


本文约17,000字
作者 | 北湾南巷
出品 | 汽车电子与软件
#01
无人驾驶出租车(又称自动驾驶出租车或机器人出租车)是指由自动驾驶技术驱动的出租车,无需人为驾驶员,依靠传感器、人工智能和高精度地图等技术实现自动行驶、导航和决策。

这种车辆的核心是自动驾驶系统(Autonomous Driving System, ADS),可以在复杂的交通环境中安全、有效地进行各种驾驶操作。
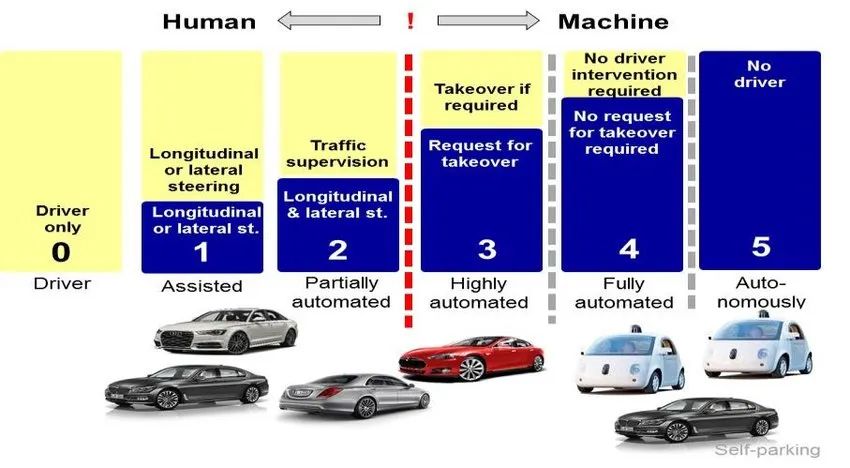
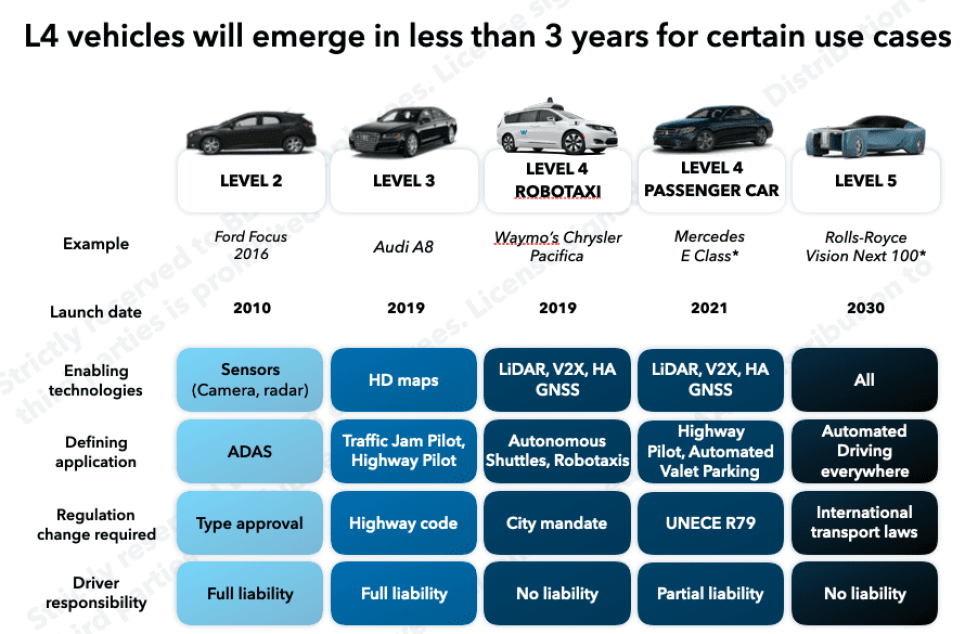
无人驾驶出租车通常被分类为自动驾驶等级中的L4或L5级:
L4级自动驾驶:车辆在特定条件下(如特定区域、特定天气)能够完全自主驾驶,但在复杂或极端情况下仍可能需要人为干预。
L5级自动驾驶:车辆在任何条件下都能完全自主驾驶,无需人为干预。
#02
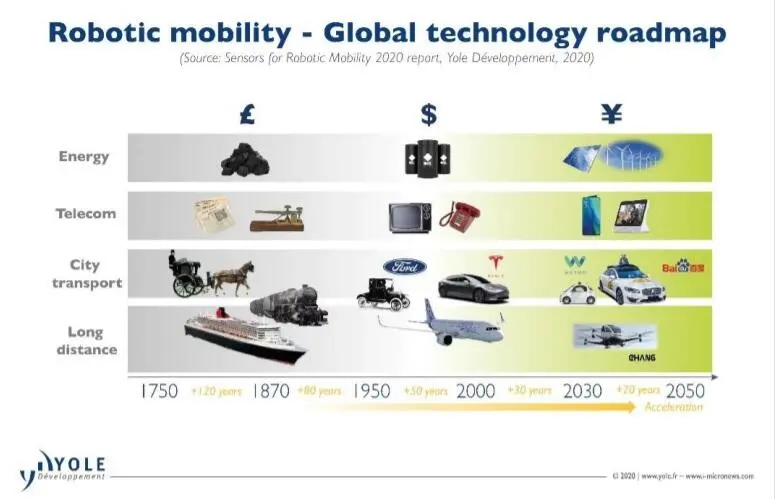
无人驾驶技术的发展可以追溯到20世纪初期,经过了漫长的探索和突破,逐步演变为现代的自动驾驶系统。
1、初期探索(20世纪初 - 1960年代)
1925年:美国发明家Francis Houdina展示了一辆通过无线电控制的汽车,这被认为是最早的自动驾驶汽车雏形。这辆车能够在纽约市的街道上行驶,展示了早期的遥控驾驶技术。
1950年代:随着计算机技术的进步,科学家们开始探索自动驾驶技术的可行性。1953年,General Motors(通用汽车公司)在其未来汽车实验室展示了一款概念车,能够在铺设有电缆的道路上自动行驶。
1960年代:美国达特茅斯学院的John McCarthy提出了“自动驾驶”概念,强调通过计算机控制实现车辆的自主驾驶。
2、冷战时期与军用技术(1970年代 - 1980年代)
1970年代:美国国防部高级研究计划局(DARPA)资助了一些自动驾驶技术的研究项目,主要用于无人驾驶坦克和侦察车。1977年,日本筑波大学开发了一辆能够以每小时30公里速度行驶的自动驾驶汽车。
1980年代:卡内基梅隆大学的Navlab项目和德国慕尼黑大学的EUREKA Prometheus项目是这一时期的重要研究项目。Navlab项目开发了一系列自动驾驶车辆,并进行了大量的道路测试。EUREKA Prometheus项目则致力于开发智能交通系统和自动驾驶技术,是欧洲最大规模的交通研究项目之一。
3、DARPA挑战赛与现代自动驾驶技术的起步(1990年代 - 2000年代)
1994年:德国的VaMP和VITA-2自动驾驶汽车在巴黎-慕尼黑高速公路上完成了一次自动驾驶测试,行驶距离超过1000公里,展示了自动驾驶技术的巨大潜力。
1995年:卡内基梅隆大学的Navlab 5车辆完成了从匹兹堡到加州的无人驾驶横跨美国之旅,总行程超过4500公里,这是自动驾驶技术的一次重大突破。
2004年:DARPA举办了首届“DARPA Grand Challenge”,尽管没有车辆完成赛程,但该比赛极大地推动了自动驾驶技术的发展和公众的关注。
2005年:第二届DARPA Grand Challenge中,斯坦福大学的“Stanley”车辆赢得了比赛,完成了132英里的越野赛道,这标志着自动驾驶技术进入了一个新的阶段。
4、 Google无人驾驶汽车与商业化起步(2010年代)
2009年:Google(现Waymo)启动了无人驾驶汽车项目。Google的无人驾驶汽车项目采用了激光雷达、摄像头、雷达和高精度地图等技术,并在实际道路上进行了大量测试。2015年,Google无人驾驶汽车成功完成了首次完全自动驾驶的公共道路测试。
2016年:Uber在匹兹堡推出了无人驾驶出租车试点项目,乘客可以通过App预约无人驾驶出租车,这是无人驾驶技术的一次商业化探索。
2018年:Waymo在美国亚利桑那州的凤凰城启动了全球首个商业化无人驾驶出租车服务,标志着无人驾驶技术进入了商业化应用阶段。
产品 | 时间 | 技术 | 特征 | 技术成熟度等级 | 参考链接 |
Leonardo的自推进车 | 1478 | 弹簧和平衡轮 | 固定路线 | 1 | Leonardo's self-propelled cart |
Houdina无线电控制车 | 1925 | 近距离无线电控制 | 需要无线电控制 | 6 | Houdina radio control car |
GM Firebird II 概念车 | 1956 | 引导系统 | 需要有线公路 | 2 | GM Firebird II Concept Car |
克莱斯勒帝国 1958 | 1958 | 巡航控制 | 第一辆配备巡航控制的汽车 | 9 | Chrysler Imperial 1958 |
斯坦福带视频处理的车 | 1979 | 图像处理 | 无需人工干预的自主导航 | 4 | Stanford Cart with video processing |
VaMP无人驾驶汽车 | 1995 | 计算机视觉 | 无需人工干预的长距离行驶 | 6 | VaMP driverless car |
DARPA 自动驾驶汽车挑战赛 | 2004 | 多种技术 | 刺激了行业发展 | 6 | DARPA Grand Challenge of Autonomous Vehicle |
谷歌无人驾驶汽车 | 2009 | 物联网(IoT) | 科技巨头投资 | 7 | Google self driving car |
特斯拉自动驾驶 | 2016 | 自动驾驶系统 | 所有生产的汽车都配备自动驾驶系统 | 9 | Tesla Autop |
无人驾驶出租车的发展是多种技术集成创新的结果,从早期的机械控制、无线电控制到现代的人工智能和传感器技术,无人驾驶技术经历了漫长的发展历程。随着技术的不断进步和应用的不断推广,无人驾驶出租车将成为未来智能交通系统的重要组成部分,为人们的出行带来更加安全、便捷和高效的体验。
#03
3.1 技术前沿的重要性
1、颠覆性的科技创新
无人驾驶出租车代表了多个前沿技术的综合应用,包括人工智能、机器学习、计算机视觉、高精度地图、传感器技术和通信技术等。这些技术的进步不仅推动了自动驾驶领域的发展,还对其他科技领域产生了深远的影响。例如,人工智能和机器学习技术的进步为大数据分析、医疗诊断、金融科技等多个领域提供了强大的工具和解决方案。
2、技术融合与创新生态
无人驾驶出租车的研发和应用需要跨学科的协作,包括计算机科学、电子工程、机械工程、交通工程等多个领域的专家共同参与。这种技术融合不仅促进了学科之间的合作与交流,还催生了新的创新生态系统。许多初创公司、科研机构和传统汽车制造商纷纷投身于这一领域,推动了技术的快速迭代和产业的发展。
3、智能交通系统的核心
无人驾驶出租车是智能交通系统的重要组成部分。智能交通系统(Intelligent Transportation Systems, ITS)旨在通过先进的信息技术和通信技术,提高交通运输系统的效率、安全性和可持续性。无人驾驶出租车可以通过与其他智能交通设备和系统的协同工作,实现更高效的交通管理和控制,减少交通拥堵,提高道路利用率。
4、数据驱动的决策与优化
无人驾驶出租车依赖于大量的实时数据来进行决策和优化。这些数据包括车辆的位置信息、速度、周围环境信息(如道路状况、交通信号等)和乘客需求等。通过大数据分析和人工智能技术,可以实现更加精确和高效的交通管理,优化路线规划,减少能源消耗和排放,从而推动绿色交通和可持续发展。

5、产业链的升级与创新
无人驾驶出租车的研发和应用带动了整个产业链的升级和创新。从上游的芯片制造、传感器研发,到中游的车辆制造、软件开发,再到下游的出行服务、运营管理,整个产业链都在向智能化、高端化和绿色化方向发展。这不仅促进了相关产业的技术进步和经济增长,也为社会创造了大量的就业机会和发展机会。

3.2 未来交通的变革
1、交通安全的提升
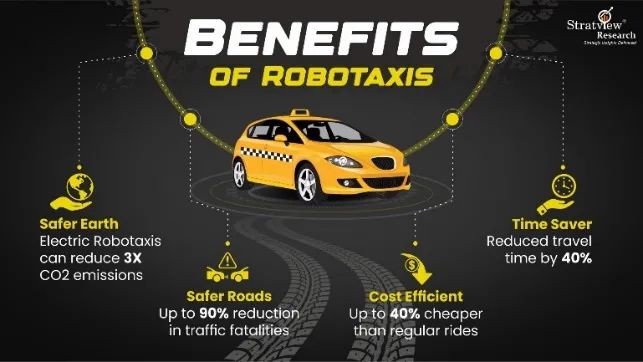
无人驾驶出租车通过先进的传感器和人工智能技术,可以实时监测和分析道路环境,做出快速反应,减少人为驾驶错误带来的交通事故。据统计,超过90%的交通事故是由人为错误引起的,无人驾驶技术的普及有望显著降低交通事故率,提升交通安全性。

2、出行效率的提高
无人驾驶出租车可以通过优化路线、动态调度和车队管理,提高出行效率。无人驾驶系统可以实时分析交通状况,选择最优路线,避免交通拥堵,从而减少出行时间。同时,无人驾驶出租车可以实现24/7全天候运行,提高车辆利用率,满足不同时段的出行需求。

3、环境保护与可持续发展
无人驾驶出租车普及后,可以通过优化驾驶行为和路线规划,减少能源消耗和排放。许多无人驾驶出租车采用电动汽车或混合动力汽车,进一步减少了对传统燃油的依赖和环境污染。此外,无人驾驶出租车可以通过共享出行模式,减少私人汽车的拥有量和使用频率,从而降低道路拥堵和停车压力,推动绿色交通的发展。
4、出行方式的变革
无人驾驶出租车将改变人们的出行方式,提供更加灵活和便捷的出行选择。乘客可以通过手机APP一键呼叫无人驾驶出租车,无需等待和寻找停车位,享受“端到端”的出行服务。这种新型出行方式不仅方便了日常通勤,还可以为老年人、残障人士等提供更加便利的出行服务,提升社会的整体出行质量。

5、城市规划与基础设施的优化
无人驾驶出租车的普及将对城市规划和基础设施建设产生深远的影响。城市规划者可以根据无人驾驶技术的特点,优化道路布局和交通管理,减少交通拥堵和事故发生。同时,无人驾驶出租车的普及将减少私人汽车的拥有量,降低停车场和停车位的需求,为城市腾出更多的公共空间,用于绿化、公共设施和社区服务等。

6、经济效益与社会效益
无人驾驶出租车的发展将带来巨大的经济效益和社会效益。无人驾驶出租车的普及将催生新的商业模式和市场需求,推动相关产业的发展和创新,带动经济增长。同时,交通安全的提升、出行效率的提高和环境保护的推进,将为社会创造更加和谐、可持续的发展环境,提升人们的生活质量。

结 论
讨论无人驾驶出租车不仅是对技术前沿的重要探索,也是对未来交通变革的前瞻性思考。无人驾驶出租车的普及将带来交通安全、出行效率、环境保护等多方面的巨大变革,推动智能交通系统的发展,创造更多的经济和社会效益。随着技术的不断进步和应用的逐步推广,无人驾驶出租车将在未来的交通系统中扮演越来越重要的角色,为人类创造更加安全、便捷和可持续的出行环境。
#04
4.1 核心技术
无人驾驶技术依赖于多种核心技术的协同工作,这些技术共同构建了一个复杂而高效的自动驾驶系统。
以下是无人驾驶技术的主要核心技术:
1.传感器技术
2.人工智能与机器学习
3.高精度地图与导航
4.车载计算平台与软件系统
4.1.1 传感器技术
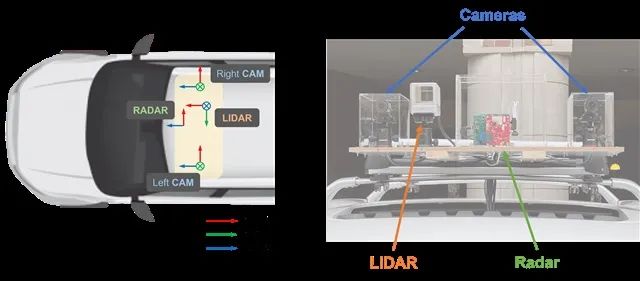
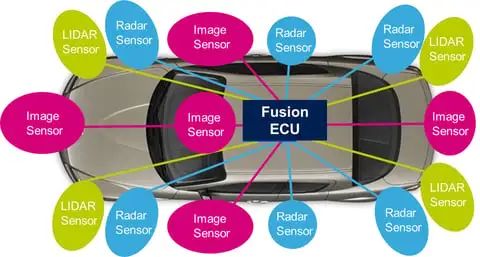
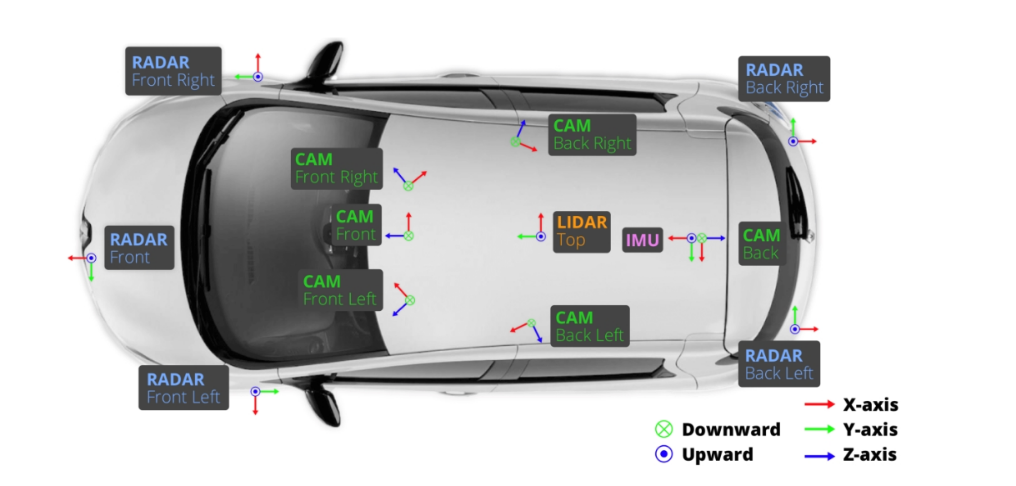
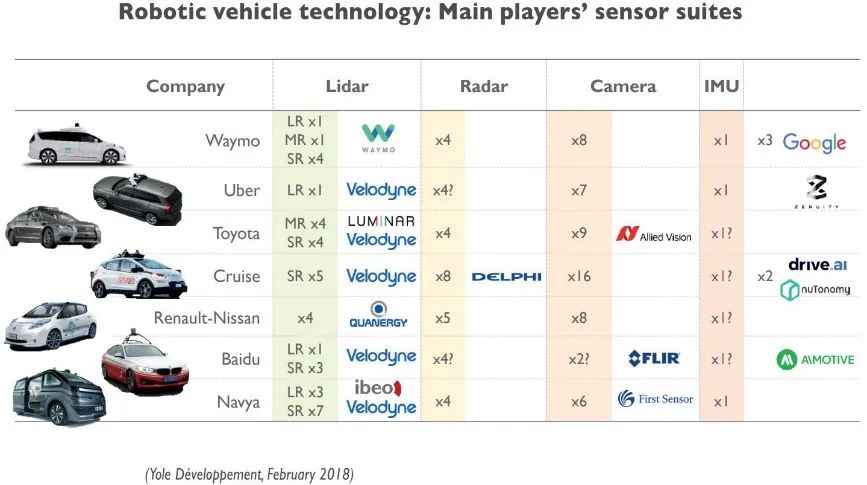
传感器技术是无人驾驶技术的基础,通过各种传感器收集车辆周围环境的信息,使车辆能够感知和理解周围的世界。主要传感器包括LIDAR、摄像头和雷达。
1、激光雷达(LIDAR)
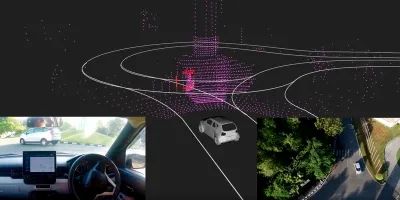
工作原理:LIDAR(Light Detection and Ranging)通过发射激光束并接收反射回来的激光信号,测量物体的距离、形状和速度。通过扫描环境,LIDAR可以生成高精度的三维地图。

优点:
高精度:能够生成详细的三维点云,精度高达厘米级。
宽视野:通常具有360度的视野,能够全面感知周围环境。
高速响应:快速扫描和数据处理能力,适用于高速行驶的车辆。
缺点:
成本高:LIDAR传感器价格昂贵,增加了无人驾驶系统的总体成本。
天气影响:在雨、雪、雾等恶劣天气条件下,LIDAR的性能可能受到影响。
2、摄像头
工作原理:摄像头通过捕捉光线生成图像,模仿人类视觉系统,提供丰富的视觉信息。通常使用多个摄像头(立体视觉)来实现深度感知。
优点:
丰富的信息:能够捕捉颜色、纹理、形状等详细的视觉信息。
成本低:相对于LIDAR和雷达,摄像头的成本较低。
多功能:可以用于物体识别、车道线检测、交通标志识别等多种任务。
缺点:
受光照影响:在强光、阴影和夜间条件下,摄像头的性能可能下降。
数据处理复杂:需要复杂的算法进行图像处理和分析。
3、雷达
工作原理:雷达(Radio Detection and Ranging)通过发射无线电波并接收反射回来的信号,测量物体的距离和速度。雷达可以穿透雨、雪、雾等恶劣天气条件。
优点:
全天候工作:不受光线和天气条件的影响,能够在恶劣环境中稳定工作。
速度测量:能够精确测量物体的相对速度,适用于碰撞预警和自适应巡航控制。
成本适中:相比LIDAR,雷达的成本较低。
缺点:
分辨率较低:雷达的空间分辨率不如LIDAR和摄像头,细节感知能力较弱。
视角有限:雷达通常具有有限的视角范围,需要与其他传感器结合使用。
传感器类型 | 工作机制 | 优点 | 缺点 |
视觉传感器 | 光敏传感器形成图像 | 能分类物体;各系统间互不干扰;附带算法 | 需要大量处理;受光照和天气条件影响;需要清晰的视线 |
激光雷达(LIDAR) | 光和激光反射 | 远程;大视野;高角分辨率 | 受光照和天气条件影响;需要清晰的视线;需要良好反射的物体;由于法规限制,激光功率有限 |
雷达(RADAR) | 无线电波反射 | 远程;大视野;高距离精度;不受光照和天气条件影响;不需要直接视线 | 范围和视野之间存在权衡;在非常短的范围内工作不佳;低角分辨率和精度;可能与其他雷达传感器干扰 |
超声波传感器 | 高频音频信号反射 | 简单可靠;低成本;能检测非常近的物体 | 范围短;在高速时风效应可能成为问题;可能与其他超声波传感器干扰 |
4.1.2 人工智能与机器学习
人工智能(AI)和机器学习(ML)是无人驾驶技术的核心,它们使车辆能够理解、决策和执行复杂的驾驶任务。

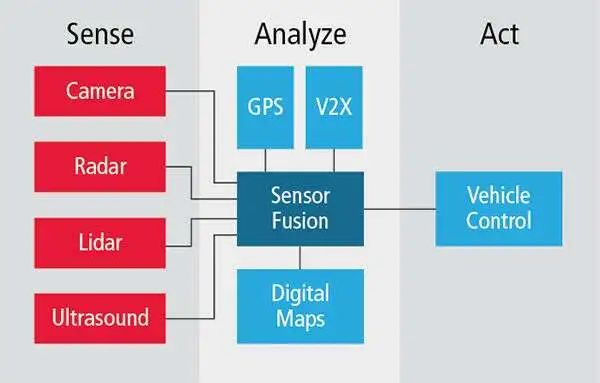
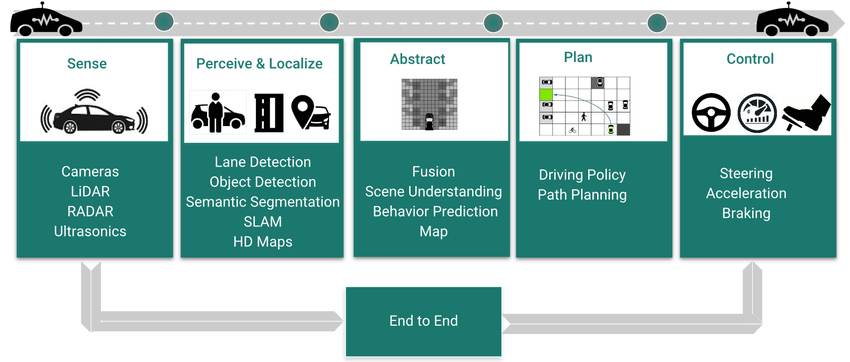
1、感知
图像识别与处理:使用深度学习算法对摄像头捕捉的图像进行分析,识别道路标志、交通信号灯、行人、车辆等。
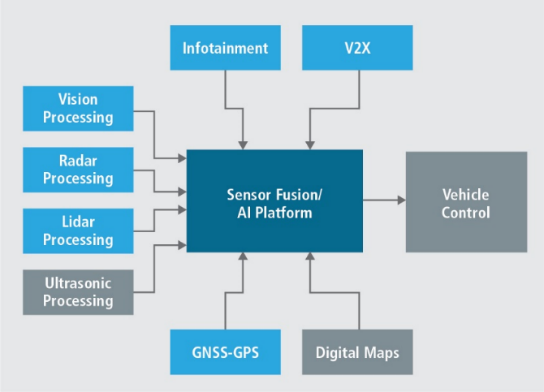
传感器融合:将来自LIDAR、雷达、摄像头等多种传感器的数据进行融合,生成一个综合的环境感知模型。
2、预测
行为预测:通过分析周围车辆、行人等的历史行为,预测其未来的运动轨迹。
环境变化:预测交通信号灯变化、路况变化等动态环境因素。
3、规划与决策
路径规划:使用规划算法(如A*算法、Dijkstra算法)计算最优行驶路线。
行为决策:基于环境感知和行为预测结果,制定车辆的行驶策略,包括变道、超车、停车等。
4、控制
运动控制:使用控制算法(如PID控制、模型预测控制)控制车辆的转向、加速、刹车等动作,实现平稳、安全的驾驶。
反馈系统:实时监测车辆的状态和位置,通过闭环控制系统进行调整和优化。
4.1.3 高精度地图与导航
高精度地图与导航系统为无人驾驶车辆提供详细的道路信息和定位服务,确保车辆能够准确、安全地行驶。
1、高精度地图
定义:高精度地图(High-Definition Map, HD Map)包含道路的详细信息,包括车道线、交通标志、路面标记、三维建筑物等,精度达到厘米级。
功能:
定位:辅助车辆进行高精度的自定位,结合GPS和传感器数据,提供厘米级的定位精度。
导航:提供详细的道路信息,辅助路径规划和导航。
环境感知:为传感器数据提供参考,提高环境感知的准确性和可靠性。

2、导航系统
全球定位系统(GPS):提供基础的定位信息,通过卫星信号确定车辆的位置。
惯性导航系统(INS):使用加速度计、陀螺仪等传感器,提供车辆的位移和旋转信息,辅助GPS进行定位。
定位融合:将GPS、INS和高精度地图的数据进行融合,提供精确的定位和导航服务。
4.1.4 车载计算平台与软件系统
无人驾驶技术需要强大的计算能力和稳定的软件系统来处理大量的传感器数据、执行复杂的算法和实时控制车辆。
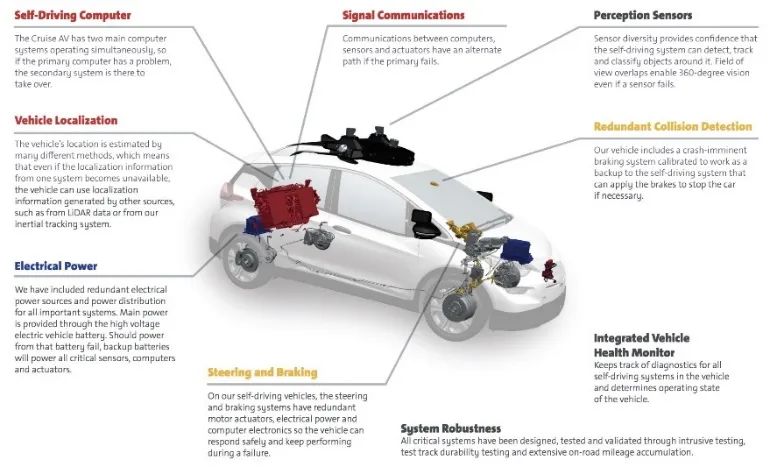
1、车载计算平台
中央计算单元(ECU):无人驾驶车辆通常配备多个ECU,分别负责感知、决策、控制等不同功能。
GPU和FPGA:用于加速深度学习和图像处理算法的计算,提供高性能的并行计算能力。
冗余设计:为了确保系统的可靠性和安全性,车载计算平台通常采用冗余设计,包括双重或多重备份的硬件和软件。
2、软件系统
操作系统:无人驾驶车辆通常运行实时操作系统(RTOS),确保系统的实时性和稳定性。
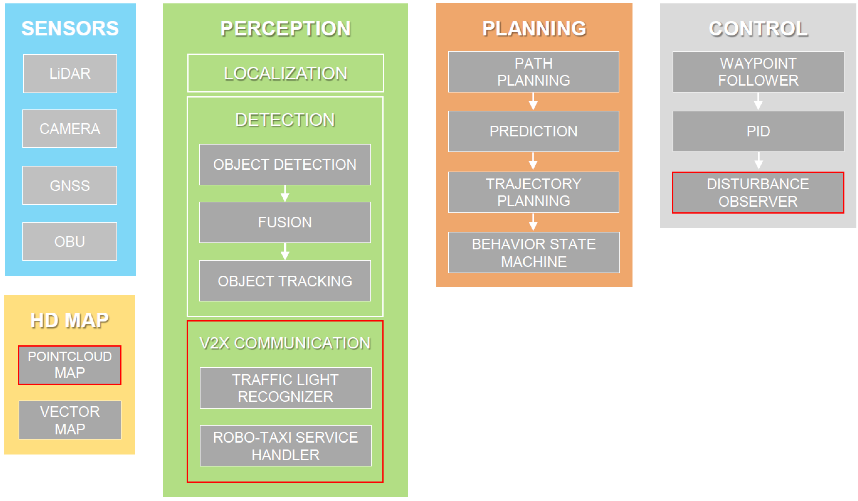
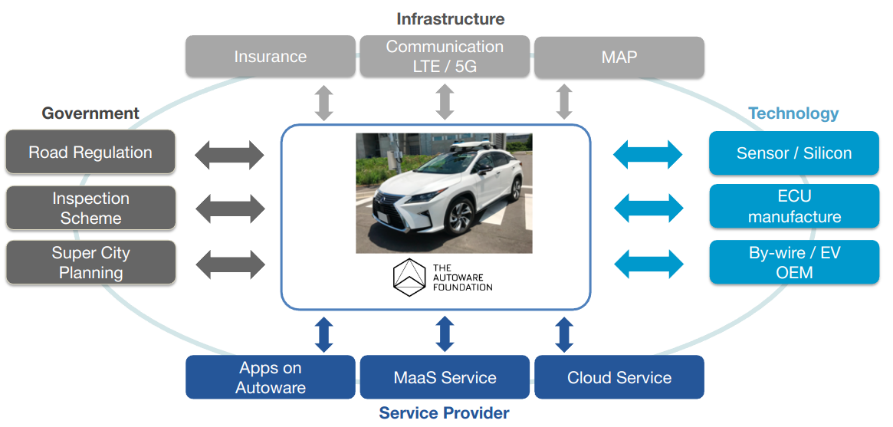
中间件:提供传感器数据的采集、处理和通信功能,常见的中间件包括ROS(Robot Operating System)和Autoware等。
应用软件:包括感知、预测、规划、控制等各个模块的软件,实现车辆的自主驾驶功能。
安全与监控:包括故障检测、诊断、故障恢复等功能,确保系统在各种情况下的安全性和可靠性。
结 论
无人驾驶技术是多个前沿技术的综合应用,包括传感器技术、人工智能与机器学习、高精度地图与导航、车载计算平台与软件系统等。这些技术的协同工作,使无人驾驶车辆能够实现安全、高效和可靠的自动驾驶。随着技术的不断进步和完善,无人驾驶技术将在未来的交通系统中发挥越来越重要的作用,为人们的出行带来更加智能、便捷和环保的体验。
#05
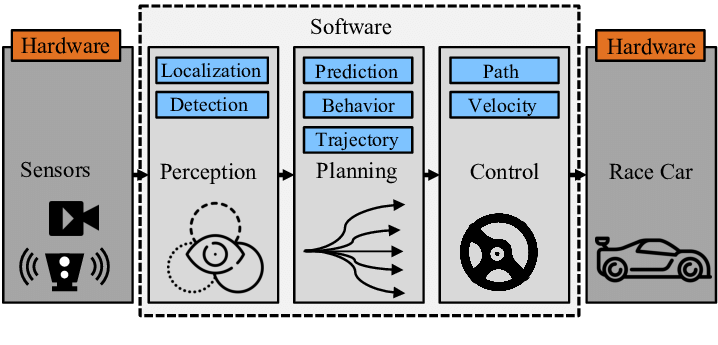
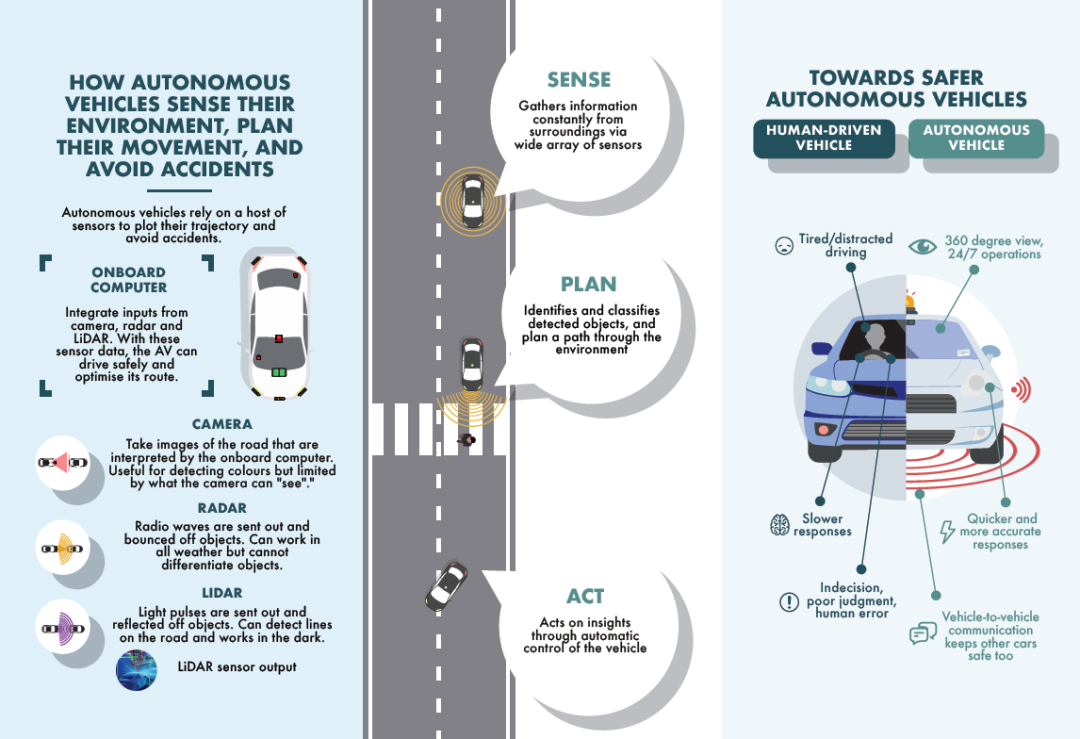
现阶段的无人驾驶技术主要集中在三个方面:感知技术、决策与控制技术、高精度地图与定位技术。
这些技术路线涵盖了无人驾驶系统的核心要素,从环境感知、路径规划到车辆控制,形成了一个完整的自动驾驶体系。
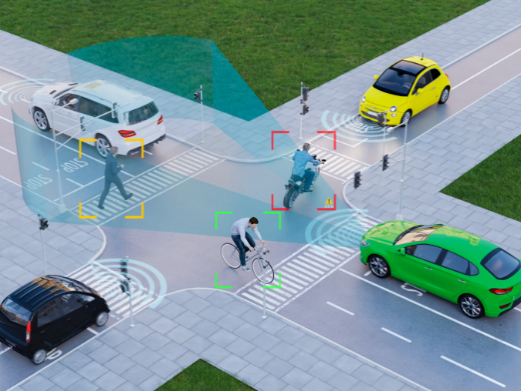
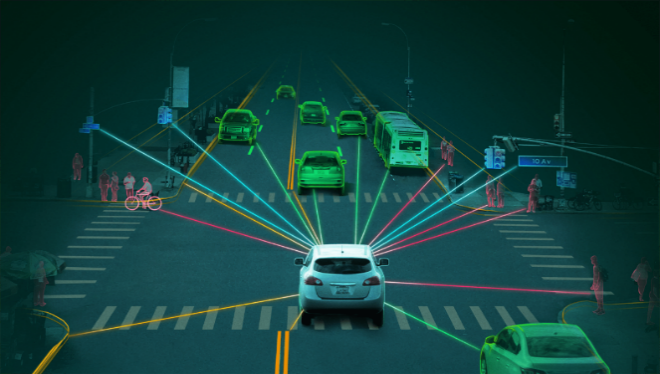
1、感知技术
传感器融合:现阶段的无人驾驶车辆通常配备多种传感器,包括LIDAR、摄像头、雷达和超声波传感器等。通过传感器融合技术,将不同传感器的数据进行综合处理,生成一个全面、精确的环境感知模型。
计算机视觉:利用深度学习算法对摄像头捕捉的图像进行分析,识别道路标志、交通信号灯、行人、车辆等。计算机视觉技术的发展大大提高了无人驾驶车辆的感知能力。
2、决策与控制技术
行为预测:通过分析周围车辆和行人的历史行为,预测其未来的运动轨迹,从而制定相应的驾驶策略。行为预测是确保安全驾驶的关键技术之一。
路径规划:现阶段的无人驾驶车辆采用各种路径规划算法,如AI算法、Dijkstra算法和随机树搜索算法等,计算最优行驶路线,避免障碍物和交通拥堵。
运动控制:使用控制算法(如PID控制、模型预测控制)控制车辆的转向、加速、刹车等动作,确保车辆平稳、安全地行驶。
3、高精度地图与定位技术
高精度地图:现阶段的无人驾驶车辆依赖于高精度地图,提供详细的道路信息,包括车道线、交通标志、路面标记、三维建筑物等。高精度地图是无人驾驶系统进行精准定位和路径规划的基础。
定位融合:利用GPS、惯性导航系统(INS)和高精度地图的数据进行融合,提供厘米级的定位精度。定位融合技术确保无人驾驶车辆能够在复杂的道路环境中准确定位。
4、车联网与通信技术
V2X(Vehicle-to-Everything)通信:通过V2X通信技术,无人驾驶车辆可以与其他车辆(V2V)、基础设施(V2I)和行人(V2P)进行通信,交换实时信息,提高交通安全和效率。
5G技术:5G网络的高带宽、低延迟特性为无人驾驶车辆提供了可靠的通信支持,使得实时数据传输和远程控制成为可能。
5、人工智能与机器学习
深度学习:深度学习技术广泛应用于图像识别、语音识别和自然语言处理等领域,为无人驾驶车辆提供了强大的数据分析和决策能力。
强化学习:通过强化学习算法,无人驾驶车辆可以在模拟环境中进行自主学习和优化,提高驾驶策略的智能化水平。
6、安全与冗余设计
系统冗余:为了确保无人驾驶系统的可靠性,现阶段的无人驾驶车辆通常采用冗余设计,包括双重或多重备份的硬件和软件。
安全监控:实时监测系统状态,进行故障检测和诊断,确保在异常情况下系统能够及时采取安全措施。
结 论
无人驾驶技术的发展历程从早期的无线电控制和计算机模拟,到现代的传感器融合、人工智能和高精度地图,经历了多个阶段的突破和创新。现阶段的无人驾驶技术主要集中在感知、决策、控制、高精度地图与定位、车联网与通信以及人工智能等核心领域,通过多种技术的协同工作,实现了无人驾驶车辆的安全、高效和可靠的自动驾驶。随着技术的不断进步和应用的广泛推广,无人驾驶技术将继续推动未来交通系统的变革,为人们的出行带来更多的便利和创新。
#06
6.1 安全性提升
1、减少人为驾驶失误
统计数据:研究显示,超过90%的交通事故是由人为驾驶失误引起的,包括分心驾驶、疲劳驾驶、酒驾和违反交通规则等。无人驾驶出租车通过自动化驾驶系统,可以大幅减少这些人为失误。
实时监控与响应:无人驾驶出租车配备了先进的传感器和计算机视觉系统,能够实时监控周围环境,并快速响应突发情况。与人类驾驶员相比,自动驾驶系统在处理紧急情况时反应更迅速、决策更准确。
一致性与可靠性:无人驾驶系统在所有情况下都能保持一致的驾驶行为,不会因疲劳、情绪波动或其他因素而受到影响,从而提高整体行车安全性。
2、全天候运行能力
不受时间限制:无人驾驶出租车可以24/7全天候运行,不受驾驶员工作时间限制。这意味着可以随时提供服务,满足乘客的出行需求,无论是深夜还是早晨。
应对恶劣天气:尽管恶劣天气可能影响传感器性能,但无人驾驶出租车可以通过多传感器融合技术和高精度地图,依然保持较高的运行可靠性。在恶劣天气条件下,自动驾驶系统的表现往往优于人类驾驶员。

6.2 效率与便利
1、优化交通流量
智能交通管理:无人驾驶出租车可以通过V2X(Vehicle-to-Everything)通信与其他车辆和交通基础设施进行实时信息交换,优化行车路线,避免交通拥堵。智能交通管理系统可以协调多个无人驾驶车辆,实现交通流量的整体优化。
减少交通事故:无人驾驶出租车的高安全性和可靠性可以减少交通事故发生,降低事故造成的交通堵塞和延误,从而提高整体交通流量的通畅度。
2、提高出行效率
动态调度与车队管理:无人驾驶出租车可以通过动态调度系统,根据实时交通状况和乘客需求,优化车辆分配和行驶路线,提高车辆利用率和服务效率。车队管理系统可以协调多个无人驾驶出租车,实现高效的运营管理。

快速响应与无缝连接:乘客可以通过手机APP随时呼叫无人驾驶出租车,无需等待和寻找停车位,实现“门到门”的无缝连接出行。无人驾驶出租车的快速响应和便捷服务提升了整体出行效率。

6.3 环境友好
1、节能减排潜力
优化驾驶行为:无人驾驶出租车通过智能驾驶系统,可以实现更加平稳和节能的驾驶行为,包括减少急加速、急刹车和怠速时间,从而降低燃油消耗和尾气排放。
减少交通拥堵:无人驾驶出租车的优化交通流量和减少交通事故,可以减少交通拥堵,进一步降低车辆在道路上的燃油消耗和排放。
2、电动化趋势与配套基础设施
电动汽车的应用:许多无人驾驶出租车采用电动汽车技术,进一步减少对化石燃料的依赖和环境污染。电动汽车的零排放特性有助于改善城市空气质量,推动绿色交通发展。
充电基础设施:无人驾驶出租车的电动化趋势推动了充电基础设施的建设和发展。智能充电网络可以根据车辆的电量状态和行驶计划,优化充电时间和地点,提高充电效率和便利性。

可再生能源的整合:无人驾驶出租车的充电需求可以与可再生能源系统(如太阳能、风能)相结合,进一步减少碳足迹,推动可持续交通的发展。
结 论
无人驾驶出租车在安全性提升、效率与便利、环境友好等方面具有显著优势。通过减少人为驾驶失误、实现全天候运行、优化交通流量和提高出行效率,无人驾驶出租车不仅提升了整体出行体验,还对环境保护和可持续发展做出了重要贡献。随着技术的不断进步和推广应用,无人驾驶出租车将在未来的交通系统中扮演越来越重要的角色,为社会创造更多的经济和社会效益。
#07
7.1 技术难题
1、复杂场景下的感知与决策
多样化的环境感知:无人驾驶出租车需要在各种复杂环境中运行,包括城市街道、高速公路、乡村道路等。每种环境都有独特的挑战,如城市中的行人和自行车、高速公路上的高速车辆、乡村道路上的障碍物等。无人驾驶系统需要高精度的传感器和先进的算法来感知这些多样化的环境。
动态环境中的决策:在动态环境中,无人驾驶出租车需要实时决策,处理突发情况,如突然出现的行人、其他车辆的急停或变道等。这需要高效的计算能力和先进的决策算法来确保安全和效率。

极端天气条件:在雨雪、雾霾等恶劣天气条件下,传感器的性能可能受到影响。无人驾驶系统需要具备在恶劣天气中保持可靠感知和决策的能力。
2、系统的可靠性与冗余设计
硬件可靠性:无人驾驶系统依赖多种硬件设备,包括传感器、计算平台和执行机构。这些硬件需要具备高可靠性,能够在各种工作条件下长期稳定运行。关键部件的冗余设计,如多重传感器备份、冗余计算单元等,是确保系统可靠性的必要措施。
软件可靠性:无人驾驶软件系统复杂,涉及感知、决策、控制等多个模块。软件的可靠性需要通过严格的测试和验证,确保在各种情况下都能稳定运行。软件更新和维护也是保持系统可靠性的重要环节。
安全与故障处理:无人驾驶系统需要具备完善的安全机制和故障处理能力,包括实时监测系统状态、自动检测和处理故障、在紧急情况下安全停车等。这些机制确保在任何情况下都能保证乘客和其他道路使用者的安全。
7.2 法律与伦理
1、法律框架与监管标准
法律法规的制定:无人驾驶技术的发展需要法律法规的支持和规范。目前,各国对于无人驾驶车辆的法律框架和监管标准还在逐步制定和完善中。不同国家和地区的法律法规存在差异,跨国运营的无人驾驶出租车需要适应不同的法律环境。
测试与认证:无人驾驶车辆需要通过严格的测试和认证程序,确保其安全性和可靠性。政府和监管机构需要制定相应的测试标准和认证流程,对无人驾驶车辆进行评估和审批。
数据隐私与安全:无人驾驶车辆收集和处理大量数据,包括乘客信息、行驶路线、环境感知数据等。法律法规需要规范数据的收集、存储和使用,保护用户的隐私和数据安全。

2、道德决策与责任归属
道德困境:无人驾驶车辆在面对某些紧急情况时,可能需要做出道德决策,如在无法避免的事故中选择保护乘客还是行人。这些道德困境需要在算法设计中进行考虑,并且社会需要就此达成共识。
责任归属:无人驾驶车辆发生事故时,责任的归属问题复杂,涉及车辆制造商、软件开发商、车主和乘客等多方。法律需要明确各方的责任和义务,以便在事故发生后能够公平合理地处理。

7.3 社会接受度
1、用户信任与普及
用户信任的建立:无人驾驶出租车的普及需要建立在用户对其安全性和可靠性的信任基础上。初期的试点项目和示范运营可以帮助积累用户信任,同时也需要透明的信息公开和教育,让用户了解和接受无人驾驶技术。
服务质量与体验:无人驾驶出租车需要提供优质的服务体验,包括准时到达、安全驾驶、舒适乘坐等。这些因素直接影响用户对无人驾驶出租车的接受度和满意度。
社会文化因素:不同社会文化对新技术的接受度不同。无人驾驶出租车的推广需要考虑文化差异,采取因地制宜的推广策略。
2、传统出租车行业的冲击
就业问题:无人驾驶出租车的普及可能对传统出租车行业造成冲击,特别是对出租车司机的就业产生影响。如何平衡技术进步与就业保障,帮助司机转型,是一个需要解决的社会问题。

行业转型:传统出租车公司需要面对无人驾驶技术带来的行业变革,可能需要调整商业模式,采用新的技术和运营方式,以适应市场变化。
政策支持与培训:政府可以通过政策支持和职业培训,帮助传统出租车司机适应无人驾驶技术的变革,提供再就业机会和技能培训,促进产业转型升级。
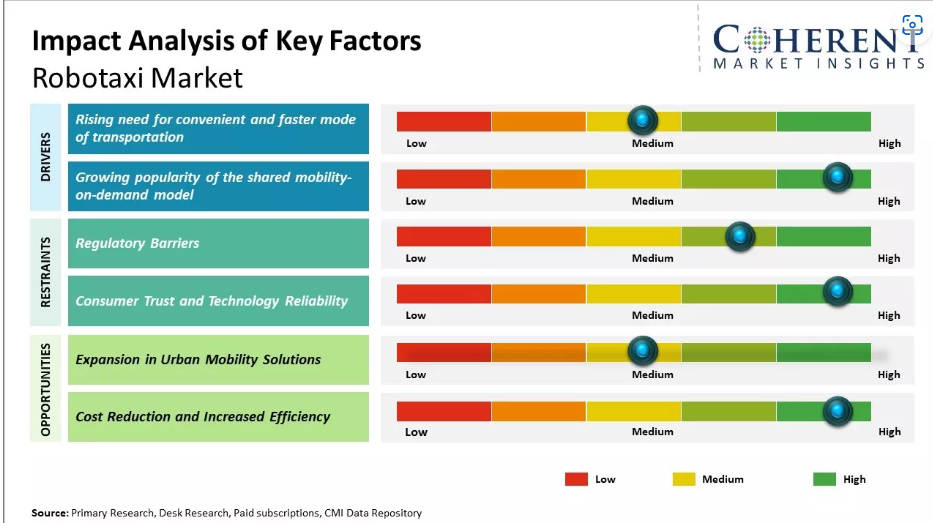
影响因素类别 | 影响因素 | 影响程度 | 解释 |
驱动因素 | 对便捷和更快速交通方式的需求不断上升 | 中 | 城市化进程加快,人们对便捷和快速交通方式的需求不断增加,机器人出租车可以满足这一需求,因此其市场驱动力很强。 |
驱动因素 | 共享出行按需模式的流行 | 高 | 共享出行的按需模式正在变得越来越流行,这为机器人出租车提供了一个良好的市场基础,推动其发展。 |
制约因素 | 监管障碍 | 中 | 尽管机器人出租车技术不断进步,但各国的法律法规对其推广和应用构成了障碍,需要克服这些监管障碍。 |
制约因素 | 消费者信任和技术可靠性 | 高 | 消费者对机器人出租车的信任度和技术的可靠性是影响其普及的重要因素。技术的成熟和消费者的信任需要逐步建立。 |
机遇 | 城市出行解决方案的扩展 | 中 | robotaxi可以作为城市出行解决方案的重要组成部分,为城市交通提供更多选择和灵活性,从而有很大的市场机遇。 |
机遇 | 成本降低和效率提高 | 高 | robotaxi能够通过自动化降低运营成本,并提高运输效率,这为其市场发展提供了巨大的机遇。 |
结 论
无人驾驶出租车在技术、法律、伦理和社会接受度等方面面临多重挑战。技术上,需要解决复杂场景下的感知与决策、系统可靠性和冗余设计问题;法律与伦理上,需要建立完善的法律框架、监管标准,并解决道德决策和责任归属问题;社会接受度方面,需要建立用户信任、提升服务质量,并应对传统出租车行业的冲击。随着技术的进步、法律法规的完善和社会的逐步接受,无人驾驶出租车有望克服这些挑战,成为未来智能交通的重要组成部分。
#08
8.1 主要国家与地区的进展
1、美国
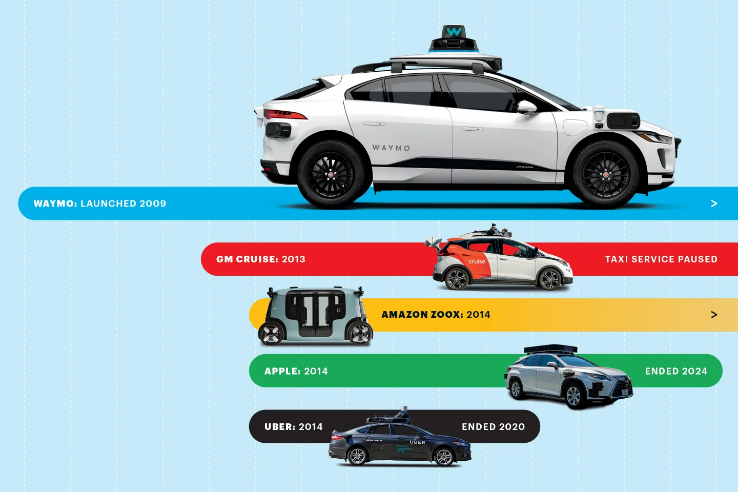
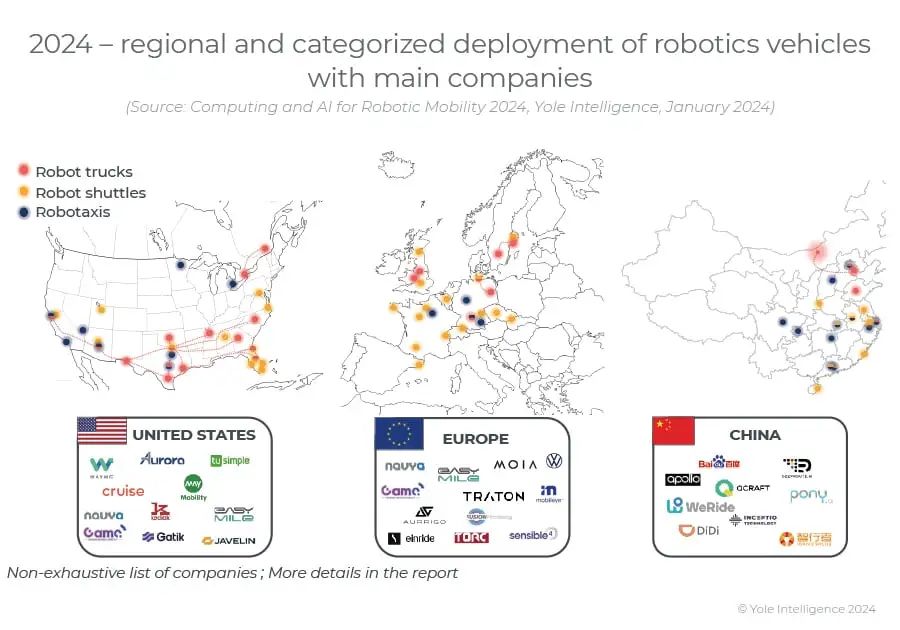
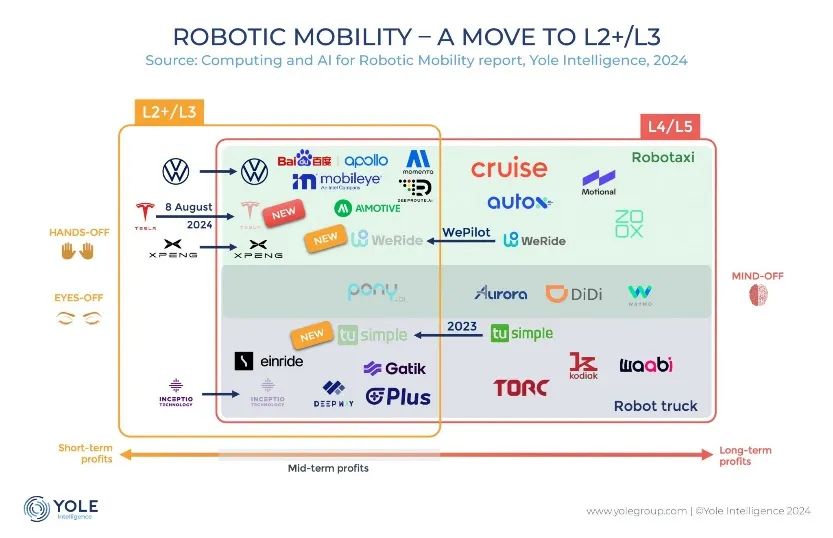
美国在无人驾驶出租车技术的发展和应用上处于全球领先地位。主要的无人驾驶技术公司包括Waymo和Cruise等,它们在多个城市开展了广泛的测试和试点项目。
Waymo:
发展历程:Waymo是谷歌母公司Alphabet旗下的自动驾驶技术公司,自2009年启动无人驾驶项目以来,已积累了超过2000万英里的公共道路测试里程。Waymo的无人驾驶出租车项目在凤凰城进行,已投入商业化运营。
示范项目:2018年,Waymo在凤凰城推出了全球首个商业化无人驾驶出租车服务,名为Waymo One,乘客可以通过App预约无人驾驶出租车。目前,Waymo One的服务范围和用户群体正在逐步扩大。

Cruise:
发展历程:Cruise是通用汽车旗下的自动驾驶技术公司,致力于开发全自动驾驶车辆。2016年,通用汽车收购Cruise,并加大投资力度推动其技术发展。
示范项目:Cruise在旧金山开展了广泛的测试和试点项目,并计划在2023年推出无人驾驶出租车服务。旧金山的复杂交通环境为Cruise提供了良好的测试和优化机会。

2、中国
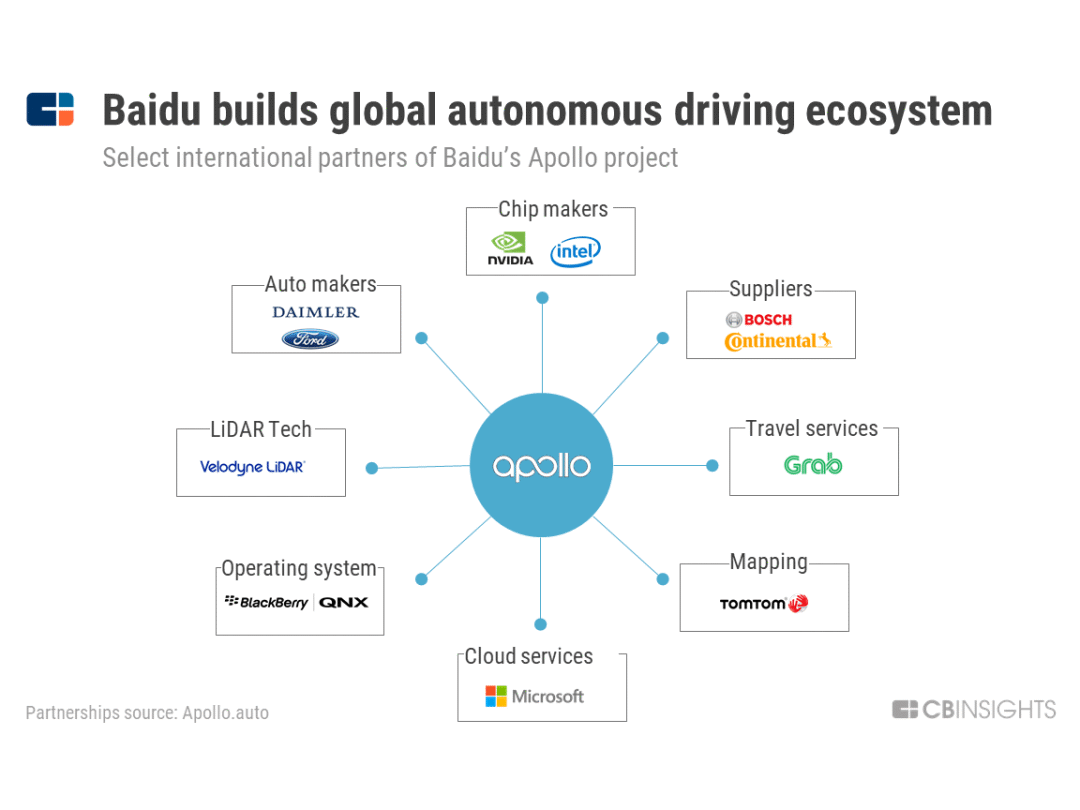
中国是无人驾驶技术的重要市场,拥有庞大的交通需求和良好的政策支持。主要的无人驾驶技术公司包括百度Apollo和AutoX等,它们在多个城市开展了试点项目和商业化运营。
百度Apollo:
发展历程:百度Apollo是百度旗下的自动驾驶技术平台,致力于构建开放、完整的自动驾驶生态系统。自2017年发布以来,Apollo已积累了大量的测试数据和合作伙伴。
示范项目:百度Apollo在北京、长沙、沧州等城市开展了无人驾驶出租车试点项目,提供公众体验和商业化服务。2021年,百度Apollo在北京推出了全球首个完全无人驾驶出租车服务Apollo Go,标志着技术和应用的重大突破。

AutoX:
发展历程:AutoX是中国领先的无人驾驶技术公司,成立于2016年,致力于实现全自动驾驶。AutoX的技术覆盖多种交通场景,包括城市道路、高速公路等。
示范项目:AutoX在深圳、上海、广州等城市开展了无人驾驶出租车试点项目,提供公众体验和商业化服务。2020年,AutoX在深圳推出了完全无人驾驶出租车服务,成为中国首个实现这一目标的公司。

3、欧洲
欧洲在无人驾驶技术的研发和应用上也取得了重要进展,主要国家包括德国、法国和英国等。欧洲的无人驾驶技术公司和传统汽车制造商积极参与研发和测试。
德国:
发展历程:德国是欧洲无人驾驶技术的重要国家,拥有强大的汽车制造业和技术研发能力。主要公司包括大众、戴姆勒和宝马等。
示范项目:德国的无人驾驶出租车项目主要集中在慕尼黑、汉堡和柏林等城市。2021年,大众在汉堡开展了无人驾驶出租车测试,计划在2025年实现商业化运营。

法国:
发展历程:法国在无人驾驶技术的研发和应用上也取得了显著进展,主要公司包括雷诺和PSA集团等。
示范项目:雷诺在巴黎开展了无人驾驶出租车试点项目,并计划在未来几年内实现商业化运营。PSA集团在里昂和波尔多等城市开展了无人驾驶测试和示范项目。

4、日本
日本在无人驾驶技术的研发和应用上具有重要地位,主要公司包括丰田、本田和日产等。日本政府和企业积极推动无人驾驶技术的发展,以应对老龄化社会和交通需求。
发展历程:日本的无人驾驶技术公司和传统汽车制造商积极参与研发和测试,重点发展城市道路和高速公路的自动驾驶技术。
示范项目:丰田在东京开展了无人驾驶出租车试点项目,计划在2020年东京奥运会期间提供无人驾驶出租车服务。日产在横滨和福冈等城市开展了无人驾驶测试和示范项目。

8.2 示范项目与试点城市
1、主要城市与试点项目案例
凤凰城(美国):Waymo在凤凰城开展的无人驾驶出租车服务是全球首个商业化运营项目,乘客可以通过Waymo One App预约无人驾驶出租车。Waymo在凤凰城积累了大量的测试数据和用户反馈,推动技术和服务的不断优化。
旧金山(美国):Cruise在旧金山开展了广泛的测试和试点项目,计划在2023年推出无人驾驶出租车服务。旧金山的复杂交通环境为Cruise提供了良好的测试和优化机会。
北京(中国):百度Apollo在北京开展了无人驾驶出租车试点项目,并推出了全球首个完全无人驾驶出租车服务Apollo Go。北京的试点项目覆盖了多个复杂交通场景,为技术验证和优化提供了丰富的数据和经验。
深圳(中国):AutoX在深圳推出了完全无人驾驶出租车服务,成为中国首个实现这一目标的公司。深圳的试点项目为AutoX提供了良好的测试和应用环境。
汉堡(德国):大众在汉堡开展了无人驾驶出租车测试,计划在2025年实现商业化运营。汉堡的试点项目为大众的无人驾驶技术发展提供了重要支持。
巴黎(法国):雷诺在巴黎开展了无人驾驶出租车试点项目,并计划在未来几年内实现商业化运营。巴黎的试点项目为雷诺的无人驾驶技术验证和应用提供了丰富的场景和数据。
结 论
全球无人驾驶出租车的发展在主要国家和地区都取得了显著进展,涵盖美国、中国、欧洲和日本等。各国通过试点项目和示范城市,积累了丰富的技术数据和运营经验,推动无人驾驶技术的不断完善和应用。随着技术的成熟和法律法规的完善,无人驾驶出租车有望在全球范围内实现大规模商业化运营,为人们的出行带来更多便利和创新。
#09
9.1 技术趋势
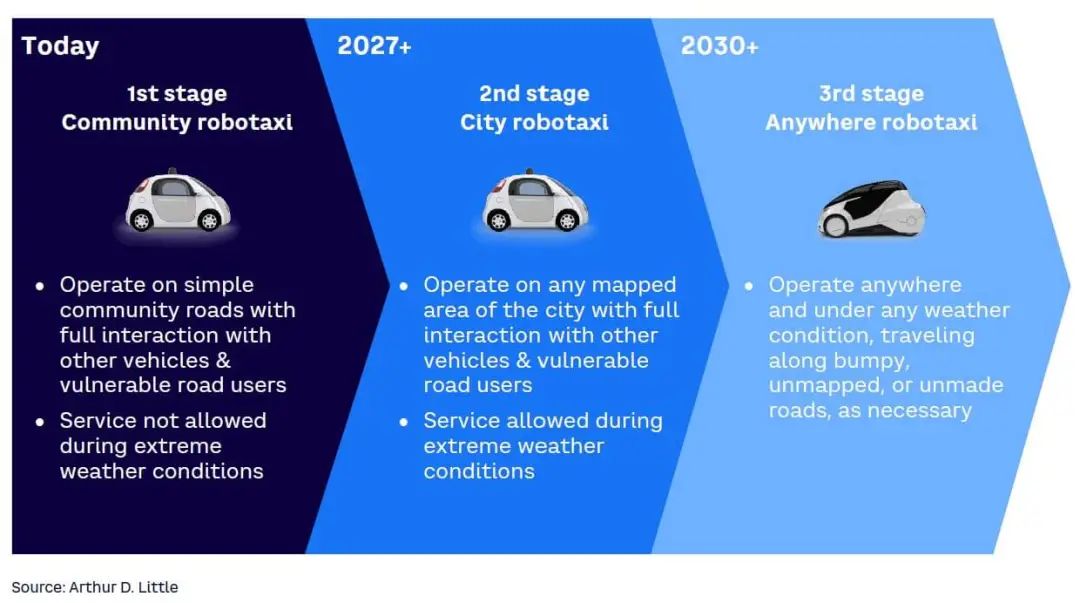
1、从L3到L5的演进
无人驾驶技术根据自动化程度划分为不同的级别,从L0(无自动化)到L5(完全自动化)。目前,许多无人驾驶出租车处于L3和L4级别,未来的目标是实现L5级别的完全自动驾驶。
L3级别(有条件自动化):L3级别的自动驾驶系统可以在特定条件下自动驾驶,但需要驾驶员随时准备接管。例如,百度Apollo的某些车辆已经实现了L3级别,可以在高速公路等特定场景中实现自动驾驶。
L4级别(高度自动化):L4级别的自动驾驶系统可以在大多数情况下实现自动驾驶,仅在极端环境下需要人类介入。例如,Waymo和Cruise的无人驾驶出租车项目已经接近L4级别,能够在特定城市区域内实现高度自动化驾驶。
L5级别(完全自动化):L5级别的自动驾驶系统可以在所有环境和条件下实现完全自动驾驶,无需人类干预。实现L5级别需要解决复杂的技术挑战,包括环境感知、决策控制和系统冗余等。
*注:特斯拉最近宣布推迟到24年10月发布robotaxi
2、人工智能与大数据的深度融合
高级感知与理解:无人驾驶出租车的核心技术之一是环境感知,这需要高精度的传感器和先进的人工智能算法。随着深度学习和计算机视觉技术的发展,无人驾驶系统将能够更好地理解和预测周围环境,提升安全性和可靠性。

大数据分析:无人驾驶车辆在行驶过程中会收集大量数据,包括道路状况、交通流量和用户行为等。这些数据可以用于优化算法、改进服务和提升运营效率。大数据分析还可以帮助无人驾驶系统适应不同的交通环境,提升整体性能。
自学习与适应:未来的无人驾驶系统将具备更强的自学习能力,能够通过不断积累的行驶数据和经验,自我优化和适应变化的环境。这种自适应能力将大幅提升无人驾驶出租车的安全性和用户体验。

9.2 市场前景
1、商业化路径与市场规模预测
试点项目与早期商业化:无人驾驶出租车的商业化路径通常从试点项目开始,通过在特定城市区域内提供服务,积累运营经验和用户反馈。这些早期商业化项目为技术验证和市场推广提供了重要支持。

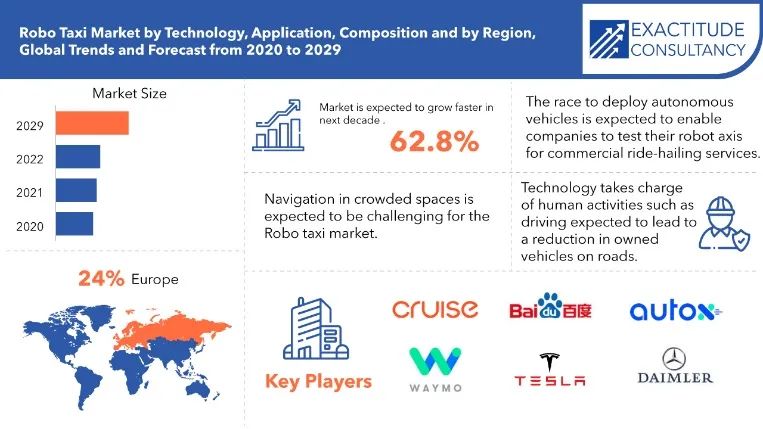
大规模部署:随着技术的成熟和法规的完善,无人驾驶出租车将在更多城市和区域内实现大规模部署。市场规模预测显示,到2030年,无人驾驶出租车市场将达到数千亿美元,成为智能交通的重要组成部分。

共享出行与多模式交通:无人驾驶出租车的普及将推动共享出行的发展,通过与公共交通、共享单车等多种交通模式的结合,提升整体出行效率和用户体验。未来的智能交通系统将更加多元化和灵活,为用户提供无缝的出行体验。

2、相关产业链的发展机会
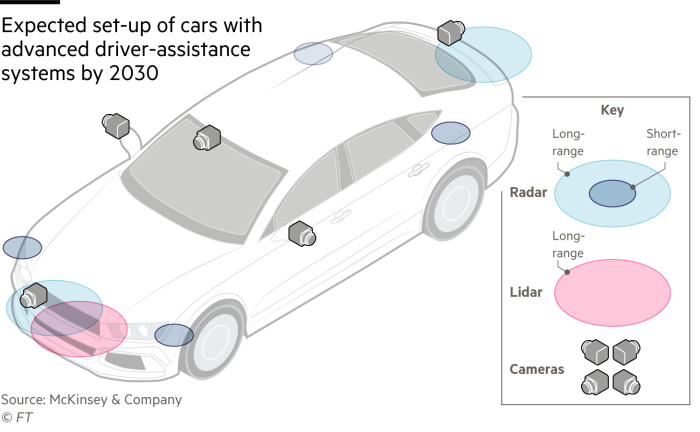
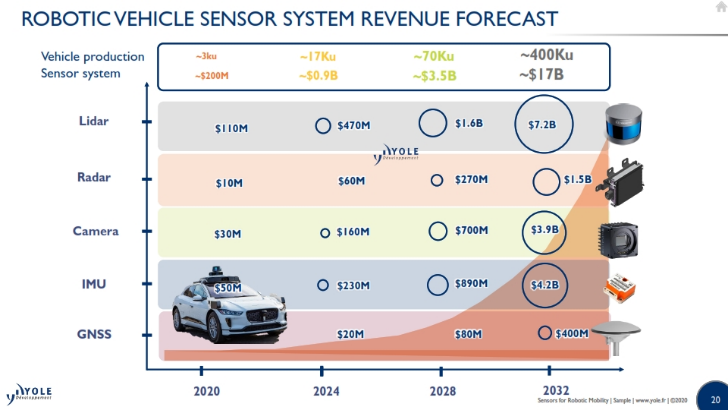
传感器与硬件:高精度的传感器(如LIDAR、摄像头和雷达)是无人驾驶系统的核心部件,市场需求将大幅增长。此外,车载计算平台和通信设备的需求也将显著增加,为相关硬件厂商带来发展机会。
软件与算法:无人驾驶系统依赖于复杂的软件和算法,包括感知、决策、控制和导航等。人工智能和大数据技术的进步将推动无人驾驶软件的发展,相关软件开发公司将迎来新的市场机遇。
基础设施与服务:无人驾驶出租车的普及需要完善的基础设施支持,包括充电站、车路协同系统和高精度地图等。相关服务提供商和基础设施建设公司将从中受益,推动产业链上下游的协同发展。
9.3 政策与法规
1、政策支持与监管框架
政策支持:各国政府对于无人驾驶技术的发展给予了高度重视,通过出台政策和提供资金支持,推动无人驾驶技术的研发和应用。例如,美国政府发布了《自动驾驶汽车政策指南》,中国政府发布了《智能网联汽车创新发展战略》,这些政策文件为无人驾驶技术的发展提供了重要指导和支持。
发布时间 | 法律法规名称 | 核心内容 |
2021年3月 | 道路交通安全法(修订建议) | 首次在法律上对具有自动驾驶功能的汽车进行道路测试,以及违法和事故责任分担等方面作出规定 |
2021年7月 | 智能网联汽车道路测试与示范应用管理规范(试行) | 进一步明确了道路测试、示范应用及测试区(场)的定义,提出了测试主体的单位性质、业务范围等要求 |
2021年8月 | 关于加强智能网联汽车生产企业及产品准入管理的意见 | 规定了自动驾驶汽车生产企业及产品的准入管理要求,为高级别自动驾驶产品量产提供准入依据 |
2021年10月 | 全国首个《无人化道路测试管理实施细则》 | 自动驾驶无人化道路测试分为“副驾有人”、“前排无人,后排有人”、“车外远程”三个阶段;已给百度、小马智行发放“车外远程”测试牌照 |
2022年4月 | 北京市智能网联汽车政策先行区乘用车无人化道路测试与示范应用管理实施细则(试行) | 采用“主驾无人、常规要配备安全员”的无人化载人模式,可进行商业化收费,也成为了国内首个开启乘用车无人化运营试点的城市 |
2022年8月 | 重庆市永川区智能网联汽车政策先行区道路测试与应用管理试行办法 | 允许获得通知书的示范应用主体开展车内无安全员的远程测试、示范和商业运营 |
2022年8月 | 自动驾驶汽车运输安全服务指南(试行)(征求意见稿) | 鼓励高级智能驾驶汽车产品在有限可控区域内从事商用化运营,并对自动驾驶商用化运营过程中自动驾驶车辆的人员要求、数据安全、车辆保险等关键问题做出了规定 |
2022年11月 | 关于开展智能网联汽车准入和上路通行试点的通知(征求意见稿) | 对通过准入试点的智能网联汽车产品,在试点城市的限定公共道路区域内开展上路通行试点 |
监管框架:无人驾驶出租车的商业化运营需要完善的法律和监管框架,包括测试与认证、数据隐私与安全、责任与保险等方面。政府和监管机构需要制定相应的法规和标准,确保无人驾驶车辆的安全性和可靠性。
商业模式 | 描述 | 代表案例 |
模式一 | 主机厂提供车辆,自动驾驶公司提供技术,出行服务商提供运营平台 | 上汽+Momenta+享道出行、广汽+文远知行+如祺出行 |
模式二 | 主机厂提供车辆,自动驾驶公司自主组建车队和运营团队 | - |
模式三 | 出行服务商自研L4系统,基于自有平台自主运营 | - |
2、国际合作与标准化趋势
国际合作:无人驾驶技术的发展需要国际合作,通过技术交流和经验分享,推动全球范围内的技术进步和应用。国际合作还可以促进跨国项目的实施,推动无人驾驶出租车在全球范围内的普及和应用。
标准化趋势:无人驾驶技术的标准化是实现大规模应用的重要前提。各国和国际组织正在积极制定无人驾驶技术的标准,包括通信协议、数据格式、安全规范等。标准化将推动无人驾驶技术的互操作性和兼容性,促进产业链的协同发展。

结 论
无人驾驶出租车的未来展望包括技术趋势、市场前景和政策法规等多个方面。在技术上,从L3到L5的演进、人工智能与大数据的深度融合将推动无人驾驶技术的不断成熟。在市场上,早期商业化项目和大规模部署将推动无人驾驶出租车市场的快速增长,相关产业链的发展机会也将显著增加。在政策法规上,各国政府的政策支持和完善的监管框架将为无人驾驶出租车的商业化运营提供保障,国际合作与标准化趋势将促进全球范围内的技术进步和应用。随着技术的不断进步和市场的逐步成熟,无人驾驶出租车将成为未来智能交通的重要组成部分,为人们的出行带来更多便利和创新。
#10
10.1 无人驾驶出租车的潜力
1、改变未来出行方式
无人驾驶出租车具有巨大的潜力,可以彻底改变人们的出行方式。通过自动驾驶技术,乘客可以享受更安全、更便捷、更高效的出行体验。无人驾驶出租车的普及将减少城市交通拥堵,缩短通勤时间,提高出行效率。

2、推动智慧城市建设
无人驾驶出租车是智慧城市建设的重要组成部分。通过与智能交通管理系统的互联互通,无人驾驶车辆能够实现优化路径规划、减少碳排放,并在紧急情况下提供快速响应。这些特性有助于提升城市的整体运行效率和居民的生活质量。
10.2 持续关注与期待
无人驾驶出租车技术的发展需要持续关注和期待。随着技术的进步和市场的成熟,无人驾驶出租车将逐步走向商业化和大规模应用。公众对于其安全性、可靠性和实际效用的认知和接受度也将逐步提升。
10.3 技术进步的动态
1、人工智能与感知技术
随着人工智能和深度学习技术的进步,无人驾驶车辆的环境感知能力将不断提升,从而实现更精准的行车决策和控制。传感器技术的进步(如LIDAR、摄像头、雷达)和数据处理能力的提升,也将推动无人驾驶出租车技术的进一步发展。
2、安全性与可靠性
无人驾驶出租车的商业化运营离不开对安全性和可靠性的持续改进。系统的冗余设计、紧急处理机制以及自动化驾驶算法的优化,将是未来技术发展的重要方向。

10.4 未来的机遇与挑战
1、机遇
市场潜力:无人驾驶出租车市场预计将迅速增长,成为智能交通领域的重要增长点。
技术创新:技术公司和汽车制造商在无人驾驶技术上的投入和创新将带来新的商业模式和市场机会。

社会效益:无人驾驶出租车的普及将显著改善城市交通效率、减少交通事故,并提升环境友好型。

2、挑战
法律法规:不同国家对无人驾驶出租车的法律和监管框架存在差异,需要制定统一的标准和规范。
技术难题:尽管技术不断进步,但在复杂的城市环境中实现安全可靠的自动驾驶仍面临挑战,如复杂交通情况和极端天气条件。
结 语
无人驾驶出租车作为智能交通的重要组成部分,具备显著的市场潜力和社会效益。随着技术的不断进步和市场的逐步成熟,无人驾驶出租车将在未来改变人们的出行方式,推动智慧城市建设,为社会带来更多便利和创新。然而,为了实现这一愿景,需要持续关注技术进步的动态,克服各种挑战,并制定有效的政策和法规,确保无人驾驶出租车的安全、可靠和可持续发展。
参考:
The Self-Driving Revolution: The Journey to V12 and Beyond | by Stephan Akrong | Jun, 2024 | Medium
Modules in an autonomous driving pipeline. | Download Scientific Diagram (researchgate.net)
Autonomous driving pipeline including both hardware and software that... | Download Scientific Diagram (researchgate.net)
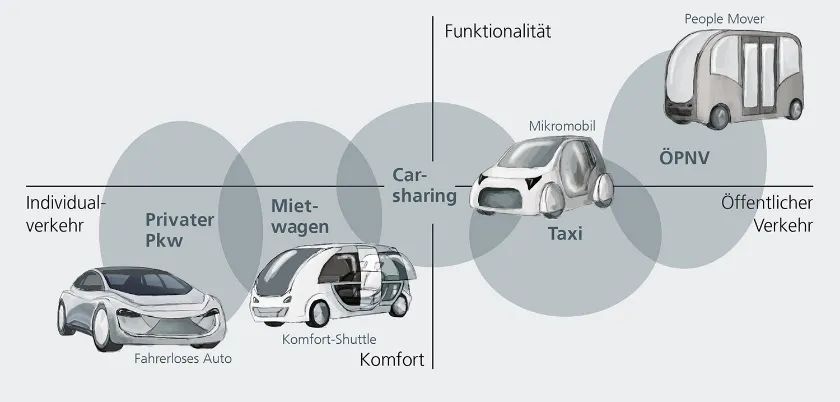
Robocabs: The mobility of the future? - Fraunhofer IAO
GM unveils autonomous Bolt EV without steering wheel or pedal, aims to bring it to market next year Electrek - Online Store (mscsalesar.pics)
(2) Connected Cars & Semi-Autonomous Vehicles & threats | LinkedIn
Autonomous mobility journal, edition IV | Arthur D. Little (adlittle.com)
Global and China L4 Autonomous Driving Industry Report, 2019-2020 - ResearchInChina
(2) Robotaxi Market worth $45.7 billion by 2030 | LinkedIn
Robotaxi Market - Companies, Size, Share & Research Analysis (coherentmarketinsights.com)
Robotaxis: 7 questions answered | Special-reports – Gulf News
China's Robotaxi Industry | NextBigFuture.com
Autonomous Vehicle Training Challenges for Law Enforcement - Domestic Preparedness
Tesla Robotaxi: A Glimpse into the Future of Transportation | by Fix Your Fin | Medium
Robotaxi Market Size, Share & Growth Forecasts, 2030 (psmarketresearch.com)
Robo Taxi Market 2022 Share, Growth, Trends & Forecast to 2029 (exactitudeconsultancy.com)
Robotaxi Market Size, Share, Analysis & Forecast 2030 (marketsandmarkets.com)
Waymo driverless cars: business story for outlasting competition | Fortune
智能驾驶系统-百度智能驾驶解决方案及汽车智能化产品-百度Apollo|Baidu阿波罗
“萝卜快跑”撞人上热搜,创新必然面临苛刻的审视_手机新浪网 (sina.cn)
An Automotive Value Chain In Flux (semiengineering.com)
Autonomous System for Ground Transport - MIT Technology Roadmapping
AVs, robotaxis and sensors studied | EVs & Beyond (evsandbeyond.co.nz)
RoboTaxis - Autonomous Ridehailing Services around the world - Mobility Innovators (mobility-innovators.com)
Collaboration is at the heart of Chinese autonomous driving services market (frost.com)
Autonomous Driving and Sensor Fusion SoCs - GSA - Global Semiconductor Alliance (gsaglobal.org)
Robotaxi Market Size, Share, Analysis & Forecast 2030 (marketsandmarkets.com)
Forget Tesla! These are the 10 top self-driving car companies and startups to watch in 2022 — TFN (techfundingnews.com)
Robotaxis - On the Road to Autonomy | Future Transport-News
盖世汽车研究院:Robotaxi于2025年可实现规模化运营 (icar101.com)
Image Sensors World: Yole on Automotive Sensing (image-sensors-world.blogspot.com)
Decoding the Dynamics of Processors in Robotaxis, Robot Shuttles and Robot Trucks from $14M in 2023 to $1B in 2034: Which Strategy Will Baidu-Apollo, Cruise, Waymo, and AutoX Adopt? - Edge AI and Vision Alliance (edge-ai-vision.com)
Renault to test Zoe robotaxis at Paris-Saclay campus | ADAS & Autonomous Vehicle International
Robotaxi商业化落地,遥遥无期-36氪 (36kr.com)
《自动驾驶汽车、无人驾驶出租车和传感器技术及市场-2023版》 (icar101.com)
体验中国5家头部公司的Robotaxi,自动驾驶出租车发展到哪一步了?_行业新闻 车讯-EV世纪 (21cnev.com)
无人驾驶出租车:新赛道上的城市竞争与产业变革_北京时间 (btime.com)
Robo-Taxi Market Size, Companies, Trends, Analysis, Share, CAGR (alliedmarketresearch.com)
Robotaxi Market Size, Share, Analysis & Forecast 2030 (marketsandmarkets.com)
/ END /
