
转自 | 羽林君
总述
1. 简单的顺序执行程序:这类写法是大多数人使用的方法,不需用思考程序的具体架构,直接按照执行顺序编写应用程序即可。
这种应用程序比较简单,一般作为初阶简单使用,实时性以及要求不太高的情况下,可以使用。程序的设计比较简单,思路比较清晰。但是主循环的逻辑比较复杂的时候,如果没有完整的流程图指导,其他人很难看懂程序运行逻辑。
下面写一个顺序执行的程序模型
int main(void){uint8 TaskValue;InitSys(); // 初始化while (1){TaskValue= GetTaskValue();switch (TaskValue){case x:TaskDispStatus();break;...default:break;}}}
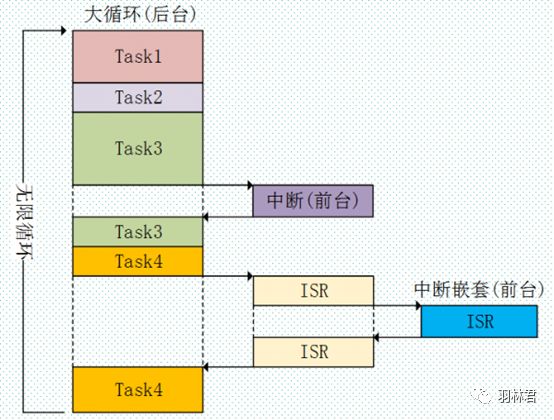
这种程序特点是,后台大循环中一直执行默认的程序,中断服务程序(ISR)产生相应中断标记,主程序运行与中断标记相关联的任务程序。一般实现有如下思路:
通过设置标志变量,然后在前台响应中断的时候进行对标志变量的置位或者复位,实现事件的信号获取,再在后台主循环进行中断所对应事物或者数据的处理,将程序流程转移到主程序。
前后台执行的程序
void IRQHandler(void){if(GetITStatus == 1){SysFlag = 1;GetITStatus = 0;}}int main(void){uint8 TaskValue;InitSys(); // 初始化while (1){TaskValue= GetTaskValue();switch (TaskValue){case x:if(SysFlag == 1){TaskDispStatus();SysFlag == 0;}break;...default:break;}}}
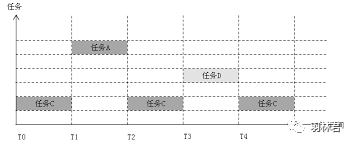
时间片轮循法,大家看到它的时候,一般会将它与操作系统进行比较。不是说操作系统包含这种方法,而是在前后台程序中配合时间管理形成时间片轮循架构。
这种架构已经最大限度接近RTOS,时间管理,中断管理,任务管理,已经都有了,只不过RTOS会对内核进行更深入的修改,有针对delay延时的线程切换,抢占式任务切换这些更为复杂一些的功能等。
时间片轮循程序
时间片管理主要是通过对定时多处复用,在定时器计数,定时进行标志位的变化,继而主程序对标志真假的判断,实现不同时间不同任务状态执行。
因为此架构代码比较好,我适当进行详细描述。
step
1:初始化相应的定时器:注意设置定时器的间隔频率,可以按照芯片的性能设置。例如,设置定时中断为1ms,也可以设置为10ms,轮循架构中的定时器部分与操作系统的定时器部分具有一样的功能,中断过于频繁,影响主程的序执行效率;中断间隔过长,实时响应效果差。
2:针对定时器运行的任务设置一个函数结构体标志,用来在定时程序进行时间计数以及标志操作。
# TaskTAB_NUM 6 //任务数量__packed typedef struct{u8 flag; //定时标志u32 numcount;//按照定时中断进行计数u32 target; //设置的定时目标数值int(*fun)(void);//设置定时执行的目标任务函数}TaskTimTypeDef
step
3:建立一个任务表,通过结构体表的设置,确定任务执行的时间表。
在定义变量时,我们已经初始化了值,这些值的初始化,非常重要,跟具体的执行时间优先级等都有关系,这个需要自己掌握。
/*MdmSendTimTab任务函数默认周期,单位5ms,TIM7*/static TaskTimTypeDef TaskTimTab[TaskTAB_NUM] ={{1, 0, 30000, *Task00}, //Task00 3000数值是设置的定时目标值,如果觉得反应过慢,可以将此值设置小{1, 0, 3000, *Task01}, //Task01{1, 0, 300, *Task02}, //Task02{1, 0, 30, *Task03}, //Task03{1, 0, 3, *Task04}, //Task04{1, 0, 0xFFFFFFFF, *Task05}, //Task05//可以按照TaskTAB_NUM数量添加任务};int Task00(void)//按照结构体的函数模板(int(*fun)(void);)写任务函数{...}//假设执行按键操作int Task01(void){...}//假设执行USART发送任务int Task02(void){...}//假设执行CAN通讯int Task03(void){...}//假设执行继电器控制int Task04(void){...}//假设执行网络解析int Task06(void){...}//假设执行空
step
4:定时中断服务函数,按照我们需要的时间以及标志操作进行计时。
//定时中断服务函数void TimerInterrupt(void){for(char i=0; i<TaskTAB_NUM; i++){if(TaskTimTab[i].flag == 1){(TaskTimTab[i].numcount< TaskTimTab[i].target)//比较目前定时计数与目标时间(TaskTimTab[i].numcount++):(TaskTimTab[i].flag = 0);}}}
step
5:主函数进行任务函数执行。
int main(void){InitSys(); // 初始化while (1){for(char i=0; i<TaskTAB_NUM; i++)//// 任务处理{if(TaskTimTab[i].flag == 0){if(TaskTimTab.flag == 0){TaskTimTab[i].flag = 1;TaskTimTab[i].numcount= 0;TaskTimTab[i].fun();}}}}
嵌入式操作系统是更加优化的执行框架,针对多任务,功能复杂,扩展性要求强项目的代码有非常好的使用。RTOS是针对不同处理器优化设计的高效率实时多任务内核,RTOS可以面对几十个系列的嵌入式处理器MPU、MCU、DSP、SOC等提供类同的API接口,这是RTOS基于设备独立的应用程序开发基础。因此,基于RTOS的C语言程序具有极大的可移植性。目前针对微嵌入式或者单片机的操作系统有VxWorks、UCOS、Free RTOS、国产的RTT,这些操作系统大同小异,基本的功能都类似:任务管理、任务间同步和通信、内存管理、实时时钟服务、中断管理服务。
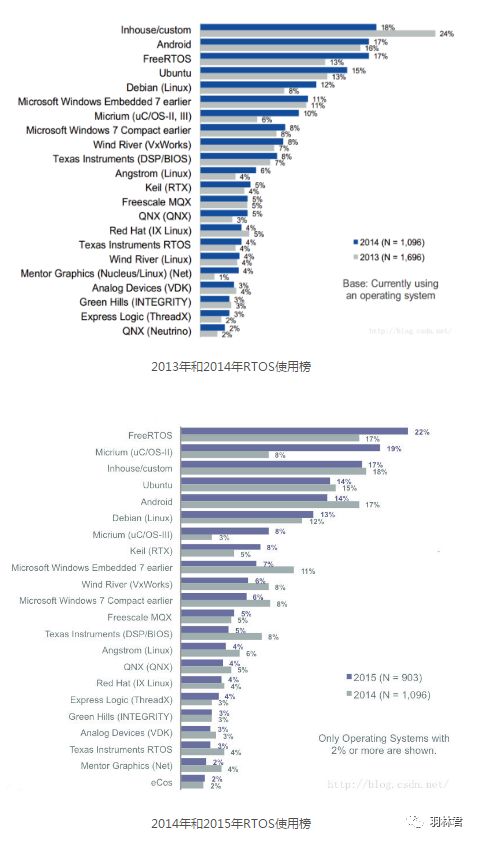
(图片来源博客)
RTOS在时间轮循的架构上继续增加了任务挂起以及恢复,阻塞切换线程等,属于功能累加,进一步的优化。由于本次不是对RTOS的讲解,本人学习应用有UCOS、RTT、Free RTOS几个操作系统,因为篇幅有限,时间有限,我抽时间再进行详细的RTOS系统架构学习等的介绍。
目前RTOS系统有很多,很多项目都倾向于使用RTOS,但是通过几种架构的分析明白不同的项目需要不同的架构,并不是所有项目都需要,也都适合使用RTOS,例如项目中各个任务耦合性过大,如果用RTOS需要很多的任务同步,甚至都无法进行线程的规划。这样就完全失去RTOS意义,此时用某些裸机的架构反而更合适。

1.虚拟圆桌会议Part 1——嵌入式系统信息安全
2.华为5G的秘密原来掌握在一个土耳其人的手中?!
3.半导体最新排名出炉,英伟达实现50%增长!
4.【MCU】一种"灵活且省资源"的IAP升级方案
5.RISC-V为什么会成为热点?
6.适合开发人员看的鸿蒙OS介绍~

免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。
