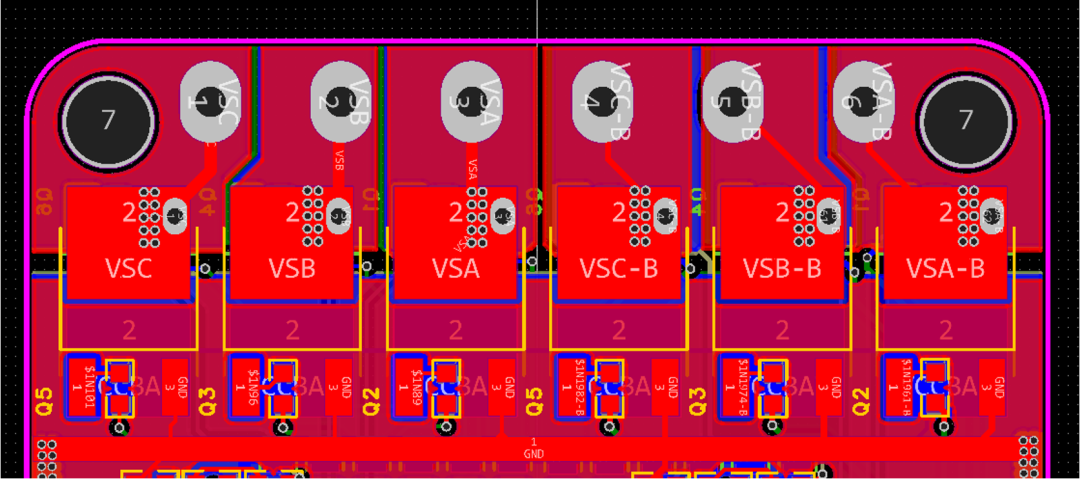
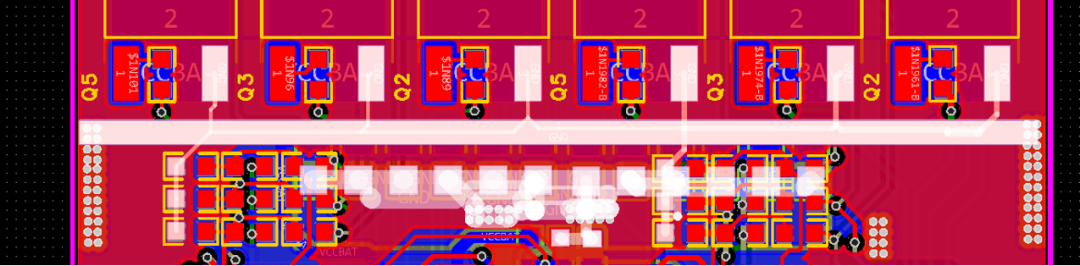
▲ 图2.1.9 MOS输出PCB背面这里我们可以看出,我们虽然设计的是二合一无刷驱动,但实际上,无刷驱动是分开的,既分为左右两路输出,NMOS的布局则是将三相的上下管对应上下分布,之间过流通过大过孔进行连接,这样设计的原因是因为电调实际工作过程中,稳压电路工作只负责芯片的供电,而NMOS则直接从电源取电,大电流均是经过NMOS输出,所以这里将上下管上下相对设计,不仅解决了NMOS对应问题,也通过直接过孔焊接,避免了MOS在同一平面上时通过开窗或铺铜输出,铜皮面积小导致的过流有限的问题,我们直接通过MOS进行过流,而为了避免电源输入与回流受限的问题,我们所制作的四层板,上三层均铺地铜,底层为VCCBAT即电源输入的铜皮。
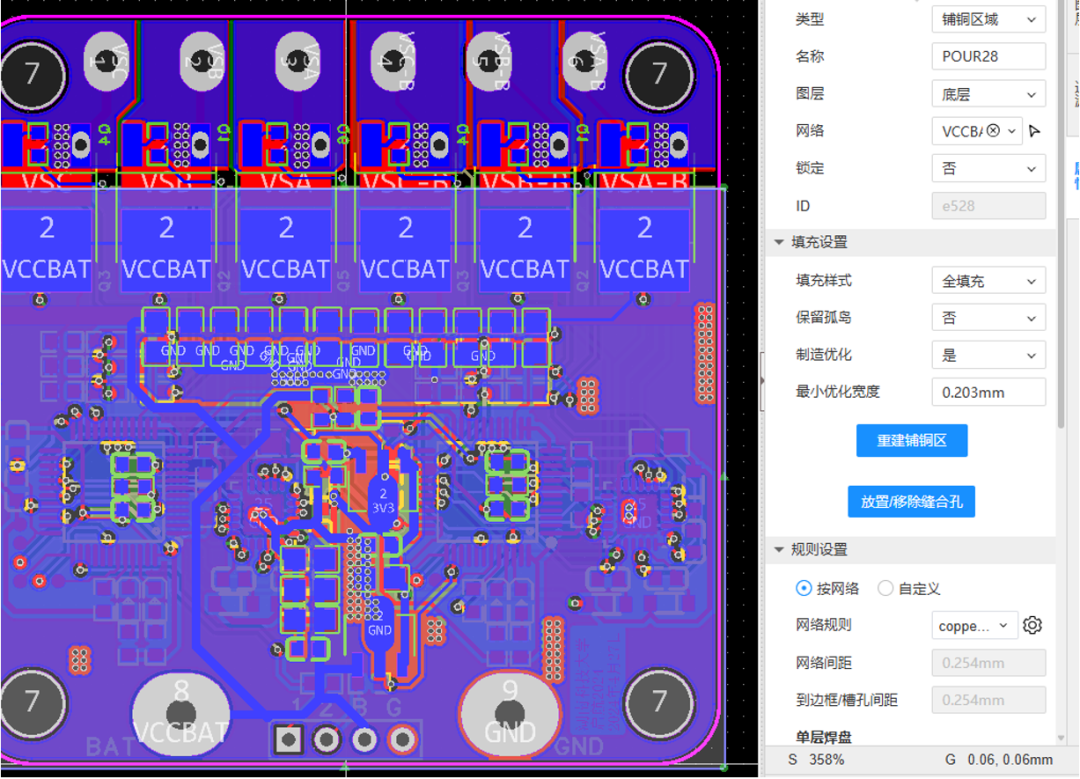
▲ 图2.1.10 底层PCB布局以及铺铜情况底层也是我们整块电调的供电核心,这里我们将电源滤波电容向后放置为一排,而非和其他人一样,纵向放置,主要原因也是因为我们电源输入集中在底层,直接经过NMOS,再经NMOS与过孔以及元件连通到其他三层。其他三层则是主要使用过孔与叠加大地层,有效解决了板载过流与散热的问题。我们的电调在工作过程中,NMOS的发热会通过电路板热量均匀分布,避免电路板出现过热的情况。
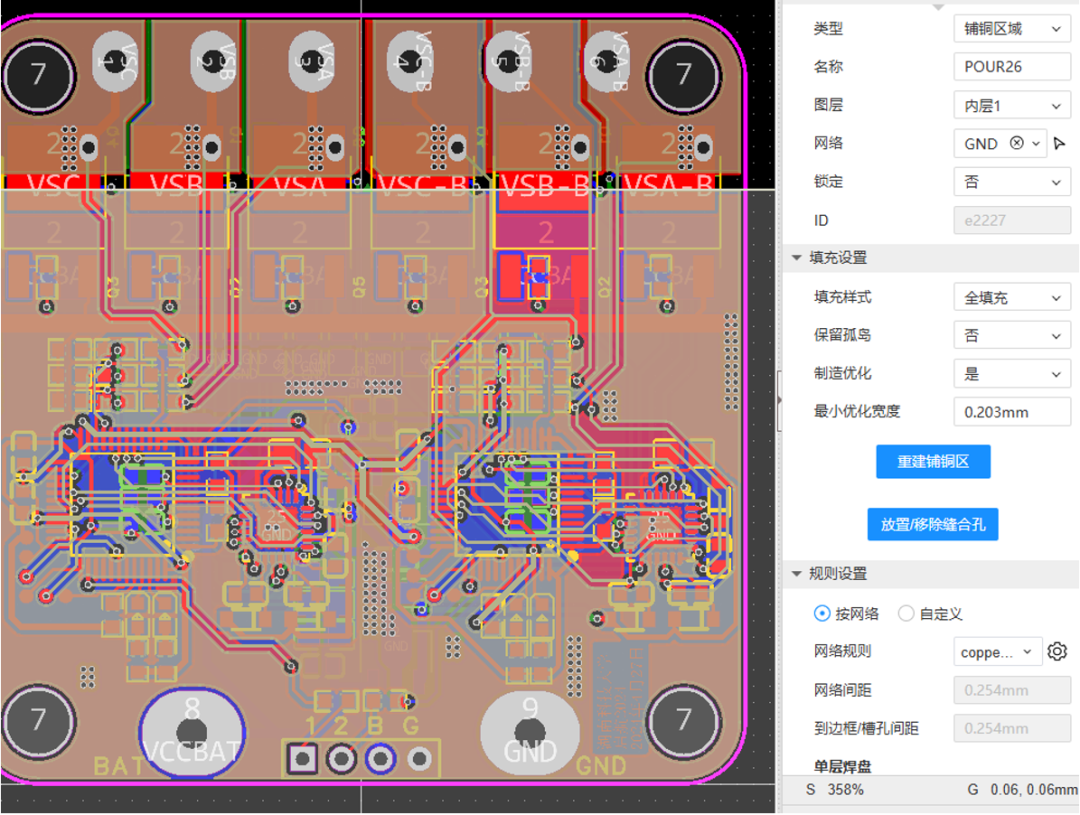
▲ 图2.3.4 内层1PCB布局以及铺铜情况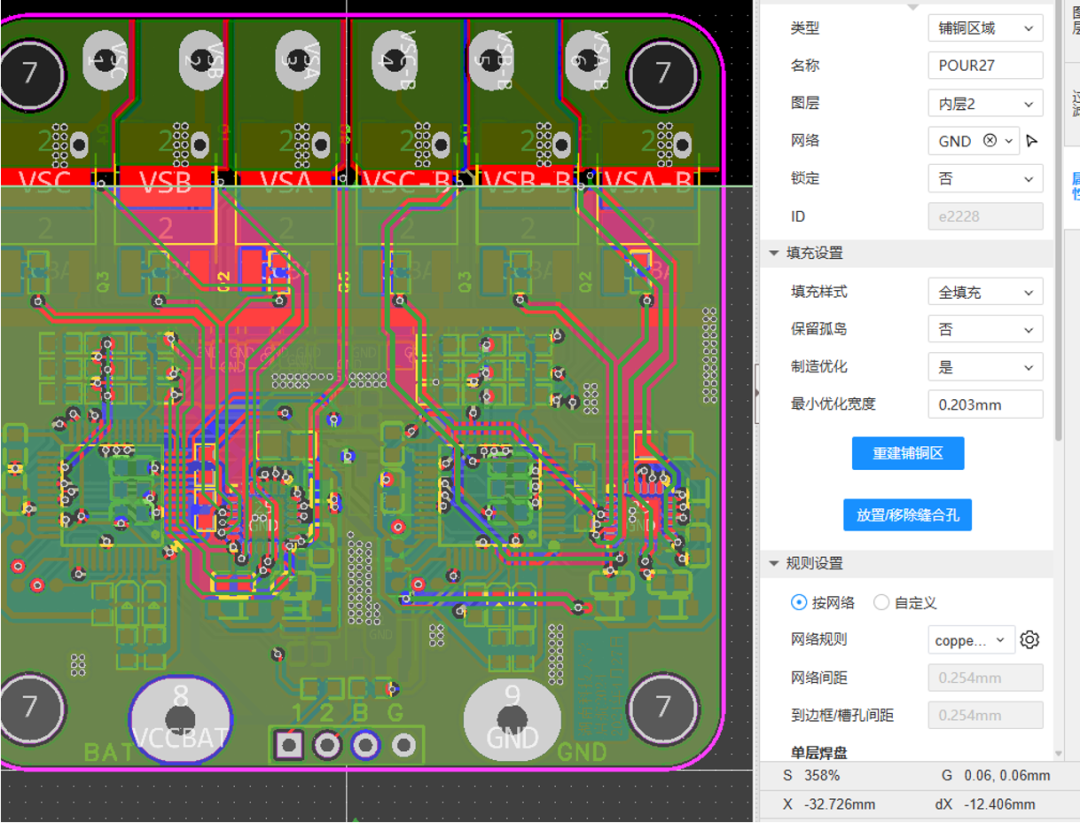
▲ 图2.3.5 内层2PCB布局以及铺铜情况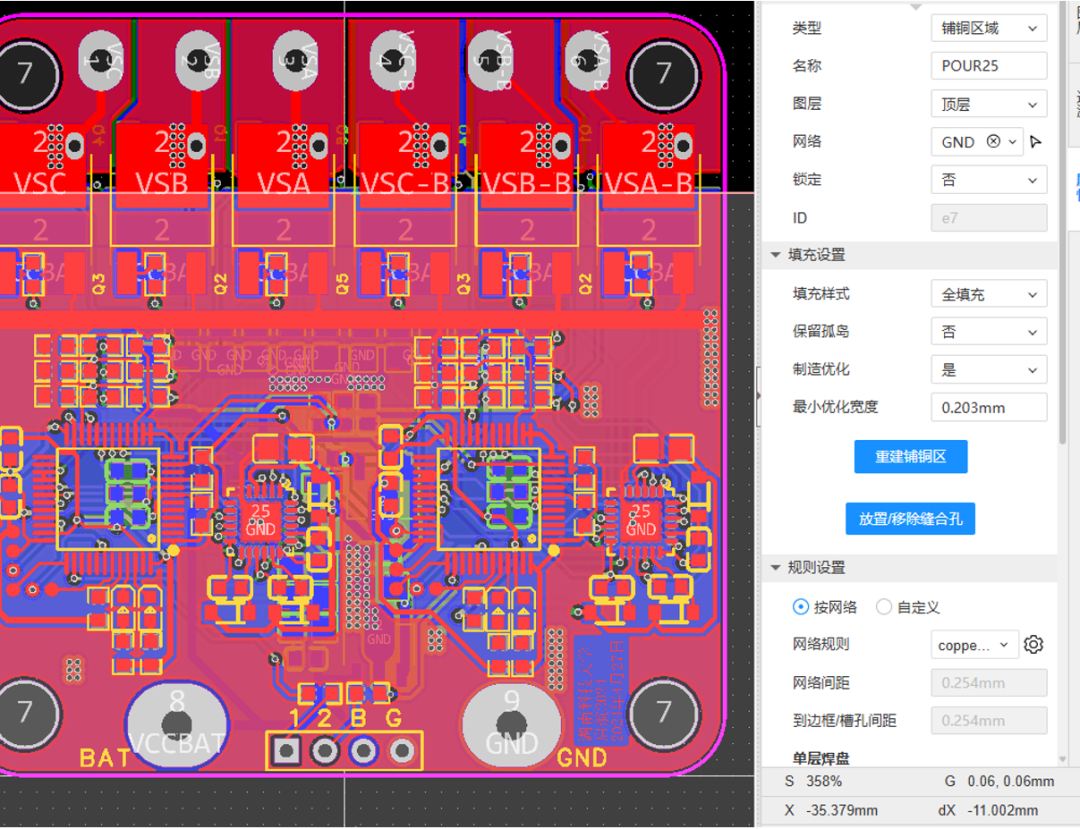
▲ 图2.3.6 顶层PCB布局以及铺铜情况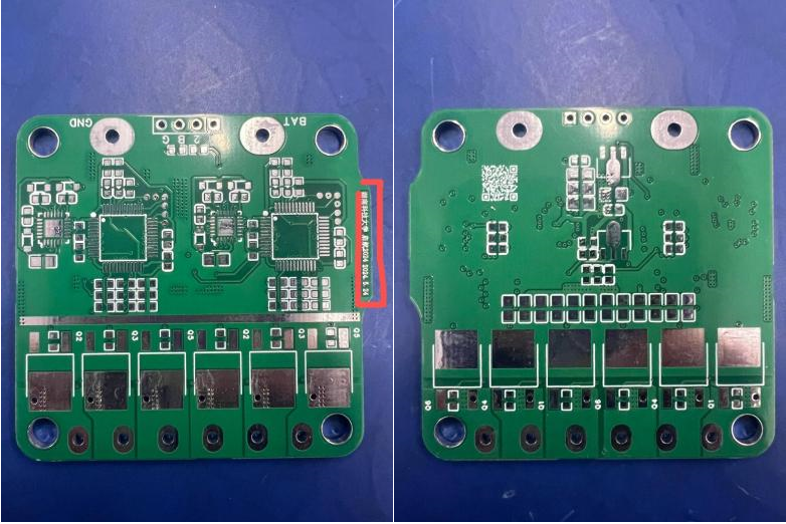
▲ 图2.3.7 实物图以上展示了上三层的GND,以及三相铺铜设计,三相通过四层铺铜,叠加输出层,增强了我们的电调过流能力。
▲ 图2.3.8 电调开窗设计这里我们进行了一条开窗的设计,意在预留一定的空间,增强我们的电调过流能力,可以通过额外增设铜条或焊锡的方式,通过过孔扩大地的面积,进一步提高回流过载的能力。
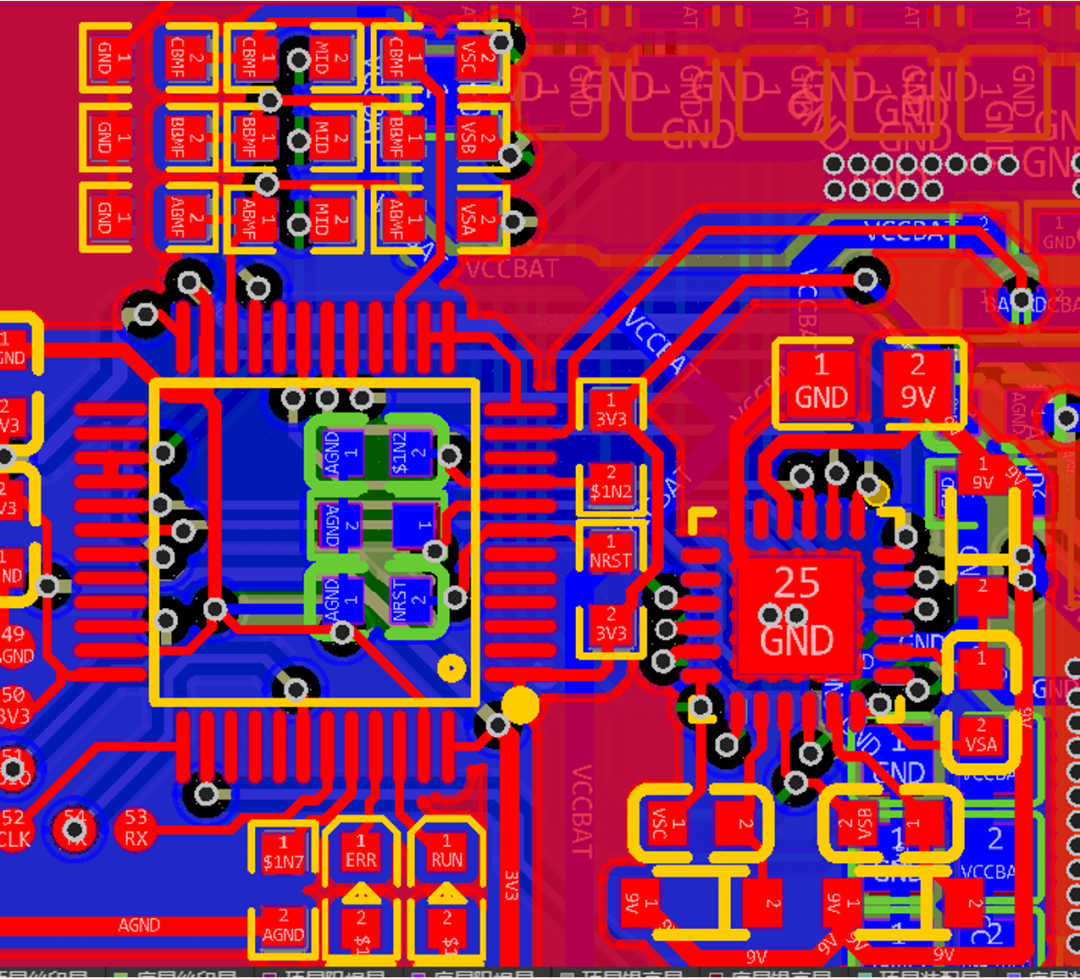
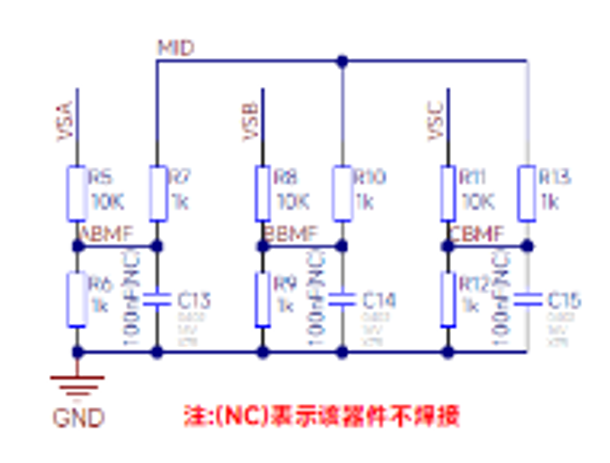
▲ 图2.3.9 预驱芯片与MCU布局设计而换相检测部分电路与芯片布局则并没有进行特殊设计,我们将三相电路进行整齐的布局,方便焊接与更换,换相检测部分电路,实际上就是通过分压电路,检测三相电压,实现六步换相的电压采集。预驱芯片与MCU的布局则是为了方便焊接,并没有采用逐飞科技上下板的布局方式,而是放置在了同一面,这里主要目的就是为了方便焊接,而程序下载部分,我们则学习了逐飞科技的方式,使用了1.27mm间距的焊盘,可以通过焊杜邦线铜丝连接下载器,下载或更新程序。
本文收录了气垫组举报信的应辩书。竞赛组委会同时还收到了关于车模电调设计原理说明文档以及四份调试视频。材料充分佐证了该气垫组队伍自行设计制作了车模机械结构以及电路板,通过自学,在充分理解设计原理的基础上,经过实际调试和改版,完成了参赛车模作品的制作,并通过现场比赛获得华南赛区比赛成绩。最后感谢气垫组同学及时做出的应辩说明,并对他们就举报者的责任的谅解表示欣赏。通过这次的举报和应辩,他们也为智能车竞赛的公开、公平、公正的举行做出了自己的努力。
《一封枪手车举报信: https://www.bilibili.com/read/cv36213462/
