


关于“ 第十九届全国大学生智能汽车竞赛竞速比赛规则[2] ”、“ 视觉组比赛细则[4] ”、“ (竞速组比赛)规则补充说明[3] ”请通过竞赛官网获取,官网网址:http://www.smartcarrace.com/
参赛选手和裁判员需要仔细阅读以上三篇规则文档。
视觉组相比于其他竞速组在比赛流程和裁判员判罚上有着更多的细节和不同的判罚标准,本文结合赛题细则要求和近期收到的同学们的疑问和建议进行编写,供参赛同学和智能视觉组裁判员、场地布置志愿者使用。
今年视觉组的场地准备相比前两年的视觉组也简单了不少,只需要在铺设好的视觉组PVC赛道场地对应区域按要求做好四种放置区的标识,分别是:
具体铺设方法请参考“ 视觉组比赛细则[5] ”。
各分赛区可根据该组别报名队伍的数量、比赛内容和场地安排会采用两种方式组织比赛:
除此之外,如果在第一天的预赛过程中,出现较大范围车模无法完成预赛,决赛队伍数量非常少,则可以取消原定的决赛环节,重新进行依次预赛过程。取两次预赛成绩最好的作为最终比赛成绩。
各分赛区根据该赛题组队伍数量、比赛场地条件以及比赛完成情况,对预赛轮次、调试环节进行合理安排:
1、 预赛轮次:预赛轮次可以安排一次或者两次。如果赛题组参赛队伍比较多,可以安排一次预赛。如果赛题组队伍数量比较少,时间足够,可以安排两次预赛,取最好成绩作为预赛成绩。
2、调试环节:根据竞赛承办时间安排,分赛区组委会可以确定是否安排单独的比赛场地适应调试环节。如果安排有场地适应调试环节,预赛中每个队伍比赛时间长度可以限定在 5分钟至15分钟之内。如果不安排单独的调试环节,可以安排每支队伍在预赛环节现场比赛的时间适当延长。
在分赛区(省赛区)比赛中,还可能存在补赛环节。补赛是针对在赛区现场比赛的车模作品,没有能够完成预赛任务的队伍而设置的。比赛车模作品由于存在现场无法解决的硬软件技术问题,无法适应现场比赛场地要求完成预赛比赛任务。分赛区组委会可以在预赛结束之后组织补赛环节,适当降低比赛任务要求,着重考察参赛车模作品的基本功能是否满足赛题任务需求。对于完成补赛任务的车模可以获得分赛区比赛的“优胜奖”。
补赛流程可以分为以下两种模式。各个分赛区组委会可以根据现场实际情况确定补赛流程。
单独补赛流程:在预赛结束之后单独针对预赛没有成绩的车模组织的补赛流程。根据不同比赛组别,在赛道元素、比赛任务、比赛标准方面进行简化,制定统一补赛标准。对于完成补赛标准的车模认定为补赛合格。这种模式好处是不影响正常的预赛流程;但需要额外安排比赛时间。
预赛过程记录:这种补赛模式要求在预赛过程中记录参赛队伍的车模作品所完成赛道元素的情况进行记录。举个例子:对于视觉组比赛,车模能从起跑线出发,并完成一定数量的散落图片发现并拾取,这属于能完成最基本的任务;如果能对拾取的散落图片进行分类搬运放置,这属于能完成分大类任务;如果能完成十字区域或圆环区域的图片发现和分类搬运放置,这属于能完成分小类任务;可以通过完成任务的层级和正确分类图片的数量来进行排序。虽然车模没有完成预赛整体要求,竞赛组委会将会根据预赛过程中车模所完成任务的多少,统一制定补赛完成标准。对于完成补赛标准的车模认定为补赛合格,并根据完成情况进行排序。
1、 各个赛区根据该赛题组的报名队伍数量、比赛场地数量,规定该赛题组预赛和决赛每支队伍在现场比赛时间长度。因视觉组的任务相对复杂,单次发车比赛耗时较长,单次发车完成比赛后还存在裁判核对本次图片搬运结果统计和下一次比赛的图片摆放工作,所以每支队伍所需比赛时间较长,建议各分赛区(省赛区)比赛中,视觉组的比赛时间设定为至少20分钟,如果该赛区的视觉组队伍数少,比赛时间还可继续加长,但应不超过30分钟;具体比赛时间长度将会在现场报道之后领队会上进行公布。参赛队伍车模成绩需要在比赛规定时间内获得。如果比赛车模出发之后,比赛规定时间到,则本次比赛成绩无效。
2、 满足以下三种情况之一,比赛结束:
比赛过程中不再单独安排车模维修过程。
为了考察参赛车模作品的软件和硬件的完整性以及赛场的自主适应性,要求参赛车模在比赛过程中自主独立完成比赛,小车发出后不允许以任何形式干预小车运行,小车发出后发车选手应在原地,不能跟车。
因视觉组任务变化较多,在预赛和决赛的过程中,参赛队伍在给定的时间内。允许参赛队伍现场对车模进行软件调试和代码下载,也可以通过车模的人机界面对车模运行参数进行修改。
注: 参赛队伍入场之后,允许携带一条用于清理车模轮胎的毛巾。在比赛过程中,不允许将毛巾铺设在赛场地面上。
本次各分赛区比赛视觉组预赛和决赛的赛道不变,预赛和决赛的区别从图片内容和数量来进行区分,预赛和决赛采用的图片均从公布的数据集中选取,各赛区图片内容均不相同,每个赛区共18张,其中预赛使用图片总数量12张,决赛使用图片总数量18张。若该赛区无决赛,进行两轮预赛,或只进行一轮比赛,可以将两轮预赛或仅一轮的比赛的图片数量直接采用18张。
赛前,每个散落图片点位置未知,每个散落点的图片内容由裁判现场随机选取,图片堆的图片内容和堆叠顺序由现场裁判随机打乱进行放置。数字区顺序和字母区顺序也是由裁判现场打乱随机放置。
在视觉组比赛过程中,裁判员是保证比赛顺利进行、准确获得车模成绩、对于比赛违规进行正确判罚的重要保证。下面给出视觉组现场裁判分工和职责描述。由于比赛过程涉及到比赛流程控制、比赛计时系统操作与成绩录入、车模检验等,需要多名裁判配合工作。现场裁判员按照职责分工如下:
主裁判:一名,负责与参赛队员沟通,对比赛情况进行判罚,对比赛流程进行控制。具体的操作流程见后面“比赛流程” 部分的内容。
比赛辅助裁判4人:4名辅助裁判和主裁一起配合完成图片按要求摆放及核对小车搬运是否正确、是否搬到框内的工作,5名裁判均需要提前清楚图片的分类要求。为了让裁判的工作简单流畅,对4名辅助裁判进行分工,各裁判只判断自己负责的内容,避免记混淆出错。
A裁判负责圆环处的目标图片摆放、核对;
B裁判负责圆环与十字处的字母图片的摆放;
C裁判负责数字图片和散落图片的摆放、核对;
D裁判负责十字处的目标图片摆放、核对;
摆放流程要求:选手正式发车前,示意主裁,主裁示意4名辅助裁判按要求摆放图片,摆放好堆叠图片、字母图片、散落图片及数字图片后,选手正式发车。为避免选手提前输入图片摆放信息,摆好图片后,选手只能按一次小车上的按键发车,避免通过按键输入位置和数字、字母的对应信息,请参赛选手提前做好相关程序设置准备。堆叠图片因为是整齐堆叠在一起成堆摆放的,若搬运途中小车将还未识别和搬运的图片撞乱了或偏离了,需小车继续自行完成,所以需要小车自行考虑好搬运策略,避免将图片堆撞乱;
图片核对要求:除了按正常字母和数字对应的大小类进行核对外,裁判还需要注意小车是否把圆环区域或者十字区域的分小类图片带到了分大类的数字区进行放置,这样即便分对了大类也是搬运错误;同样,把散落图片放置到分小类的字母区域也属于搬运错误;将十字区域的图片带到圆环区分类以及将圆环区域的图片带到十字区域分类都属于搬运错误;所以需要各分工裁判在核对时判断是否有交叉错误,组委会也会在提供的图片背面标注好图片属于哪个区域,便于判断交叉错误,出现交叉错误时也便于重新清理出来供再次使用。
比赛系统操作员 :1-2人,负责比赛裁判计时系统的操作。计时系统使用培训资料请参见在比赛系统相关说用说明和视频讲解。在比赛过程中,和主裁判配合,完成比赛过程中的比赛系统软件、硬件的操作以及有效成绩的记录(如果人员较充足,建议安排1人负责操作裁判计时系统,1人负责手动记录有效成绩)。
比赛系统操作员的职责还包括:
(1) 负责召集下一支参赛队伍能够提前在比赛现场进行候场;
(2) 负责对进入场地前的队伍车模进行检查:车模尺寸检查、轮胎粘性检查、检查是否配有计时器触发磁标等。详细参见“车模检查文档”。
(3) 负责对于比赛完毕的队伍进行成绩签字确认,并要求参赛队伍将车模送回车模展示区。
(4) 帮助参赛队伍确认,在比赛车模上安装有触发计时系统的磁铁。如果没有安装,且车模不能触发计时器,可以使用裁判系统中备用的磁铁给参赛队伍临时补上。
请主裁判召集下一支参赛队伍,并提前进行车模的检查,车模检查方法参见后面的车模检查办法。辅助裁判此时可以提前与现场分管检录的志愿者让更多的队伍能够提前在赛场附近的调试场地进行准备。
下面给出视觉组车模检查中几个特别注意的事项:
(1) 根据竞赛规则,检查车模上的MCU是否属于NXP公司的MCU。
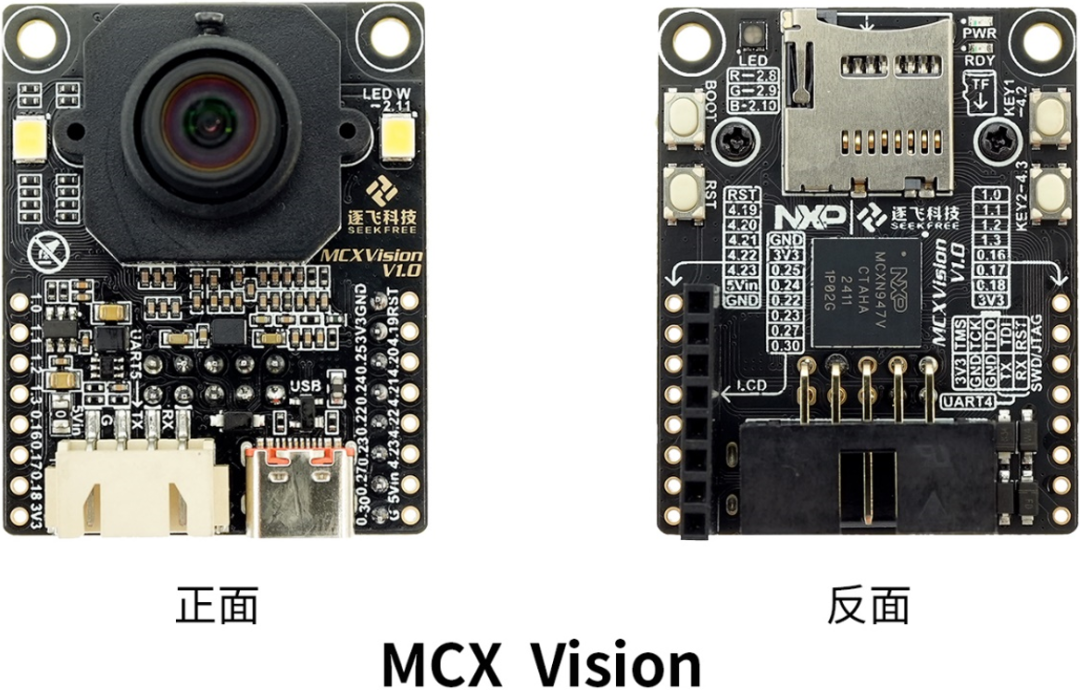
(2) 根据竞赛规则,检查车模上的图像处理平台是否是使用的基于NXP公司微控制器的OpenART、MCXVision(基于MCX系列MCU的新版视觉模块)。可参考如下图片进行核对。

(3) 所使用的成品IMU 模块、摄像头模块及其他成品传感器不允许使用带有 MCU 的成品模块。自制模块中的MCU则需要使用组别限定的MCU种类。
请现在已经在比赛现场的队伍,并且已经进行了车模检查,进入比赛场地准备比赛。进入比赛场地前,并请比赛系统操作裁判在比赛系统中调入当前参赛队伍信息。请参赛队员确认比赛信息,信息确认无误后,按下信息确认按键,选手进入场地,比赛倒计时开始,参赛队伍的队员都可以进入赛场,辅助完成现场的车模调试。
比赛采用实行限时与限次数的比赛方式。也就是在给定的比赛时间范围内(比如20分钟),参赛队伍在比赛场地内完成车模的准备,调试,比赛。每支队伍在场地内比赛时间是由竞赛组委会根据场地数量、参赛队伍数量进行分配。在调试阶段,车模发车次数不限,比赛系统不进行正式计时。正式发车前,请选手在裁判摆好图片并得到允许发车的示意后,先按下计时按键,再按一次自己小车的发车按键,小车自动发出,本次比赛为有效的正式计时。
在给定时间内,队伍车模按照组别任务完成比赛。当车模获得三次有效成绩之后,比赛结束。最终成绩取比赛有效成绩中最优成绩。
在现场预赛、决赛比赛过程中,参赛队伍可以携带必要的调试工具(包括电脑、以及其他硬件)现场完成对于车模的调试。每支队伍只能使用一台车模作品完成比赛,禁止携带多辆车模参加比赛。
在比赛时,队员进入场地后,便开始限时计时。在车模调试阶段,允许参赛队伍中所有队员进行现场对比赛场地、车模作品进行共同维护。当比赛选手要求进行比赛计时时,请除了发车之外的其他队员离开场地,发车队员将车模带到发车区准备。正式发车后只留发车手一人在场地内,且发车手不能跟随走动,只能留在原地,避免遮挡裁判及录像视线。
请比赛系统操作裁判提醒发车手正式发车前按下白色计时按键,并示意队员可以发车。车模完成运行后,对于车模是否完成比赛以及相应的罚秒按主裁判指示进行记录。具体的判罚标准参见后面判罚标准。将比赛结果告知电脑操作员进行记录和保存。
在比赛过程中如果出现了一些参赛队伍不可克服的原因造成比赛时间耽搁,则应该按照耽搁的时长进行比赛补时:
在视觉组的比赛中,车模需要按赛道指定的方向发车,不能反向发车。
不要求车模自动停车,也不要求停车范围,小车完成图片分类任务后,能从斑马线上通过让计时器停止即可。
视觉组车模不存在出界判罚,赛道只有引导小车找到散落图片和图片堆的作用,所以不用判罚小车是否出界,不用管小车是否按赛道行进方向前进,也不用管小车自己的车轮或车体把图片位置撞乱。一旦出发,一切都交给小车,只需要判断搬运到放置区内的图片结果是否正确。在视觉组的细则里面说明分赛区要完成散落图片的60%才算完赛,不允许小车只完成少量识别和搬运就直接回到起跑线的比赛方式,但如果小车散落图片拾取较少,未能达到60%,但图片堆叠区分小类搬运又完成了超过60%,按规则也是没有成绩的。但这样并不合理,所以修订为至少完成散落图片的60%或至少完成堆叠图片的60%并能回到起跑完成计时都算完赛。
如果在搬运图片的过程中,尤其在1、2、3三个大类区域放置图片时,因为小车动作过度,误将计时器触发停止,则本次比赛直接结束,还未进行分类的图片算作遗漏进行加罚;
关于车模检查、违规处理等竞速组的统一规范,请参考竞速组的“裁判员手册”相关章节。
全国大学生智能汽车竞赛网站: http://www.smartcarrace.com/
[2]第十九届全国大学生智能汽车竞速比赛规则: https://zhuoqing.blog.csdn.net/article/details/134331321
[3]第十九届全国大学生智能汽车竞赛(竞速组比赛)规则补充说明: https://zhuoqing.blog.csdn.net/article/details/138366291
[4]第十九届全国大学生智能汽车竞赛 视觉组比赛细则: https://zhuoqing.blog.csdn.net/article/details/134612755
[5]视觉组比赛细则: https://blog.csdn.net/zhuoqingjoking97298/article/details/134612755
