USART3_DR的地址
DMA的通道
DMA的中断
USART接收回调函数
头文件源码
DMA的基本配置
环形队列接收数据
函数原型
参考用例
总结
硬件:stm32f103cbt6
软件:STM32F10x_StdPeriph_Lib_V3.5.0
DMA,直接内存存取,可以用它的双手释放CPU的灵魂,所以,本文通过USART3进行串口收发,接受使用DMA的方式,无需CPU进行干预,当接受完成之后,数据可以直接从内存的缓冲区读取,从而减少了CPU的压力。
具体的代码实现如下:
usart_driver.h 封装了接口,数据接收回调函数类型,基本数据结构等;
usart_driver.c 函数原型实现,中断服务函数实现等;
拷贝这两个文件即可,可以根据目录下的参考用例,进行初始化。
头文件usart_driver.h已经声明了外部函数可能用到的接口;
因为USART3接收到数据会存在DR寄存器中,而DMA控制器则负责将该寄存器中的内容一一搬运到内存的缓冲区中(比如你定义的某个数组中),所以这里需要告诉DMA控制去哪里搬运,因此需要设置USART3_DR的总线地址。
USART3的基址如下图所示;
DR寄存器的偏移地址如下图所示;
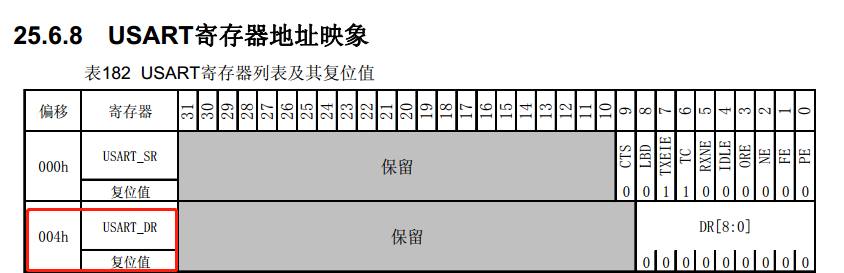
所以最终地址为:0x40004800 + 0x004#define USART_DR_Base 0x40004804
因为有很多外设都可以使用DMA,比如ADC,I2C,SPI等等,所以,不同的外设就要选择属于自己的DMA通道,查找参考手册;
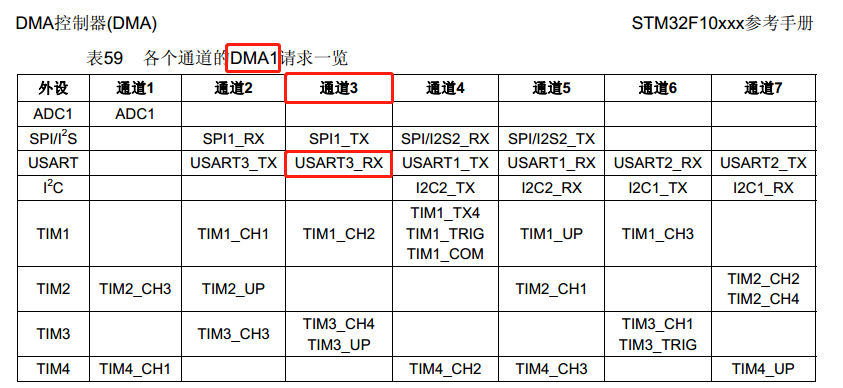
因此USART3_RX在这里会使用DMA1的通道3,这都是硬件上已经预先分配好的,我们需要遵循这个规则。所以在代码中我们做出相应的定义;如下所示;
#define USART_Rx_DMA_Channel DMA1_Channel3
DMA支持三种中断:传输过半,传输完成,传输出错;
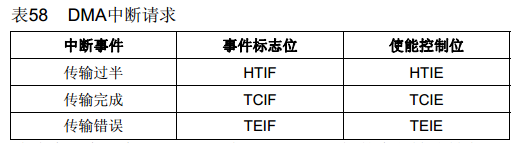
因此在使用是相当安全也相当灵活,而本文只是用了传输完成中断;如下定义了,传输完成中断的标志位,DMA1_FLAG_TC3也就对应了图中的TCIF;
#define USART_Rx_DMA_FLAG DMA1_FLAG_TC3
在STM32的HAL中封装了大量外设的回调函数,使用起来十分方便,但是标准库中则没有这样的做法,但是这里我们可以自己实现,rx_cbk就是回调,即串口数据接收完成就会执行已经注册的回调函数;
typedef void (*rx_cbk)(void* args);
通过使用接口usart_set_rx_cbk进行回调函数的注册,pargs为将传递的参数指针;
void usart_set_rx_cbk(uart_mod_t *pmod, rx_cbk pfunc,void *pargs);
#ifndef USART_DRIVER_H
#define USART_DRIVER_H
#include <stdio.h>
#include <stdint.h>
/* Private function prototypes -----------------------------------------------*/
#define USE_MICROLIB_USART 1
#if USE_MICROLIB_USART
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
//#define GETCHAR_PROTOTYPE int fgetc(FILE *f)
#endif /* __GNUC__ */
extern PUTCHAR_PROTOTYPE;
#else
#endif
//default 8N1
#define COM_PORT USART3
#define TX_PIN GPIO_Pin_10
#define RX_PIN GPIO_Pin_11
#define BAUDRATE 115200
#define IRQ_UART_PRE 3
#define IRQ_UART_SUB 3
#define USART_Rx_DMA_Channel DMA1_Channel3
#define USART_Rx_DMA_FLAG DMA1_FLAG_TC3
#define USART_DR_Base 0x40004804
#define USART_BUF_SIZE ((uint16_t)16)
typedef void (*rx_cbk)(void* args);
struct uart_mod {
uint8_t rx_buf[USART_BUF_SIZE];
uint8_t rx_dat_len;
uint8_t head;
uint8_t tail;
void (*init)(void);
void *pargs;
rx_cbk pfunc_rx_cbk;
};
typedef struct uart_mod uart_mod_t;
extern uart_mod_t user_uart_mod;
void usart_init(void);
void usart_set_rx_cbk(uart_mod_t *pmod, rx_cbk pfunc,void *pargs);
void usart_send_char(char ch);
void usart_test_echo(void);
uint8_t usart_recv_char(void);
int usart_printf(const char *fmt, ...);
//extern GETCHAR_PROTOTYPE;
#endif
串口接收DMA的配置在函数dma_init中;
static void dma_init(void)
已经定义了数据缓冲区,如下:
uint8_t RxBuffer[USART_BUF_SIZE] = { 0 };
因此需要在DMA的配置中设置USART_DR的地址,和数据缓冲区的地址,以及两者的大小;还有就是数据流向;
DMA_InitStructure.DMA_PeripheralBaseAddr = USART_DR_Base;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)RxBuffer;
DMA_InitStructure.DMA_BufferSize = USART_BUF_SIZE;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
注意:DMA_DIR_PeripheralSRC表示,外设作为源地址,数据是从外设寄存器流向内存,即DMA会把数据从地址USART_DR_Base搬运到RxBuffer去。如果这个地方搞错,会导致RxBuffer始终没有你想要的数据。
线性缓冲区会因为缓冲器接收数据已满导致无法继续接收的问题;而环形队列进行接收的话,会自动进行覆盖,这样一来,在读取数据的时候,也要配置一个环形队列进行数据处理,下面的配置是把DMA配置为循环模式;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
在结构体user_uart_mod中,则用两个变量分别指向队首head和队尾tail;具体数据的读取在函数USART3_IRQHandler中,会把数据从内存的RxBuffer读取到结构体user_uart_mod的成员变量rx_buf中;最终调用回调函数。
usart_driver.c
#include <stdio.h>
#include <stdarg.h>
#include "stm32f10x_usart.h"
#include "usart_driver.h"
uint8_t RxBuffer[USART_BUF_SIZE] = { 0 };
uart_mod_t user_uart_mod = {
.rx_dat_len = 0,
.head = 0,
.tail = 0,
.pfunc_rx_cbk = NULL,
.pargs = NULL
};
static USART_InitTypeDef USART_InitStructure;
static void rcc_init(void){
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* Enable GPIO clock */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB
| RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART3, ENABLE);
}
static void gpio_init(void){
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure USART Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = TX_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure USART Rx as input floating */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = RX_PIN;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
static void dma_init(void){
DMA_InitTypeDef DMA_InitStructure;
/* USARTy_Tx_DMA_Channel (triggered by USARTy Tx event) Config */
DMA_DeInit(USART_Rx_DMA_Channel);
DMA_InitStructure.DMA_PeripheralBaseAddr = USART_DR_Base;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)RxBuffer;
//DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = USART_BUF_SIZE;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(USART_Rx_DMA_Channel, &DMA_InitStructure);
}
static void irq_init(void){
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable the USART3_IRQn Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = IRQ_UART_PRE;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = IRQ_UART_SUB;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void usart_send_char(char ch){
/* Loop until the end of transmission */
//while (USART_GetFlagStatus(COM_PORT, USART_FLAG_TC) == RESET){}
while((COM_PORT->SR & USART_FLAG_TC) != USART_FLAG_TC){
}
USART_SendData(COM_PORT, (uint8_t) ch);
}
uint8_t usart_recv_char(){
/* Wait the byte is entirely received by USARTy */
//while(USART_GetFlagStatus(COM_PORT, USART_FLAG_RXNE) == RESET){}
while((COM_PORT->SR & USART_FLAG_RXNE) != USART_FLAG_RXNE){
}
/* Store the received byte in the RxBuffer1 */
return (uint8_t)USART_ReceiveData(COM_PORT);
}
int usart_printf(const char *fmt, ... )
{
uint8_t i = 0;
uint8_t usart_tx_buf[128] = { 0 };
va_list ap;
va_start(ap, fmt );
vsprintf((char*)usart_tx_buf, fmt, ap);
va_end(ap);
while(usart_tx_buf[i] && i < 128){
usart_send_char(usart_tx_buf[i]);
i++;
}
usart_send_char('\0');
return 0;
}
void usart_test_echo(){
uint8_t tmp_dat = 0xff;
tmp_dat = usart_recv_char();
usart_send_char(tmp_dat);
}
void usart_init(void){
rcc_init ();
gpio_init ();
irq_init();
/* USARTx configured as follow:
- BaudRate = 115200 baud
- Word Length = 8 Bits
- One Stop Bit
- No parity
- Hardware flow control disabled (RTS and CTS signals)
- Receive and transmit enabled
*/
USART_InitStructure.USART_BaudRate = BAUDRATE;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* USART configuration */
USART_Init(COM_PORT, &USART_InitStructure);
USART_ITConfig(COM_PORT, USART_IT_IDLE, ENABLE);
//USART_ITConfig(COM_PORT, USART_IT_RXNE, ENABLE);
/* Enable USART */
USART_Cmd(COM_PORT, ENABLE);
USART_DMACmd(COM_PORT,USART_DMAReq_Rx, ENABLE);
dma_init();
DMA_ITConfig(USART_Rx_DMA_Channel, DMA_IT_TC, ENABLE);
DMA_ITConfig(USART_Rx_DMA_Channel, DMA_IT_TE, ENABLE);
DMA_Cmd(USART_Rx_DMA_Channel, ENABLE);
}
void usart_set_rx_cbk(uart_mod_t *pmod, rx_cbk pfunc,void *pargs){
pmod->pargs = pargs;
pmod->pfunc_rx_cbk = pfunc;
}
void DMA1_Channel3_IRQHandler(void){
if(DMA_GetITStatus(USART_Rx_DMA_FLAG) == SET){
DMA_ClearITPendingBit(USART_Rx_DMA_FLAG);
}
}
/**
* @brief This function handles USART3 global interrupt request.
* @param None
* @retval None
*/
void USART3_IRQHandler(void)
{
uint8_t buf[USART_BUF_SIZE];
uint16_t rect_len = 0;
if(USART_GetITStatus(COM_PORT, USART_IT_IDLE) != RESET)
{
uint8_t i = 0;
USART_ReceiveData(COM_PORT);
user_uart_mod.head = USART_BUF_SIZE - DMA_GetCurrDataCounter(USART_Rx_DMA_Channel);
//fifo is not full
while(user_uart_mod.head%USART_BUF_SIZE != user_uart_mod.tail%USART_BUF_SIZE){
user_uart_mod.rx_buf[i++] = RxBuffer[user_uart_mod.tail++%USART_BUF_SIZE];
}
user_uart_mod.rx_dat_len = i;
//DMA_Cmd(USART_Rx_DMA_Channel, ENABLE);
if(user_uart_mod.pfunc_rx_cbk != NULL){
user_uart_mod.pfunc_rx_cbk(user_uart_mod.pargs);
}
}
USART_ClearITPendingBit(COM_PORT, USART_IT_IDLE);
//USART_ClearITPendingBit(COM_PORT, USART_IT_RXNE);
}
#if USE_MICROLIB_USART
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART */
USART_SendData(COM_PORT, (uint8_t) ch);
/* Loop until the end of transmission */
while (USART_GetFlagStatus(COM_PORT, USART_FLAG_TC) == RESET)
{}
return ch;
}
#else
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
int _sys_exit(int x)
{
x = x;
return 0;
}
int fputc(int ch, FILE *f)
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART */
USART_SendData(COM_PORT, (uint8_t) ch);
/* Loop until the end of transmission */
while (USART_GetFlagStatus(COM_PORT, USART_FLAG_TC) == RESET)
{}
return ch;
}
#endif
这里需要调用usart_init,并设置回调函数,如果不设置,则不会执行回调。
void motor_get_cmd_from_uart(void *pargs){
if(pargs == NULL){
return;
}
uart_mod_t *p = pargs;
if(p->rx_dat_len > 0 && p->rx_dat_len == PACKAGE_SIZE){
if(p->rx_buf[0] == PACKAGE_HEAD
&& p->rx_buf[PACKAGE_SIZE - 1] == PACKAGE_TAIL){
user_cmd_mod.head = p->rx_buf[0];
user_cmd_mod.cmd.value_n[0] = p->rx_buf[1];
user_cmd_mod.cmd.value_n[1] = p->rx_buf[2];
user_cmd_mod.option = p->rx_buf[3];
user_cmd_mod.data.value_n[0] = p->rx_buf[4];
user_cmd_mod.data.value_n[1] = p->rx_buf[5];
user_cmd_mod.data.value_n[2] = p->rx_buf[6];
user_cmd_mod.data.value_n[3] = p->rx_buf[7];
user_cmd_mod.tail = p->rx_buf[PACKAGE_SIZE - 1];
user_cmd_mod.process_flag = 1;
}
}
p->rx_dat_len = 0;
}
int main(void){
usart_init();
usart_set_rx_cbk(&user_uart_mod, motor_get_cmd_from_uart,&user_uart_mod);
}
本文简单介绍了基于STM32基于DMA,利用串口空闲中断进行串口数据接收的具体配置和实现方法,代码基于标准库3.5版本;
因为标准库ST目前已经不再更新,并且ST提供了cubemx工具可以进行基于HAL库和LL库的外设快速配置,从而简化大量工作;当然为了不掉头发感觉撸寄存器也不错,最终适合自己的才是最好的。
免责声明:本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。



为您发布产品,请点击“阅读原文”
