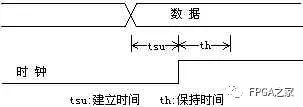
建立时间(setup time)是指在触发器的时钟信号上升沿到来以前,数据稳定不变的时间,如果建立时间不够,数据将不能在这个时钟上升沿被打入触发器;保持时间(hold time)是指在触发器的时钟信号上升沿到来以后,数据稳定不变的时间, 如果保持时间不够,数据同样不能被打入触发器。如图1 。数据稳定传输必须满足建立和保持时间的要求,当然在一些情况下,建立时间和保持时间的值可以为零。PLD/FPGA开发软件可以自动计算两个相关输入的建立和保持时间
竞争和冒险
PLD内部毛刺产生的原因
我们在使用分立元件设计数字系统时,由于PCB走线时,存在分布电感和电容,所以几纳秒的毛刺将被自然滤除,而在PLD内部决无分布电感和电容,所以在PLD/FPGA设计中,竞争和冒险问题将变的较为突出。
FPGA中的冒险现象
信号在FPGA器件内部通过连线和逻辑单元时,都有一定的延时。延时的大小与连线的长短和逻辑单元的数目有关,同时还受器件的制造工艺、工作电压、温度等条件的影响。信号的高低电平转换也需要一定的过渡时间。由于存在这两方面因素,多路信号的电平值发生变化时,在信号变化的瞬间,组合逻辑的输出有先后顺序,并不是同时变化,往往会出现一些不正确的尖峰信号,这些尖峰信号称为"毛刺"。如果一个组合逻辑电路中有"毛刺"出现,就说明该电路存在"冒险"。(与分立元件不同,由于PLD内部不存在寄生电容电感,这些毛刺将被完整的保留并向下一级传递,因此毛刺现象在PLD、FPGA设计中尤为突出)
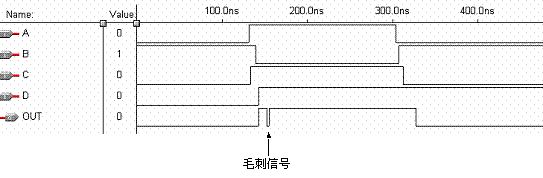
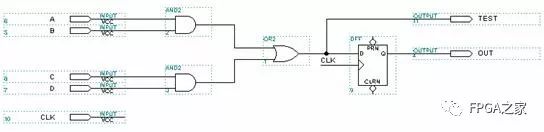
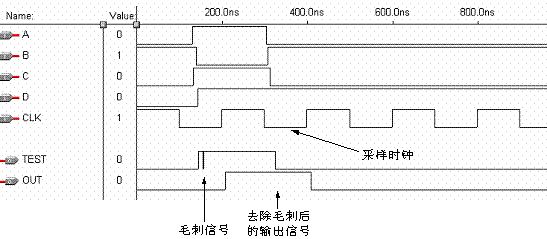
图1给出了一个逻辑冒险的例子,从图6.22的仿真波形可以看出,"A、B、C、D"四个输入信号经过布线延时以后,高低电平变换不是同时发生的,这导致输出信号"OUT"出现了毛刺。(我们无法保证所有连线的长度一致,所以即使四个输入信号在输入端同时变化,但经过PLD内部的走线,到达或门的时间也是不一样的,毛刺必然产生)。可以概括的讲,只要输入信号同时变化,(经过内部走线)组合逻辑必将产生毛刺。将它们的输出直接连接到时钟输入端、清零或置位端口的设计方法是错误的,这可能会导致严重的后果。所以我们必须检查设计中所有时钟、清零和置位等对毛刺敏感的输入端口,确保输入不会含有任何毛刺
冒险往往会影响到逻辑电路的稳定性。时钟端口、清零和置位端口对毛刺信号十分敏感,任何一点毛刺都可能会使系统出错,因此判断逻辑电路中是否存在冒险以及如何避免冒险是设计人员必须要考虑的问题。
判断一个逻辑电路在某些输入信号发生变化时是否会产生冒险,首先要判断信号是否会同时变化,然后判断在信号同时变化的时候,是否会产生冒险,这可以通过逻辑函数的卡诺图或逻辑函数表达式来进行判断。对此问题感兴趣的读者可以参考有关脉冲与数字电路方面的书籍和文章
如何处理毛刺
我们可以通过改变设计,破坏毛刺产生的条件,来减少毛刺的发生。例如,在数字电路设计中,常常采用格雷码计数器取代普通的二进制计数器,这是因为格雷码计数器的输出每次只有一位跳变,消除了竞争冒险的发生条件,避免了毛刺的产生。
毛刺并不是对所有的输入都有危害,例如D触发器的D输入端,只要毛刺不出现在时钟的上升沿并且满足数据的建立和保持时间,就不会对系统造成危害,我们可以说D触发器的D输入端对毛刺不敏感。根据这个特性,我们应当在系统中尽可能采用同步电路,这是因为同步电路信号的变化都发生在时钟沿,只要毛刺不出现在时钟的沿口并且不满足数据的建立和保持时间,就不会对系统造成危害。(由于毛刺很短,多为几纳秒,基本上都不可能满足数据的建立和保持时间)
以上方法可以大大减少毛刺,但它并不能完全消除毛刺,有时,我们必须手工修改电路来去除毛刺。我们通常使用"采样"的方法。一般说来,冒险出现在信号发生电平转换的时刻,也就是说在输出信号的建立时间内会发生冒险,而在输出信号的保持时间内是不会有毛刺信号出现的。如果在输出信号的保持时间内对其进行"采样",就可以消除毛刺信号的影响。
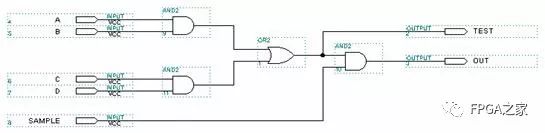
有两种基本的采样方法:一种方法是在输出信号的保持时间内,用一定宽度的高电平脉冲与输出信号做逻辑"与"运算,由此获取输出信号的电平值。图6.23说明了这种方法,采样脉冲信号从输入引脚"SAMPLE"引入。从图2
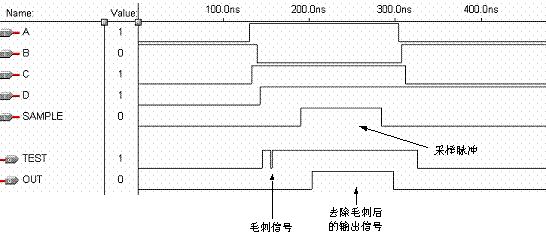
的仿真波形上可以看出,毛刺信号出现在"TEST"引脚上,而"OUT"引脚上的毛刺已被消除了.
上述方法的一个缺点是必须人为的保证sample信号必须在合适的时间中产生,另一种更常见的方法是利用D触发器的D输入端对毛刺信号不敏感的特点,在输出信号的保持时间内,用触发器读取组合逻辑的输出信号,这种方法类似于将异步电路转化为同步电路。图1给出了这种方法的示范电路,图2是仿真波形
 在仿真时,我们也可能会发现在FPGA器件对外输出引脚上有输出毛刺,但由于毛刺很短,加上PCB本身的寄生参数,大多数情况下,毛刺通过PCB走线,基本可以自然被虑除,不用再外加阻容滤波。
在仿真时,我们也可能会发现在FPGA器件对外输出引脚上有输出毛刺,但由于毛刺很短,加上PCB本身的寄生参数,大多数情况下,毛刺通过PCB走线,基本可以自然被虑除,不用再外加阻容滤波。
时钟周期为T,触发器D1的时钟沿到来到触发器Q变化的时间Tco(CLK--Q)最大为T1max,最小为T1min,逻辑组合电路的延迟时间最大为T2max,最小为T2min,问触发器D2的建立时间和保持时间。
最终答案:T3setup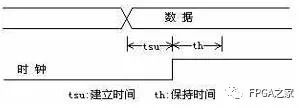 因为触发器内部数据的形成是需要一定的时间的,如果不满足建立和保持时间,触发器将进入亚稳态,进入亚稳态后触发器的输出将不稳定,在0和1之间变化,这时需要经过一个恢复时间,其输出才能稳定,但稳定后的值并不一定是你的输入值。这就是为什么要用两级触发器来同步异步输入信号。这样做可以防止由于异步输入信号对于本级时钟可能不满足建立保持时间而使本级触发器产生的亚稳态传播到后面逻辑中,导致亚稳态的传播。两级触发器可防止亚稳态传播的原理:假设第一级触发器的输入不满足其建立保持时间,它在第一个脉冲沿到来后输出的数据就为亚稳态,那么在下一个脉冲沿到来之前,其输出的亚稳态数据在一段恢复时间后必须稳定下来,而且稳定的数据必须满足第二级触发器的建立时间,如果都满足了,在下一个脉冲沿到来时,第二级触发器将不会出现亚稳态,因为其输入端的数据满足其建立保持时间。同步器有效的条件:第一级触发器进入亚稳态后的恢复时间 + 第二级触发器的建立时间 < = 时钟周期。(编者注:maxbird在该部分详细说明了建立时间和保持时间的概念,以及如果不满足二者可能导致的亚稳态的传播。注意这里说的建立时间和保持时间都是针对时钟而言的,在进行时序约束时所指的就是这种,而很多网友以前学习的建立时间保持时间的概念是针对信号而言的,所指的对象不同,分析出来的结论完全相反,一定注意不要混淆。)lh1688:不考虑CLOCK SKEW情况下。D2的建立时间要求:Tco1+T1(logic delay)+Tsetup2 < Tc(CLOCK 周期) 。那么 Tsetup2 < Tc(CLOCK 周期) -(Tco1+T1)。这个应该比较容易理解。相对的保持时间实际就是 路径的总延时 (Tco1+T1)。保持时间 Thold2 < (Tco1+T1)。
因为触发器内部数据的形成是需要一定的时间的,如果不满足建立和保持时间,触发器将进入亚稳态,进入亚稳态后触发器的输出将不稳定,在0和1之间变化,这时需要经过一个恢复时间,其输出才能稳定,但稳定后的值并不一定是你的输入值。这就是为什么要用两级触发器来同步异步输入信号。这样做可以防止由于异步输入信号对于本级时钟可能不满足建立保持时间而使本级触发器产生的亚稳态传播到后面逻辑中,导致亚稳态的传播。两级触发器可防止亚稳态传播的原理:假设第一级触发器的输入不满足其建立保持时间,它在第一个脉冲沿到来后输出的数据就为亚稳态,那么在下一个脉冲沿到来之前,其输出的亚稳态数据在一段恢复时间后必须稳定下来,而且稳定的数据必须满足第二级触发器的建立时间,如果都满足了,在下一个脉冲沿到来时,第二级触发器将不会出现亚稳态,因为其输入端的数据满足其建立保持时间。同步器有效的条件:第一级触发器进入亚稳态后的恢复时间 + 第二级触发器的建立时间 < = 时钟周期。(编者注:maxbird在该部分详细说明了建立时间和保持时间的概念,以及如果不满足二者可能导致的亚稳态的传播。注意这里说的建立时间和保持时间都是针对时钟而言的,在进行时序约束时所指的就是这种,而很多网友以前学习的建立时间保持时间的概念是针对信号而言的,所指的对象不同,分析出来的结论完全相反,一定注意不要混淆。)lh1688:不考虑CLOCK SKEW情况下。D2的建立时间要求:Tco1+T1(logic delay)+Tsetup2 < Tc(CLOCK 周期) 。那么 Tsetup2 < Tc(CLOCK 周期) -(Tco1+T1)。这个应该比较容易理解。相对的保持时间实际就是 路径的总延时 (Tco1+T1)。保持时间 Thold2 < (Tco1+T1)。
*免责声明:本文由作者原创。文章内容系作者个人观点,路科验证转载仅为了传达一种不同的观点,不代表路科验证对该观点赞同或支持,如果有任何异议,欢迎联系路科验证。
