


[摘要] 商用车转向系统的电控化是实现商用车节能化和智能化的必由之路,为此商用车转向系统从传统的液压助力转向系统发展到以电液耦合助力转向系统为代表的电控转向系统。本文将对商用车电控转向技术进行综述,从电控转向系统的典型构型、智能转向控制和功能安全设计3个方面对商用车电控转向技术的研究进行梳理,总结电控转向技术的重点研究领域和未来发展方向。梳理总结发现:(1) 在系统构型方面,商用车电控转向系统以电液耦合转向助力技术为主,着重于实现商用车智能转向功能,同时兼顾节能化需求;商用车电动助力转向系统是未来理想的电控转向技术方案。(2) 在智能控制方面,为了适应商用车智能化的发展,转向执行控制着重于解决液压系统所造成的非线性与时滞性问题以及轨迹跟随过程中的横向动力学控制难题;辅助驾驶功能着重于克服液压系统的非线性导致的转向力矩不连续以及人机控制权的分配;自动驾驶功能着重于提升安全性与燃油经济性。(3)在系统功能安全设计方面,商用车电控转向系统着重于设计符合功能安全标准的故障诊断与容错控制策略。
前言
近年来,随着汽车技术、电力电子技术、控制理论、通讯及网络技术等的不断发展,智能汽车已经成为全球汽车产业发展的战略方向。在“碳中和”、智能交通、智慧公路等社会背景下,国家发展改革委等11部门联合印发的《智能汽车创新发展战略》中明确提出,要加强智能汽车技术研发和产业布局,推动智能汽车产业化进程[1]。同时,国务院也印发了《“十四五”节能减排综合工作方案》,提出了大力发展智能交通、扎实推进节能减排的目标[2]。在此大背景下,商用车的发展将聚焦于其智能化与节能化;商用车转向系统作为整车横向运动的主要执行机构是车辆横向智能化重要载体,要达到此目标须以其高度电控化为基础。
在过去数十年间,商用车广泛采用液压助力转向(hydraulic power steering,HPS)系统,该系统助力大、结构简单、成本低,然而系统助力特性在出厂时便已固定,难以兼顾汽车低速行驶(或原地)转向时的轻便性和高速行驶转向时车辆的稳定性。此外,在能耗方面,HPS 将消耗商用车整车约3% 的燃油[3],而在高速下这一数字最高可达到8%[4]。HPS转向油泵由发动机驱动,而新能源商用车可能没有发动机,如纯电动和燃料电池大客车,因此用电动泵来代替发动机给液压系统供能,即采用电动液压助力转向 (electro-hydraulic power steering, EHPS) 系统[5],该系统能够对液压助力进行控制,在增强路感及降低能耗方面取得显著效果[6-7]。然而,随着商用车对智能驾驶等转向功能的需求日益迫切,EHPS由于无法主动介入转向控制已经难以满足需求,因此,国内外对能够实施主动转向干预控制的商用车电控转向系统进行了大量创新性的研究工作,提出了不同的系统构型以及丰富的智能转向控制策略等,极大地推动了商用车智能化发展。
本文将综述近期国内外学者在商用车电控转向系统构型、智能转向控制技术(主要包括转向执行控制策略、横向动力学控制及智能驾驶控制)和功能安全设计及容错控制策略等方面的研究成果,在此基础上,进一步总结商用车电控转向系统所面临的主要挑战和未来的发展方向。
1 商用车电控转向系统构型
伴随着商用车电动化、智能化、网联化的不断发展,商用车转向系统必须提供更为丰富的转向功能,如智能驾驶,而可提供主动转向干预即智能转向功能的电控转向系统构型是最基础的工作,本节将对商用车电控转向系统的主流构型进行梳理。
1. 1 电液耦合助力转向系统 (electro-hydrauliccoupling power steering,EHCPS)
EHCPS 系统本质上是在HPS 系统的转向器输入端集成一套EPS (electric power steering) 电机系统,该系统主要由传感器单元、电机、控制单元和蜗轮蜗杆减速器组成。该系统不仅可通过转向电机控制实现电机助力与液压助力的复合助力为转向路感提供更广的设计区间,更可以通过电机控制实现主动转向介入从而满足智能转向的需求。目前,搭载着EHCPS系统的智能商用车已经在结构型高速公路、矿区、港口等封闭场景内应用,显著降低运营成本、提高运营效率以及安全性[8]。
根据EHCPS所集成电机系统的位置不同,产生了不同的构型。采埃孚公司设计的ReAX-ColumnMounted 系统[9]把电机系统集成在转向盘管柱处,如图1所示。该结构类似于乘用车的C-EPS构型,在对转向系统的改动较小的条件下实现了对转向器输入力矩的控制,但该系统的力矩输入能力有限,主要适用于中小型商用车。

采埃孚公司设计的ReAX Gear Mounted系统[10]和博世设计的ServoTwin 系统[11]( 见图2) 将电机系统集成在转向器的输入轴,类似于乘用车的P-EPS构型。

在智能化方面,EHCPS系统可以通过电机控制算法的设计,为转向路感设计提供了更大的自由度以改善驾驶员转向路感,并可以控制电机主动进行转向介入从而实现智能转向功能,因此不仅克服了商用车HPS系统所固有的转向沉重、中位不敏感、回正性差等问题[12],还能够独立于驾驶员意图进行转向动作,为商用车转向智能化提供了基础。
在节能化方面,EHCPS系统在叠加的电动助力协助下,液压助力额定流量可以适当降低以减少油泵总成的溢流损失、转阀的节流损失以及管道的沿程损失,流量降低所导致的转阀输入扭矩的增加将由电动助力加以补偿,因而EHCPS系统相比于HPS系统能够在保证转向轻便性的同时,也具有能耗低的优势,因此在传统内燃机商用车上得到了很好的应用。
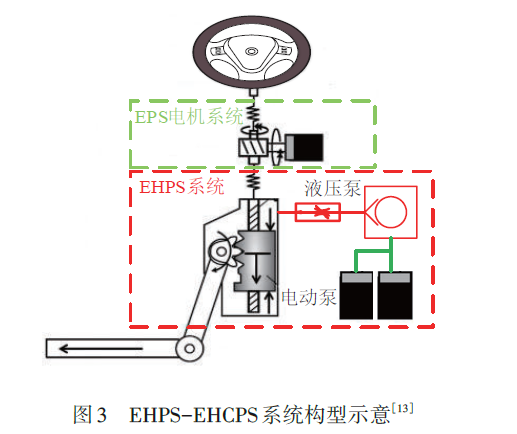
为进一步降低转向能耗,可以将EHPS 与EHCPS相结合,通过在不同工况下合理分配电动助力与液压助力的占比,使得转向系统既能够实现主动转向又能够明显降低系统能耗。由EHPS 和EHCPS构成的复合转向系统( EHPS-EHCPS系统),其基本构型如图3所示。该复合构型中,电动油泵作为液压子系统的动力源,代替了发动机驱动的转向油泵,该部分结构与EHPS系统类似[13]。
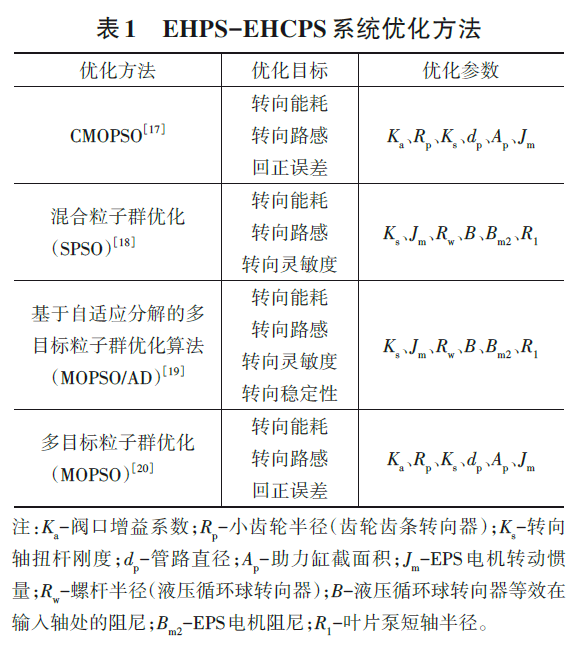
文献[14]和文献[15]中对EHPS-EHCPS 系统进行了多工况下的能耗测试,结果证明了相比HPS系统节能50%,整车燃油经济性提升1% ,而文献[16]中通过使用蓄能器和电磁阀改进了EHPS的液压回路,使液压助力由流量控制变为压力控制,从而实现了全电动助力和电液耦合助力两种模式,进一步降低能耗,其能耗相对于EHPS系统降低了83%。此外对EHPS-EHCPS 系统中的关键参数进行优化能够有效改善系统性能并且降低系统能耗。文献[17]~文献[20]中基于多目标粒子群优化方法,对EHPS-EHCPS系统的关键设计参数进行优化,提升了转向助力性能,降低了转向能耗。上述文献所涉及的具体优化方法、优化目标、优化参数如表1所示。
EHPS-EHCPS系统构型同时保留了EHPS系统与EHCPS系统的优势,既能通过助力电机与液压系统的协同控制实现主动转向功能,又能通过对电动泵的控制根据行驶工况调节液压助力来降低能耗,使得商用车转向系统所面临的智能化与节能化两大问题有了统一的解决方案。然而系统复杂度的提升带来了成本的增加,特别是对传统内燃机商用车而言需要额外增加电动油泵部件,因此常用于新能源商用车上,这是因为多数新能源商用车自身已经具备了EHPS系统基础,仅需要增加EHCPS中的电机系统。
1. 2 商用车电动助力转向系统 (commercial vehi⁃cles electric power steering,CV-EPS)
目前,EPS已经在乘用车上逐步普及,但还未能在商用车上广泛应用,这是由于EPS系统限制了转向系统所输出的转向力,不能适配商用车大转向力的需求。为此须设计适合商用车的电动助力转向系统,即CV-EPS。CV-EPS 摒除了液压系统,结构简单,可以有效提高系统响应的准确性及速度,以电机作为转向系统的动力源,可以实现智能转向功能,并且电机助力更直接,无需传统的液压系统提供助力,因此相比于HPS系统其能量效率显著提高。
对中、小型商用车而言,CV-EPS可以通过在乘用车EPS的基础上,进一步提高转向电机的功率以及齿轮齿条结构所能承受的最大转矩来实现。如耐世特公司提出的HO EPS系统,最高可输出24 kN的齿条力[21]。这种方案的优势在于可直接移植乘用车已经成熟的结构方案,开发难度低,缺点在于齿轮齿条结构存在强度上限,目前很难应用在大型商用车上。
而大型商用车的CV-EPS 还须解决两方面难题:(1) 当前商用车普遍应用的24 V低压电源系统所能提供的功率有限,难以覆盖商用车转向全工况;(2)现有转向传动机构难以承载商用车转向所需的最大转矩。
基于前述CV-EPS 的显著优势及应用的必要性,CV-EPS必将作为商用车转向执行器的下一代解决方案,已有研究对CV-EPS进行了尝试探索,以期解决前述两个问题。
基于48 V车载电源系统设计的CV-EPS系统可以有效解决功率不足方面的问题。如采埃孚公司研发了一款基于48 V 系统的CV-EPS 样机ReAXEPS[22](见图4),其结构包括集成控制器、减速器、传感器以及一台转矩可达70 N‧m的高转矩电机,可装配重型商用车。

此外,随着商用车电动化的逐渐覆盖,驱动系统的高压电源理论上可以直接用于转向系统,同样可以解决目前内燃机商用车转向功率不足的问题,然而由于转向系统与人长时间密切接触,故从安全角度考虑,还鲜有采用高压电机的转向系统应用。
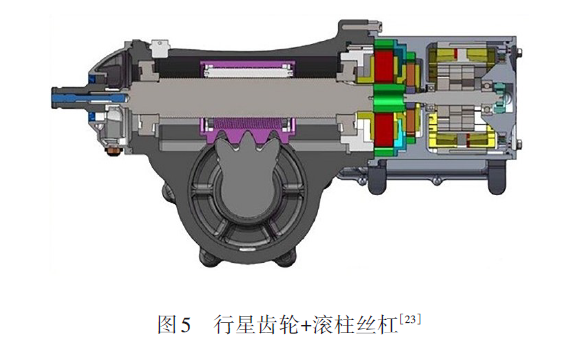
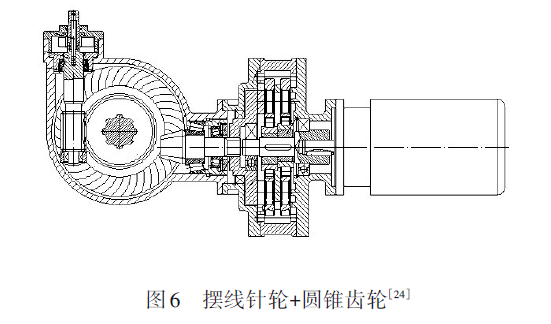
在传动结构设计方面,天津松正公司提出了一种行星齿轮与滚柱丝杠的设计方案[23](见图5),在传统的循环球式转向器输入轴上加装一套行星齿轮与滚柱丝杠配合的高承载能力、大减速比的减速机构,可以承载较大转矩,但减速机构与转向器连接处较为薄弱,容易脱落。温岭东菱公司提出了一种摆线针轮与圆锥齿轮的设计方案[24](见图6),该机构传动效率高、能提供较大转矩输出,但它采用了摆线针轮和圆锥齿轮两套减速机构,机械结构复杂、整体机构体积较大。
CV-EPS 的产品化还需要较长时间的研究验证,目前的CV-EPS方案中,48 V系统对整车结构的改动太大,较难实现,而依然采用24 V系统则须设计小体积、大功率的低压电机;现有的减速器设计方案存在内摩擦大、连接强度不足以及使用寿命不能保证等工程问题,因此要对其机械结构进一步优化。
2 商用车智能转向控制
随着市场对商用车智能化需求日益迫切,不能提供主动转向功能的电控转向系统已经难以满足用户需求,而CV-EPS 系统在短期内无法实际应用。因此,前述EHCPS构型在CV-EPS技术成熟前的过渡期内成为最为可行的商用车智能转向系统方案,主要表现在通过对助力电机控制策略的设计,既能够实现随速助力、应急转向、主动回正、侧风补偿等主动转向功能,又能够为上层高级辅助驾驶系统提供必要的控制接口[25]。
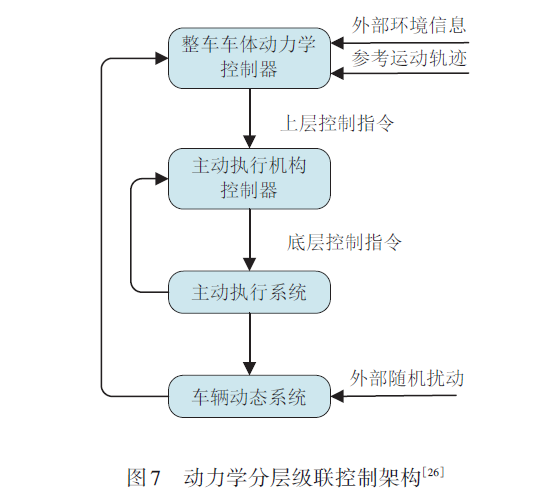
转向系统是商用车实现智能控制的主要执行机构,在典型的车辆底盘动力学分层级联控制架构下[26],控制框图如图7所示,执行机构控制器接收上层横向动力学控制器发送的期望前轮转角指令,产生底层控制指令,驱动转向执行机构动作,跟踪期望转角,实现车辆横向姿态的调整。因此,转向执行器的控制性能是衡量商用车智能化的关键因素。
以EHCPS为基础的商用车智能转向控制面临以下2个层面的问题:(1) 该系统为典型的机-电-液耦合的复杂系统,使得车轮转角、转矩精确伺服控制策略的设计面临极大挑战;(2)商用车辅助驾驶中的人机协同所造成的人机控制权分配问题以及自动驾驶中的节能性和安全性问题。
根据车辆动力学分层级联控制架构,可以将商用车转向控制执行分为2个层次:上层控制策略进行车辆动力学控制,以计算期望的前轮转角;下层转向执行控制策略用以实现上层期望前轮转角的跟踪。相比于乘用车EPS系统,商用车EHCPS系统在下层控制器还须考虑补偿转向系统中液压系统造成的非线性和高时滞性[27];上层控制器设计中还须考虑车辆侧翻加速度阈值较低、车辆转向时的侧倾风险,以及商用车整车参数的不确定性和外部不确定干扰造成的横向动力学响应的非线性[28]。
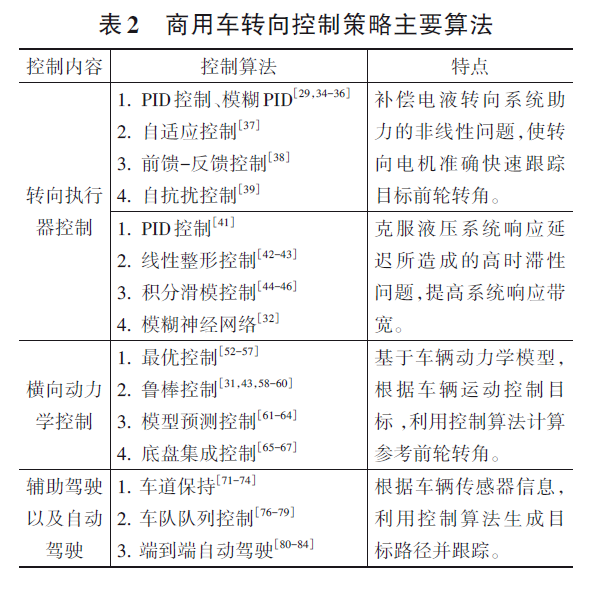
根据商用车EHCPS系统的控制特点总结的商用车智能转向控制中的主要控制内容和常见方法如表2所示。下面将围绕表2中内容具体展开。
2. 1 转向执行器控制
基于EHCPS的商用车智能转向系统是典型的机-电-液耦合的复杂系统,主动转向介入时转向电机产生使HPS扭杆变形的驱动力,进而转阀相对转动促使液压缸活塞两端产生压差形成液压助力,电机驱动力再与液压驱动力一同克服车轮地面转向阻力矩实现车轮偏转。由于主动转向时液压助力系统本身扭杆的存在,在传递力矩的过程中会产生形变,导致估测的车轮转角存在偏差,须在下层执行机构控制器设计中补偿EHCPS系统的扭杆变形角,才能实现转向执行过程中的转角精确跟踪。
考虑到扭杆变形角与转向阻力矩之间存在强-相关性,文献[29]中设计滑模观测器观测转向阻力矩,从而通过标定查表的方法补偿扭杆变形角;文献[30]和文献[31]中通过对转向阻力矩成分的理论分析,获得了在对应车速和转向盘转角条件下的转向阻力矩,但是这种方法在商用车装载质量大范围变化时会有鲁棒性差的问题;文献[32]中提出了一种基于模糊神经网络辨识器的扭杆变形角估计策略,该策略通过神经网络辨识EHCPS系统的非线性模型,从而获得扭杆变形角的估计值。
在为底盘域所实现的高级驾驶功能提供所需的前轮转角跟踪控制时,还存在液压系统液压阀开关溢流所造成的非线性问题,转向电机控制策略的制定需要在深入分析电机力矩与液压助力耦合关系的基础上明确电机力矩同液压转向器输出转角之间的映射关系[33]。为了克服电液转向系统中液压系统造成的非线性问题,国内外学者做了大量的研究,文献[34]和文献[35]中利用PI控制器控制转向电机的电流,跟踪外部控制回路产生的所需转向转矩,完成转向动作;文献[29]中通过模糊PID控制根据系统运行状态调整参数,补偿不同状态下液压助力的不连续,实现对目标转角的良好跟踪;文献[36]中又考虑到路面附着系数的变化,设计模糊PID参数;文献[37]中设计自适应控制器,用来提升负载变化下的电液耦合转向系统鲁棒性。文献[38]中通过分析转向阻力与液压助力之间的映射关系得到所需的转向盘角度,采用前馈-反馈控制跟随目标转角;文献[39]中对转向盘转矩进行自抗扰跟踪控制,利用自抗扰控制算法的优越性来克服转向系统内部非线性。
此外,在下层控制器设计中还须考虑如何克服EHCPS系统液压系统响应延迟所带来的高时滞性问题,并提高EHCPS系统的角度闭环响应带宽,使其达到整车横向动力学响应带宽的3~5倍[40]。
在这方面,国内外学者多种解决方案,文献[41] 中根据转角跟踪误差与液压阀开关频率设计PID控制控制参数;文献[39]中 设计的非线性误差反馈器在线性 PID 基础之上对误差进行非线性组合,得到更高的反馈效率,提高算法控制效果。
线性整形控制可以有效降低在一定频率带宽内目标前轮转角的跟踪延迟,文献[42]中分析了系统模型的动态特性和开环频率测试的结果,采用环整形控制策略,实验结果表明,在时域和频域中,前轮跟随转向盘无明显延迟,频率约为车辆横向动力学带宽的5倍;文献[43]中补偿了系统在中频段内的响应滞后和提高了系统在中频段内的相位裕度,进而提高了系统对外部随机扰动和内部参数不确定的鲁棒性。
积分滑模控制可以平滑地跟踪重型车辆转向系统中的指令信号,但积分滑模控制固有的抖振现象严重影响其控制性能[44]。文献[45]中提出了一种改进的积分滑模控制,控制器中集成了一个双曲正切函数,以减轻滑模引起的颤振,实验结果表明,积分滑模控制的跟踪误差保持在0. 5°以内,明显优于PID控制;文献[46]中针对复杂系统提出一种自适应模糊-径向基函数神经网络-积分滑模控制方法,改进后的控制器不再需要重型车辆电液助力转向系统的精确数学模型,实现了参数的持续自适应更新。
此外,近年来兴起的模糊神经网络控制[32]也可以将EHCPS的响应带宽提升至5 Hz。
目前商用车转向执行控制的研究主要聚焦于补偿液压系统所固有的非线性及时滞性问题,以达到快速、准确地跟踪目标前轮转角。随着商用车智能化的快速发展,自动驾驶时代即将到来,对转向执行算法在高响应带、短调节时间和小稳态误差等方面提出了更高的要求,相关问题仍须进一步研究。
2. 2 横向动力学控制
商用车在高速行驶过程中,由于质心位置较高导致车辆侧翻加速度阈值较低,使得车辆转向时存在较大的侧倾风险[47]。因此,商用车轨迹跟踪过程中的横向动力学控制问题显著,一方面在于行驶车速与车体横摆响应的强非线性耦合,整车参数和外部扰动的不确定性较强等[48],另一方面横向轨迹跟随控制策略的设计须兼顾轨迹跟随精度[49]、车辆动力学稳定性[50]、转向控制平滑性[51]等多种控制目标。上述问题使得商用车采用主动转向进行横向控制策略的设计面临诸多挑战,国内外学者对此做出了大量的研究。
优化算法在商用车横向轨迹跟随控制中用于车辆横摆稳定性控制,文献[52]和文献[53]中设计了线性二次型调节器(linear quadratic regulator,LQR),用于解决电液执行系统非所固有的非线性带来的参数摄动;文献[54]中在LQR控制器的基础上增加了积分反馈输出,能够在成功跟踪期望横摆角速度的情况下,使得质心侧偏角明显减小。文献[55]中利用线性二次高斯( linear quadratic Gaussian,LQG)结合卡尔曼滤波算法设计控制器,用来提升车辆横摆稳定性;文献[56]和文献[57]中考虑了未建模的动力学、非线性、干扰和测量噪声对控制系统性能的影响,进行LQG控制器设计。
针对商用车EHCPS参数和外部扰动的不确定性较强的问题,国内外许多学者设计了鲁棒控制器来应对此类问题,文献[58]和文献[59]中基于交互式鲁棒控制理论设计车辆横向路径跟踪控制策略,能够在车辆受到外界扰动时保证路径跟踪精度;文献[31]中采用H2/H∞结合的控制策略以平衡路径跟踪精度以及车辆的横摆稳定性;文献[60]中采用线性变参数(linear parameter-varying,LPV)增益调度控制策略,通过引入各种频域加权函数,明确地均衡各种控制目标,以应对时变的行驶速度,而文献[43]中在LPV控制策略的基础上进一步改进了多胞体范围以提升车辆的横向稳定性。
在商用车轨迹跟踪领域中,模型预测控制(model predictive control, MPC)可以较好地处理多变量、非线性系统,对复杂系统有很好的控制效果,且具有较强的鲁棒性。文献[61]和文献[62]中分别针对电液转向系统和双电机转向系统设计了MPC控制器,根据车辆信息实时计算最佳前轮转角,系统跟随目标转角实现轨迹跟踪;文献[63]中考虑时变车速以及路面附着系数的影响,采用MPC方法设计自动驾驶商用车轨迹跟随控制策略;考虑到模型的线性化会使得MPC预测出现误差,文献[64]中基于非线性滚动时域观测器和非线性模型预测控制(NMPC)设计轨迹跟踪控制策略,实验结果表明该方法相较于传统MPC控制循迹精度更高。
高级别自动驾驶功能对商用车底盘域各子系统的集成控制提出了较高的要求,文献[65]中研究了商用车底盘域中的各个子系统控制之间的联系,通过设计控制分配策略来提升控制安全性;为了消解车辆底盘域子系统之间的耦合效应,文献[66]中提出一种基于小波神经网络的底盘一体化控制策略,实现车辆主动后轮解耦控制和直接偏航力矩控制;文献[67]中利用递归最小二乘估计对车辆质量进行估计,在转向和制动联合防侧翻控制中考虑了质量效应。
综上所述,国内外相关学者针对商用车横向动力学领域所面临的非线性、不确定性和外部扰动随机性等问题提出了一系列控制策略,并取得了丰硕的研究成果。然而,商用车在轨迹跟随过程中并非面临单一问题,在多目标协同控制领域研究较少。
此外,乘用车基于线控转向的底盘域集成控制研究日渐成熟,而商用车领域的底盘域集成控制研究仍有不足。
2. 3 辅助驾驶与自动驾驶
目前,由于有关自动驾驶的法律法规并不完善、相关算法安全程度不足等原因,乘用车自动驾驶算法难以在城市道路上应用。与乘用车大多在城市道路上行驶不同,相当一部分商用车在封闭无人且路径固定的工况下行驶,如矿区、码头货运、仓库存储、结构化高速公路等。在上述相对或简单、或封闭的场景下,商用车高级辅助驾驶和自动驾驶将更容易落地[68]。
得益于辅助驾驶功能的应用,商用车所造成的碰撞事故在过去数年间显著减少[69],目前国内外的研究仍聚焦于L2 级别功能,如车道保持(lanekeeping assist,LKA)、自适应巡航、车道偏离预警等,这些功能均有助于减少因驾驶员分心造成的车辆碰撞事故[70]。
与乘用车不同,商用车EHCPS构型中由于液压子系统所固有的非线性及时滞性,使得执行器存在响应不及时和转向盘力矩不连续等问题,文献[71]中将自抗扰控制得到的目标转矩和人机在环的MPC计算目标转向盘转角进行叠加,设计了LKA控制策略,由此克服转向系统内部参数摄动等不确定因素的影响;文献[72]中采用变权重多点预测控制器来抑制LKA控制中电液复合转向系统的非线性和干扰问题;文献[73]中在建立电液转向系统模型的基础上,考虑驾驶员驾驶特性设计了LKA控制策略。
针对商用车辅助驾驶中人机协同所造成的人机控制权分配问题,文献[71]中研究了LKA系统对驾驶人的干预问题,引入干预系数的概念,在保证安全行驶的前提下减小对驾驶员的干预;文献[74]中解决了LKA策略中助力纠偏模式与驾驶员模式之间切换时的冲突问题。文献[75]中采用自适应MPC,将驾驶员认知、肌肉力学模型与预测模型相结合,对控制权限的动态分配,减少了人车冲突,同时还提高了路径跟踪性能。
在商用车辅助驾驶领域,由于液压系统造成的转向盘力矩不连续,并且未考虑驾驶员驾驶特性,导致人机体验较差;同时,人机冲突问题依然显著,如何保证驾驶员在受到其他系统或其他车辆造成的强烈干扰后对辅助驾驶系统出现不信任的问题需要解决。
在商用车自动驾驶领域,货车队列行驶的控制今年来研究的热点,即其中一辆手动驾驶的货车(领头货车)后面跟随多辆自动驾驶的货车,文献[76]中针对队列形成和修改问题,提出了一种基于共识算法的货车队列协同方法,实现货车实时交换有关其当前状态的信息,并根据实时信息调整队列顺序和跟车距离;文献[77]中对给定路线的队列控制节油问题进行了研究;文献[78]中在考虑节油的同时进一步研究了车队行驶的速度规划和跟踪控制问题;文献[79]中考虑了异构车辆的车队控制,即非同类型车辆的队列行驶控制。
商用车队列通常行驶在结构化高速公路上,路况较为简单,存在其它商用车或乘用车与车队产生交互,针对车队与其它车辆的交互问题须进一步研究。
在矿区、码头等封闭场景中,商用车的自动驾驶有很大的应用空间,文献[80]~文献[82]中研究了矿区的自动驾驶,保证矿用货车在不同场景下都能高精度行驶到目的地;文献[83]~文献[84]中研究了港口场景下商用车的自动驾驶。
3 功能安全需求及容错控制策略
3. 1 功能安全需求
汽车从最开始的机械系统发展到现在的电子电气与机械结合的复杂系统,安全性和可靠性一直都是行业内关注的重点。随着电子电气技术的发展,汽车转向系统复杂度不断提高,来自系统失效和随机硬件失效的风险也日益增加[85]。
为应对上述挑战,定义汽车行业功能安全的ISO 26262[ 86]标准应运而生,通过消除不合理的设计风险或改善机械故障的失效措施来保证整体系统的安全,即发生故障时的运行没有不合理的风险。
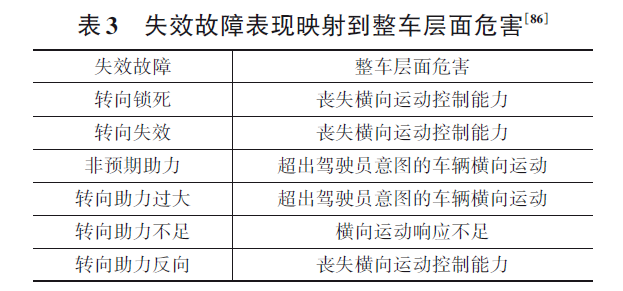
对于商用车转向系统而言,车辆层面的危害常包括未按照或超出驾驶员意图的车辆横向运动、横向运动响应不足和丧失横向运动控制能力3类[87]。根据上述3类危害提出转向系统对应的3种功能安全目标,即防止违背驾驶员意图的自动转向、提供正确的转向助力,保持转向控制能力[88]。系统级别故障一般有以下6种,即转向锁死、转向失效、非预期助力、转向助力过大、转向助力不足、转向助力反向。故障表现与整车层面危害对应如表3所示。
根据ISO 26262标准所给出的系统功能安全设计及管理流程,对商用车转向系统进行功能安全危害分析、风险评估,确定转向系统的安全目标,依据安全目标进行安全分析并制定相应的故障诊断与容错控制策略,以保证在系统部件(如,传感器、执行器或控制器) 发生故障时系统失效风险在可接受范围内。
3. 2 故障诊断方法
商用车转向系统故障主要包括执行器故障、传感器故障、通信故障等[89],常用的故障诊断方法总结如图8所示。
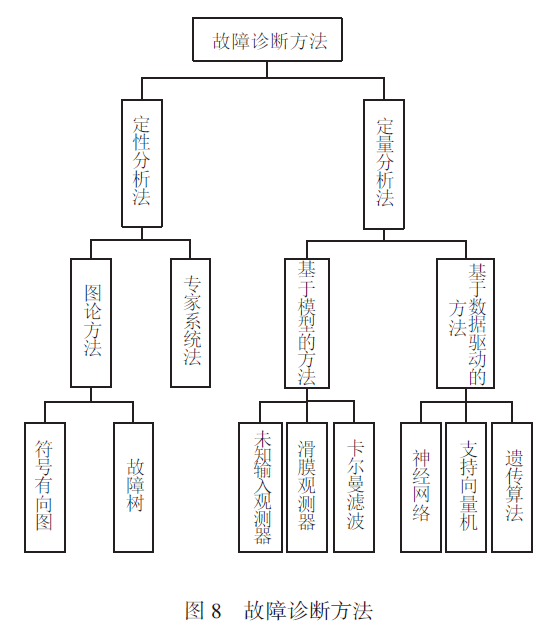
定性的诊断方法主要由硬件自检完成的诊断,如过压、欠压、通讯中断、CAN总线短路等故障,随后根据工程经验构建诊断逻辑对系统故障做出定性的判断。
定量分析方法包括基于数据驱动的检测方法[92]和基于模型的检测方法[93]。基于数据驱动的故障检测方法以算力驱动,依靠大量的故障数据对当前的系统状态进行诊断,如神经网络[94]、深度学习[95]等,能够快速准确地进行故障诊断及定位,但该方法在在其数据有较大的噪声时,诊断的置信度将大打折扣。
基于模型的故障诊断算法需要对系统的物理模型或数学模型深入理解,利用构建的系统模型和可测量信息,设计观测器或滤波器,基于观测的输出与系统的实际输出计算残差,再对残差进行分析来进行故障诊断与故障定位,常见的系统状态观测器包括:龙伯格观测器[96]、 滑模观测器[97]、 鲁棒观测器[98]等。
在实际工程应用中,时常采用简单的定性分析结合基于模型的故障诊断方法来综合诊断系统故障并进行故障定位[91]。
3. 3 容错控制策略
商用车转向系统容错控制主要针对传感器和执行器两类器件,传感器的故障一般是指由传感器硬件受损、老化等原因而引起的测量值失准现象[99] ;转向执行器作为商用车转向系统的终端器件,其频繁操作导致的磨损以及环境腐蚀等机械损伤可能会造成系统参数摄动,使得系统指令与执行动作之间出现非预期的偏差[100]。
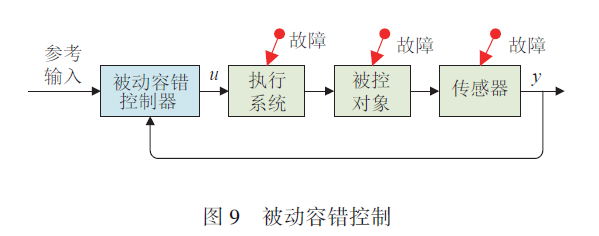
容错控制主要方法一般分为两种,即主动容错控制和被动容错控制。被动容错控制主要针对已知可能发生的故障,设计高鲁棒性的容错控制策略,使得系统对特定的故障不敏感,从而保持系统的稳定,经典控制框图如图9所示。
文献[101]和文献[102]中对转向电机进行备份冗余,系统在故障状态下由单电机驱动降级运行;文献[103]中针对冗余电机的商用车线控转向系统,能够实现双电机系统执行器发生故障时快速故障隔离和平滑转矩切换;文献[104]中采用双绕组永磁同步电机来实现转向电机的冗余备份,通过对比双通道电流比来进行诊断,检测到故障后采用电流补偿控制方法,使电机恢复正常运行或降级运行;文献[105]中针对双三相永磁同步电动机的速度传感器故障、电压传感器故障、电流传感器故障、开路故障和短路故障等5类故障,提出了3种传感器的故障诊断及补偿容错方法。
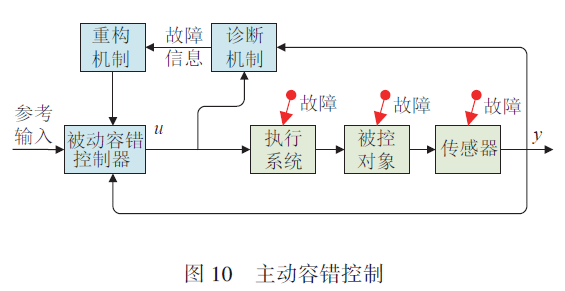
被动容错控制不需要在线故障信息,控制器参数和结构不随故障状态转移,因此容错能力有限。与之相对的主动容错控制是在故障发生后,根据所期望的系统特性重新调整控制器参数或改变控制器结构,使整个故障系统达到稳定,相比于被动容错控制,能够对未知故障的类型、时变特性设计容错策略,经典控制框图如图10所示。
利用基于模型的故障诊断方法设计主动容错控制策略,文献[106]中针对临时故障利用卡尔曼滤波器降低信号的噪声,针对硬件的永久性故障,如短缺、开路、灵敏度漂移和偏移,由模型观测器进行信号重构;文献[107]中采用扩展卡尔曼滤波算法获取车轮角度估计信号,与传感器信号进行对比,确认故障状态后对传感器信号进行隔离,并采用观测器重构的角度信号保证系统安全运行。
文献[108]中采用滑模观测器(sliding mode observer,SMO),引入了一种由故障残差设计的故障估计算法,残差仅对传感器故障敏感,根据不同传感器的特征向量来判断故障传感器,根据故障类型进行输出补偿;文献[109]中设计了自适应SMO,用于满足一些故障重建方法对故障上界的要求;文献[110]中采用双滑模观测器进行故障重构,采用阈值方法检测故障,当检测到故障时,通过对故障数据进行减除,基于SMO输出对故障重构。
文献[111]中基于MPC的反馈跟踪控制器估计各传感器的状态,根据可用的传感器重新配置;为了避免此类算法中故障可能导致的递归不可行性和计算复杂度,文献[112]中通过简单的在线数值计算来设计状态估计器,从而可以采用不含故障信息的常规MPC算法在线计算容错控制信号。
传统的基于模型和观测器的故障容错算法控制算法,存在难以获得精确数学模型的问题,而基于数据驱动的方法不需要对系统建模,依靠对故障数据的处理来进行诊断,文献[113]中采用基于学习的MPC估计故障信号,然后采用卡尔曼滤波算法重构故障信号;文献[114]中提出了一种基于并行数字孪生系统的容错控制方法,能够同时估计执行器和传感器故障,并对多种故障同时进行容错补偿。
由于传感器与执行器容错控制策略的生成依赖于故障诊断算法给出的结果,因此故障诊断结果的准确性十分重要,须对故障诊断信息置信度进行分析,而相关的研究较为匮乏。
4 挑战与发展方向
未来的商用车转向系统,需要进一步适应智能化的发展,实现更安全舒适的辅助驾驶及更高精度的自动驾驶,同时对系统精度及可靠性提出了更高的要求。面向未来的发展方向主要有:
(1) 随着新能源技术及电机技术的快速发展,商用车转向系统发展的趋势是从当前的电液耦合助力转向过渡到电动助力转向,最终实现线控转向;
(2) 电液耦合助力转向系统将通过对系统关键参数的优化提升系统控制性能,降低能耗;将利用先进控制算法补偿转向执行过程中液压系统的非线性与响应延迟,优化助力特性并提高控制精度;
(3) 商用车轨迹跟随过程中多目标协同控制研究,如轨迹跟随精度与侧倾稳定性之间的协同控制;
(4) 随着商用车底盘域整体的电控化,转向系统需要与其他底盘系统集成控制,以协调底盘域各子系统,优化系统性能并提升驾驶体验;
(5) 在商用车高级辅助驾驶领域,须根据执行器特性以及驾驶员个性设计人机交互体验良好并且安全可靠的控制策略;
(6) 商用车队队列控制须解决车队与其它交通参与者交互所产生的安全问题;端到端自动驾驶将拓展更多的应用场景;
(7) 将故障诊断及容错控制策略的设计嵌入到功能安全设计流程中,保证系统在软、硬件层面均达到相应的汽车安全完整性等级,进而提升整车安全性。

参考文献
[ 1] 国务院. 关于印发《智能汽车创新发展战略》的通知[EB/OL].2020. http://www. gov. cn/zhengce/zhengceku/2020-02/24/content_5482655.htm.The State Council. Notice on issuing the "intelligent vehicle innovation-and development strategy" [EB/OL]. 2020. http://www.gov.cn/zhengce/zhengceku/2020-02/24/content_ 5482655.htm.
[ 2] 国务院. 国务院关于印发“十四五”节能减排综合工作方案的通知[EB/OL]. 2021. http://www. gov. cn/zhengce/content/2022-01/24/ content_5670202.htm.The State Council. Notice of the state council on issuing the comprehensive work plan for energy conservation and emission reductionduring the 14th five year plan [EB/OL]. 2021.http://www.gov.cn/zhengce/content/2022-01/24/ content_5670202.htm.
[ 3] 李一染,权龙. 液压转向助力系统能耗特性的分析和比较[J].工程设计学报,2002(3):131-135.LI Y R, QUAN L. Analyzing and comparing energy dissipating character of hydraulic power steering system[J]. Journal of Engineering Design,2002(3):131-135.
[ 4] SONCHAL C P, GAJANKUSH J, KULKARNI A V,et al. Energy efficient hydraulic power assisted steering system (E 2 HPAS)[C]. SAE Paper 2012-01-0976.
[ 5] DYER G P. Analysis of energy consumption for various power assisted steering systems[J]. SAE Transactions, 1997:525-535.
[ 6] YU L, XUAN W, MA L, et al. A new type of electro-hydraulic power steering system for heavy-duty commercial vehicles[C].SAE Paper 2015-01-1502.
[ 7] SHUAI C, JIAN S. Extended state observer based control scheme for the A-EHPS with load pressure estimation[J]. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2017, 231(13):1858-1873.
[ 8] 国务院. 交通运输部关于印发《数字交通发展规划纲要》的通知[EB/OL]. 2019. http://www. gov. cn/xinwen/2019-07/28/content_5415971.htm.The State Council. Notice of the ministry of transport on issuing the "outline of digital transportation development plan"[EB/OL].2019. http://www.gov.cn/xinwen/2019-07/28/content_ 5415971.htm.
[ 9] ZF. Steering system[ EB/OL].https://www.zf.com/products/en/cv/products_76439.html.
[ 10] ZF. Steering system [EB/OL]. https://www. zf. com/products/en/cv/ products_76440.html.
[ 11] BOSCH. Products and services [A/OL]. https://www.bosch-mobility-solutions. com/en/products-and-services/commercial-vehicles/steering-systems/hydraulic-andelectrohydraulic-steeringsystems/.
[ 12] 耿国庆,李浩,江浩斌,等.商用车电液耦合转向系统主动回正控制研究[J].汽车工程, 2021, 43(6):899-908.GENG G Q, LI H, JIANG H B, et al. Research on active returnability control for electro ‐hydraulic coupling steering system of commercial vehicles[J]. Automotive Engineering 2021, 43(6):899-908.
[ 13] PARK J I, JEON K, YI K. The development of optimum control strategy for hybrid EPS system using Taguchi Method[C].2015 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015:761-766.
[ 14] PARK J I, JEON K, YI K. An investigation on the energy-saving effect of a hybrid electric-power steering system for commercial vehicles[J]. Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering, 2019, 233(6):1623-1648.
[ 15] ZHAO W, ZHOU X, WANG C, et al. Energy analysis and optimization design of vehicle electro-hydraulic compound steering system[J]. Applied Energy, 2019, 255:113713.
[ 16] TAO S, DONG Q, LIU Y, et al. Research on energy saving of hybrid power steering system for heavy commercial vehicles[C]. 2021 China Automation Congress (CAC). IEEE, 2021:4373-4378.
[ 17] ZHAO W, ZHOU X, WANG C, et al. Energy analysis and optimization design of vehicle electro-hydraulic compound steering system[J]. Applied Energy, 2019, 255:113713.
[ 18] ZHAO W, LUAN Z, WANG C. Parametric optimization of novel electric – hydraulic hybrid steering system based on a shuffled particle swarm optimization algorithm[J]. Journal of Cleaner Production,2018, 186:865-876.
[ 19] ZHAO W, LUAN Z, WANG C. Parameter optimization design of vehicle E-HHPS system based on an improved MOPSO algorithm[J]. Advances in Engineering Software, 2018, 123:51-61.
[ 20] ZHOU X, ZHAO W, WANG C. Performance analysis and multiobjective optimization design of vehicle electro-hydraulic compound steering system[J]. DEStech Transactions on Environment Energy and Earth Science, 2019.
[ 21] Nexteer. Electric power steering and wire controlled steering[ EB/OL]. https://www. chinese. nexteer. com/electric-power-steering/redundant-electric-power-steering/.
[ 22] ZF. Press center[ EB/OL]. https://press.zf.com/press/en/releases release_2948.html.
[ 23] 徐闯. 一种电动助力转向器及商用车:201821582276.5[ P].2019-05-17[2023-10-30]. https://pss-system.cponline.cnipa.gov.cn/ documents/detail?prevPageTit=changgui.XU C. An electric power steering device and a commercial vehicle:201821582276.5 [P]. 2019-05-17[2023-10-30]. https://pss-system.cponline.cnipa.gov.cn/documents/detail?prevPageTit=changgui.
[ 24] 纪国庆,陈波,牛永春,等 . 一种电动助力汽车转向器:201510622920.1 [P]. 2021-10-01[2023-10-30]. https://psssystem.cponline. cnipa. gov. cn/documents/detail?prevPageTit=changgui.JI G Q, CHEN B, NIU Y C, et al. An electric power-assisted vehicle steering gear:201510622920.1 [P]. 2021-10-01[2023-10-30]. https://pss-system.cponline.cnipa.gov.cn/documents/detail?prevPageTit=changgui.
[ 25] NHILA A, WILLIAMS D, GUPTA V. Integration of lane keeping assistance with steering[J]. SAE International Journal of Commercial Vehicle, 2013, 6(2):394-399.
[ 26] SUBROTO R K, WANG C Z, LIAN K L. Four-wheel independent drive electric vehiclestability control using novel adaptive sliding mode control [J]. IEEE Transactions on Industry Applications 2020, 56(5):5995-6006.
[ 27] LIU Y, JI X, YANG K, et al. Finite-time optimized robust control with adaptive state estimation algorithm for autonomous heavy vehicle[ J]. Mechanical System and Signal Processing, 2020, 139.
[ 28] HUANG Z, NIE W, KOU S, et al. Rollover detection and controlon the non-driven axles of trucks based on pulsed braking excitation[ J]. Vehicle System Dynamics, 2018,56(12):1864-1882.
[ 29] SHI G, ZHOU Q, WANG S. A hierarchical strategy for the electro-hydraulic coupling steering system on commercial vehicles[J]. DEStech Transactions on Environment, Energy and Earth Sciences, 2019.
[ 30] WANG S. Robust control of electro-hydraulic coupling power steering system for intelligent commercial vehicle with varying vehicle speed[C].2022 2nd International Conference on Consumer Electronics and Computer Engineering (ICCECE). IEEE, 2022:540-544.
[ 31] LIU C, WANG C, ZHAO W, et al. Displacement characteristics hierarchical control of electro-hydraulic compound steering for commercial vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science,2022, 236(12):6395-6409.
[ 32] HUANG S, CAO W, QIAN R, et al. Front wheel angle tracking control research of intelligent heavy vehicle steering system [J].Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2021, 235(17):3454-3467.
[ 33] LOOF J, BESSELINK I, NIJMEIJER H. Implementation and validation of a three degrees of freedom steering-system model in a full vehicle model [J]. Vehicle System Dynamics,2019, 57(1):86-107.
[ 34] GXA B, MC A, XH C, et al. Path following control of tractor with an electro-hydraulic coupling steering system:layered multi-loop robust control architecture[J]. Biosystems Engineering,2021, 209:282-299.
[ 35] SHI Guobiao, ZHOU Qian, WANG Shuai, et al. High robust control strategy for electro-hydraulic hybrid steering system in unmanned mode[J].Transactions of the Chinese Society for Agricultural Machinery,2019,50(12):395-402.
[ 36] ZHAO W Q, GAO K, WANG W B. Prevention of instability control of commercial vehicle based on electric-hydraulic coupling steering system[J]. Journal of Jilin University(Engineering and Technology Edition), 2018.
[ 37] LI Y, YU J, ZHAO Z, et al. Robust control of EHCS of intelligent commercial vehicle under load change[J]. Journal of Sensors,2021, 2021:1-9.
[ 38] WANG S. Robust control of electro-hydraulic coupling power steering system for intelligent commercial vehicle with varying vehicle speed[C].2022 2nd International Conference on Consumer Electronics and Computer Engineering (ICCECE). IEEE, 2022:540-544.
[ 39] 王帅,施国标,张洪泉,等.电液耦合转向系统转向盘转矩的自抗扰控制[J].汽车工程,2021,43(5):770-775,790.WANG S, SHI G B, ZHANG H Q, et al. Active disturbance rejection control of steering wheel torque in integrated electric‐hydraulic steering system[J]. Automotive Engineering,2021,43(5):770-775,790.
[ 40] TAI M, HINGWE P, TOMIZUKA M. Modeling and control of steering system of heavy vehicles for automated highway systems[J]. IEEE/ASME Transactions on Mechatronics, 2004, 9(4):609-618.
[ 41] DU H, WEI J, FANG J.The design, simulation, and experiment of high-accuracy multi-axle electro-hydraulic control servo steering system[J]. Advances in Mechanical Engineering, 2016, 8
(10):8/10/1687814016674383.[ 42] TAI M, HINGWE P, TOMIZUKA M. Modeling and control of steering system of heavy vehicles for automated highway systems[J]. IEEE/ASME Transaction on Mechatronics, 2004, 9(4):609-618.
[ 43] 董晴,季学武,刘玉龙,等.基于LPV/H∞鲁棒控制的重型商用车自动循迹[J]. 清华大学学报(自然科学版),2022,62(3):438-446.DONG Q, JI X W, LIU Y L, et al.Robust LPV/H∞ control for automatic path tracking of heavy commercial vehicles[J].J Tsinghua Univ( Sci&Technol),2022,62(3):438-446.
[ 44] HAO L Y, H. PARK J, YE D.Fuzzy logic systems-based integral sliding mode fault-tolerant control for a class of uncertain nonlinear systems[J].Control Theory & Applications Iet, 2016, 10(3):300-311.
[ 45] DU H, WANG L, CHEN J, et al.Integral sliding mode tracking control for heavy vehicle electro-hydraulic power steering system[J].IEEE/ASME Transactions on Mechatronics, 2020, PP(99):1-1.
[ 46] DU H, WANG L, CHEN J,et al.Adaptive fuzzy radial basis function neural network integral sliding mode tracking control for heavy vehicle electro-hydraulic power steering systems[J].Proceedings of the Institution of Mechanical Engineers Part D :Journal of Automobile Engineering, 2019, 234 (2-3) :095440701984637.
[ 47] XU Guangfei, CHEN Meizhou, HE Xiangkun, et al. Path following control of tractor with an electro-hydraulic coupling steering system:layered multi-loop robust control architecture[J]. Biosystems Engineering, 2021, 209:282-299.
[ 48] LOOF J, BESSELINK I, NIJMEIJER H. Component based modeling and validation of a steering system for a commercial vehicle[C]. IAVSD 2015.
[ 49] WANG S, YIN C, GAO J. Lateral displacement control for agricultural tractor based on cascade control structure [J]. International Journal of Control, Automation and Systems. 2020, 18(9):2375-2385.
[ 50] LI L. Progress on vehicle dynamics stability control system[J].Journal of Mechanical Engineering, 2013, 49(24).
[ 51] ANTONOV S, FEHN A, KUGI A. Unscented Kalman filter for vehicle state estimation [J]. Vehicle System Dynamics, 2011, 49(9):1497-520.
[ 52] MILANI S,SAMIM ÜNLÜSOY Y, MARZBANI H,et al.Semitrailer steering control for improved articulated vehicle manoeuvrability and stability[J].Nonlinear Engineering, 2019, 8(1):568-581.
[ 53] DENG Z, JIN Y, GAO W, et al. A closed-loop directional dynamics control with LQR active trailer steering for articulated heavy vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering, 2023, 237(12):2741-2758.
[ 54] BESSELINK I, ACHRIFI S, NIJMEIJER H.Lateral vehicle dynamics on rutted roads[J]. IAVSD 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. 2020.
[ 55] MITOV A, KRALEV J, SLAVOV T, et al. Reference tracking LQG control of electrohydraulic servo system for mobile machines[J].2020 IEEE 10th International Conference on Intelligent Systems(IS). IEEE, 2020.
[ 56] MITOV A, S LAVOV T, KRALEV J.Robustness analysis of an electrohydraulic steering control system based on the estimated uncertainty model[J].Information, 2021, 12.
[ 57] MITOV A, SLAVOV T, KRALEV J, et al. Robust stability and performance investigation of electrohydraulic steering control system[C].International Conference on Future Access Enablers of Ubiquitous and Intelligent Infrastructures. Cham:Springer International Publishing, 2021:386-400.
[ 58] JI X, LIU Y, HE X, et al. Interactive control paradigm-based robust lateral stability controller design for autonomous automobile path tracking with uncertain disturbance:a dynamic game approach[J]. IEEE Transactions on Vehicular Technology, 2018,67(8):6906-6920.
[ 59] MITOV A, KRALEV J, SLAVOV T, et al. Design of H-infinity tracking controller for application in autonomous steering of mobile machines[C]. 19th International Scientific Conference Engineering for Rural Development Proceedings. Latvia University of Life Sciences and Technologies, Faculty of Engineering, 2020.
[ 60] EMHEISEN M, EMIRLER M T, OZKAN B. Lateral stability control of articulated heavy vehicles based on active steering system[J]. International Journal of Mechanical Engineering and RoboticsResearch,2022.
[ 61] XU X, SU P, WANG F, et al. Coordinated control of dual-motor using the interval type-2 fuzzy logic in autonomous steering system of AGV[J]. International Journal of Fuzzy Systems,2021, 23(4):1070-1086.
[ 62] KIM J, YI K. Coordinated steering and braking control for roll stability of automated driving commercial vehicles[C].2021 IEEE International Intelligent Transportation Systems Conference(ITSC). IEEE, 2021:2568-2574.
[ 63] YAKUB F, ABU A, SARIP S, et al. Study of model predictive control for path-following autonomous ground vehicle control under crosswind effect[ J]. Journal of Control Science and Engineering,2016(5):1-18.
[ 64] KAYACAN E, SAEYS W, RAMON H, et al. Experimental validation of linear and nonlinear MPC on an articulated unmanned ground vehicle [J]. IEEE/ASME Transactions on Mechatronics,2018, 23(6):2023-2030.
[ 65] KISSAI M, MOUTON X, MONSUEZ B, et al. Tapus, optimizing vehicle motion control for generating multiple sensations [C].2018 IEEE Intelligent Vehicles Symposium (IV), Changshu,China, 2018:928-935.
[ 66] GUANG X, WUWEI C, LINFENG Z,et al.Integrated control of counterbalanced forklift truck chassis based on wavelet network dynamic inverse internal model control[J]. Journal of Mechanical Engineering, 2015.
[ 67] KIM J, YI K. Coordinated steering and braking control for roll stability of automated driving commercial vehicles[C].2021 IEEE International Intelligent Transportation Systems Conference(ITSC). IEEE, 2021:2568-2574.
[ 68] CAPITO L, REDMILL K A. Methodology for hazard identification and mitigation strategies applied to an overtaking assistant ADAS[C]. 2021 IEEE International Intelligent Transportation Systems Conference( ITSC). 0.
[ 69] HICKMAN J S, GUO F, CAMDEN M C,et al.Efficacy of roll stability control and lane departure warning systems using carriercollected data[J].J Safety Res, 2015, 52(feb.):59-63.DOI:10.1016/j.jsr.2014.12.004.
[ 70] WU C, CAO J, DU Y.Impacts of advanced driver assistance systems on commercial truck driver behaviour performance using naturalistic data[J].IET Intelligent Transport Systems, 2023.
[ 71] 施国标,张洪泉,王帅,等.商用车电液复合转向系统的车道保持策略[J].中国公路学报,2021,34(9):101-110.SHI G B, ZHANG H Q, WANG S, et al.Lane-keeping assistancestrategy for integrated electric-hydraulic steering system ofcommercial vehicles[J].China J.Highw.Transp.,2021,34(9):101-110.
[ 72] LI Y, NAN Y, HE J, et al. Study on lateral assisted control for commercial vehicles[C].2019 14th IEEE Conference on Industrial Electronics and Applications( ICIEA). IEEE, 2019:567-572.
[ 73] HAN X, ZHAO W, ZHENG H, et al. Research on lane-keeping control strategy for bus[J]. International Journal of Heavy Vehicle Systems, 2019, 26(3/4):291.
[ 74] 隋新,刘春阳,詹坤,等.人机协同控制的车道保持辅助系统安全性能研究[J].中国机械工程, 2021, 32(16):8.SUI X, LIU C Y, ZHAN K, et al. Research on safety performance of lane keeping assist systems based on human-machine cooperative control[J]. China Mechanical Engineering, 2021,32(16):8.
[ 75] LAZCANO A M R, NIU T, AKUTAIN X C, et al. MPC-based haptic shared steering system:a driver modeling approach for symbiotic driving[J]. IEEE/ASME Transactions on Mechatronics,2021, 26(3):1201-1211.
[ 76] SAEEDNIA M, MENENDEZ M. A consensus-based algorithm for truck platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2027,18(2):404-415.
[ 77] HOEF S V D, JOHANSSON K H, DIMAROGONAS D V.Fuelefficient en route formation of truck platoons[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(1):102-112
[ 78] GUO G, WANG Q.Fuel-efficient en route speed planning and tracking control of truck platoons[J].IEEE Transactions on Intelligent Transportation Systems, 2018, 20(8):3091-3103.
[ 79] KIM J.Truck platoon control considering heterogeneous vehicles[J].Applied Sciences, 2020, 10(15):5067.
[ 80] ZHANG S, LU C, JIANG S,et al.An unmanned intelligent transportation scheduling system for open-pit mine vehicles based on 5G and big data[J].IEEE Access, 2020, PP(99):1-1.
[ 81] GAO Y, AI Y, TIAN B,et al.Parallel end-to-end autonomous mining:an IoT-oriented approach[J]. IEEE Internet of Things Journal, 2019, PP(99):1-1.
[ 82] LEI Y, WANG Y, WU S, et al. A fuzzy logic-based adaptive dynamic window approach for path planning of automated driving mining truck[C].2021 IEEE International Conference on Mechatronics(ICM). IEEE, 2021:1-6.
[ 83] ZWEIGEL R, GEHRT J J, LIU S, et al. Optimal maneuvering and control of cooperative vehicles as case study for maritime applications within harbors[C].2019 18th European Control Conference(ECC). IEEE, 2019:3022-3027.
[ 84] ZWEIGEL R, GEHRT J J, LIU S,et al.Optimal maneuvering and control of cooperative vehicles as case study for maritime applications within harbors[C].European Control Conference,2019.
[ 85] HUANG C, LI L. Architectural design and analysis of a steerby-wire system in view of functional safety concept[J]. Reliability Engineering[ J]. System Safety, 2020, 198:106822.
[ 86] Road vehicles - functional safety - part 2:management of functional safety:ISO 26262-2:2018 [S]. Geneva, Switzerland:ISO, 2018.
[ 87] RAJASIMHA R C, ARJUN V, CHANDRASHEKHAR H G. Supplemental FMEA for monitoring and system response of electronic power steering control system functional safety[C]. SAE Paper2022 -28-0404.
[ 88] UMEHABA Y, KAMOSHITA S, ISHIGURI K, et al. Development of electro-hydraulic actuator with fail-safe function for steering system[J]. Quarterly Report of Rtri, 2014, 55(3):131-137.
[ 89] PRASANTH V, PAREKHJI R, AMRUTUR B. Exploiting application tolerance for functional safety[C].2021 IEEE International Test Conference( ITC). IEEE, 2021:399-408.
[ 90] XIONG H, WANG Z, WU G, et al. Steering actuator fault diagnosis for autonomous vehicle with an adaptive denoising residual network [J]. IEEE Transactions on Instrumentation and Measurement,2022, 71:1-13.
[ 91] MANDERS E J, NARASIMHAN S, BISWAS G, et al. A combined qualitative/quantitative approach for fault isolation in continuous dynamic systems[J]. IFAC Proceedings Volumes, 2000,33(11):505-510.
[ 92] WANG J, MIAO J, WANG J,et al.Fault diagnosis of electrohydraulic actuator based on multiple source signals:an experimental investigation[J].Neurocomputing, 2020, 417(17).
[ 93] ZHU F, SHAN Y, TANG Y.Actuator and sensor fault detection and isolation for uncertain switched nonlinear system based on sliding mode observers[J].International Journal of Control Automationand Systems, 2021.
[ 94] WEN L, LI X, GAO L. A transfer convolutional neural network for fault diagnosis based on ResNet-50[J].Neural Computing and Applications, 2019.
[ 95] ZOU S, ZHAO W, WANG C,et al. Fault detection strategy of vehicle wheel angle signal via long short-term memory network and improved sequential probability ratio test[J].IEEE Sensors Journal,2021(21-15).
[ 96] FERDOWSI H, CAIJ, JAGANNATHAN S. Actuator and sensor fault detection and failure prediction for systems with multi-dimensional nonlinear partial differential equations[J].International Journal of Control, Automation and Systems, 2022, 20(3):789-802.
[ 97] YIN S, GAO H, QIU J, et al. Descriptor reduced-order sliding mode observers design for switched systems with sensor and actuator faults[J]. Automatica, 2017, 76:282-292.
[ 98] LIU M, CAO X, SHI P. Fault estimation and tolerant control for fuzzy stochastic systems[J]. IEEETransactions on Fuzzy Systems,2012, 21(2):221-229.
[ 99] ABBINK D A, MULDER M, VAN DER HELM F C T, et al.Measuring neuromuscular control dynamics during car followingwith continuous haptic feedback[J]. IEEE Transactions on Systems,Man, and Cybernetics, Part B (Cybernetics), 2011, 41(5):1239-1249.
[ 100] SANCHEZ O D, MARTINEZ-SOLTERO G, ALVAREZ J G,et al. Real-time neural classifiers for sensor faults in three phaseinduction motors[J].IEEE Access, 2023,11:19657-19668.
[ 101] PENG X, HOU S, LI Y. Study on a dual-motor driving electric power steering system for commercial vehicle[C]. 2016 IEEE 11th Conference on Industrial Electronics and Applications(ICIEA). IEEE, 2016.
[ 102] LI Y, HE J, NAN Y, et al. A dual-motor electric power steering system for commercial vehicle[C]. IEEE Conference on Industrial Electronics and Applications. IEEE, 2019.
[ 103] NOH Y, KIM W, JU L. The optimal current ratio control of redundant electric drive systems and diagnostic strategies for disagreement[J]. IEEE Access, 2021,9:32115-32130.
[ 104] SHI G, QIAO P, SANG D, et al. Synchronous and fault-tolerance control for dual-motor steer-by-wire system of commercial vehicle[J]. Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering, 2023:09544070231154961.
[ 105] WANG X, WANG Z, XU Z,et al.Comprehensive diagnosis andtolerance strategies for electrical faults and sensor faults in dualthree-phase PMSM drives[J].IEEE Transactions on Power Electronics,2019, 34(7):6669-6684.
[ 106] OH Y I, KIM J H, JUNG S Y, et al. Sensor fault tolerant algorithm for 7.2nm class spmsm applied electro-hydraulic powersteering system for medium and heavy commercial vehicle[C].2018 3rd International Conference on Robotics and Automation Engineering( ICRAE), 2018.
[ 107] ZOU S, ZHAO W, LIANG W,et al.Fault diagnosis and fault-tolerant compensation strategy for wheel angle sensor of steer-bywire vehicle via extended Kalman filter[J].IEEE Sensors Journal,2022(2):22.
[ 108] KANG H, XIAO B, NI Y, et al. Sensor fault diagnosis and fault tolerant control for automated guided forklift[J]. IEEE Access,2021, 9:56191-56200.
[ 109] ZHANG Z, XIAO B.Sensor fault diagnosis and fault tolerant control for forklift based on sliding mode theory[J].IEEE Access,2020, PP(99):1-1.DOI:10.1109/ACCESS.2020.2991188.
[ 110] SONG T, LEE J, OH K, et al.Dual-sliding mode approach for separated fault detection and tolerant control for functional safety of longitudinal autonomous driving[J].Proceedings of the Institution of Mechanical Engineers Part D:Journal of Automobile Engineering,2020 (6) :095440702096262. DOI:10.1177/0954407020962627.
[ 111] MCCLOY R, DE DONÁ J, SERON M. Fault-tolerant fusionbased MPC with sensor recovery for constrained LPV systems[J].International Journal of Robust and Nonlinear Control, 2018, 28(11):3589-3605.
[ 112] LI J, ZHANG D, WANG Z. Novel MPC-based fault tolerant tracking control against sensor faults[J]. Asian J. Control, 2020,22:841-854.
[ 113] ZHANG C, XU X, ZHANG X. Fault-tolerant learning-based MPC for unmanned ground vehicle[J].Springer, Singapore, 2022.
[ 114] KUKUROWSKI N, PAZERA M, WITCZAK M, et al. Fault-toleranttracking control for Takagi–Sugeno fuzzy systems under actuatorand sensor faults[C]. Advanced, Contemporary Control:Proceedings of KKA 2020—The 20th Polish Control Conference,Łódź, Poland, 2020. Cham:Springer International Publishing,2020:1434-1445.
END
