

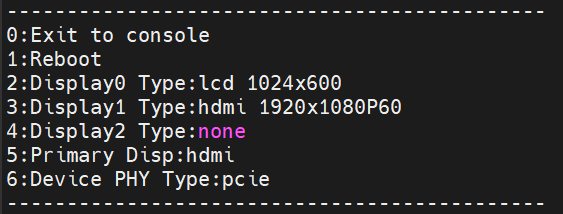
飞凌OK-T527开发板板子很漂亮,外设丰富,且性能强悍,有趣的是,给板子上电,按任意键进入U-Boot会自动列出一个功能菜单,有切换屏幕等功能,基于此功能特性,本文将分析如何在U-Boot添加自定义菜单。

实验环境介绍
本文主要分析U-Boot在程序中的执行顺序,又如何在U-Boot阶段调起菜单?相信大家都试过,在U-Boot倒数结束前按任意按键后,会进入U-Boot命令行模式。
01
硬件:飞凌OK-T527开发板
02
软件:全志Longan SDK(U-Boot版本2018)
03
说明:本次实验不限制平台,请参考实际情况阅读。
这里先留一个问题:如何做到按键按下后,调启的是自己的U-Boot菜单,而不再是进入命令行模式?
U-Boot如何自动调起菜单
U-Boot的入口程序文件是/common/main.c,入口函数main_loop():
/*/common/main.c */ .../* We come here after U-Boot is initialised and ready to process commands *//* 在U-Boot初始化并准备好处理命令之后,我们来到这里。*/void main_loop(void){const char *s;bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");env_set("ver", version_string); /* set version variable */cli_init(); //命令初始化有关,初始化 hush shell 相关的变量run_preboot_environment_command(); //获取环境变量 perboot 的内容update_tftp(0UL, NULL, NULL);s = bootdelay_process(); //此函数会读取环境变量 bootdelay 和 bootcmd 的内容if (cli_process_fdt(&s))cli_secure_boot_cmd(s);autoboot_command(s); //开启倒计时,并在倒计时结束前检测是否有按键按下cli_loop(); //命令行处理函数(即进入U-Boot命令行)panic("No CLI available");}
关键函数是autoboot_command(),该函数的实现在/common/autoboot.c,进入 autoboot_command() 后,先看第一个if:
https://www.yuque.comvoid autoboot_command(const char *s){...if (stored_bootdelay != -1 && s && !abortboot(stored_bootdelay))...}/flose-kgkgb/yxurbe/nbdi5d1cd63zg5r6?singleDoc#
这里有三个条件:
● stored_bootdelay != -1
stored_bootdelay是倒数的总时间,就是常见的3秒、5秒不等;
● s:传进来的参数s不能为空;
● !abortboot(stored_bootdelay):该函数会从stored_bootdelay开始倒计时,期间判断是否有按键按下。函数实现如下,倒计时过程中若检测到按键按下,则令abort=1。无按键按下,则abort=0。最后返回abort。
刚刚说了,abortboot() 函数执行期间有按键按下的话,abortboot() 会返回1,那就不会进入第一个if,程序会接着往下运行直至该函数运行结束。autoboot_command() 结束后继续返回到main_loop(),随后立刻执行cli_loop(),进入我们所熟悉的U-Boot命令行模式。
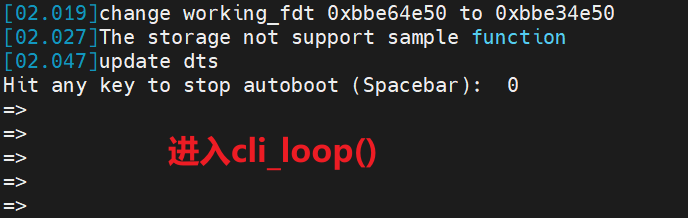
至此,就实现了U-Boot倒数期间,有按键按下,则进入U-Boot的命令行模式,现在继续回到第一个if:
/*/common/autoboot.c */ void autoboot_command(const char *s){...if (stored_bootdelay != -1 && s && !abortboot(stored_bootdelay)) { // 倒计时过程中,没有按键按下int prev = disable_ctrlc(1); /* disable Control C checking */run_command_list(s, -1, 0); // 倒计时结束后,启动内核disable_ctrlc(prev); /* restore Control C checking */}...}
如果在autoboot倒计时结束前,一直没有按键按下呢?那 abortboot() 最后会返回0,第一个if的三个条件全部满足。进入if,run_command_list() 执行一系列命令后,启动内核。注意,这里的现象是直接启动内核,run_command_list() 后的程序不再执行。
解析到这里,我们得出一个结论:在autoboot倒计时中,如果有按键按下的话,会进入U-Boot的命令行模式。无按键按下则在倒计时结束后直接启动内核。
那现在可以回答第一个问题,如何做到按下按键后,是自启动U-Boot菜单,而不是进入U-Boot命令行呢?答案是在执行cli_loop()之前,我们可以在autoboot检测到按键按下后,调用run_command()函数执行menu命令,从而调起菜单。
void autoboot_command(const char *s){debug("### main_loop: bootcmd=\"%s\"\n", s ? s : "" );if (stored_bootdelay != -1 && s && !abortboot(stored_bootdelay)) {int prev = disable_ctrlc(1); /* disable Control C checking */run_command_list(s, -1, 0);disable_ctrlc(prev); /* restore Control C checking */}//在此处启动菜单run_command("menu", 0);if (menukey == CONFIG_MENUKEY) {s = env_get("menucmd");if (s)run_command_list(s, -1, 0);}}
U-Boot添加自定义命令
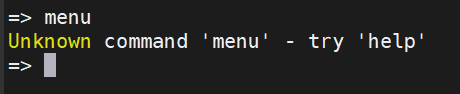
难道通过 run_command() 执行menu命令后,菜单就自己出来了?这是一个理所当然的猜想。实际上U-Boot根本不认识menu命令:
先看最底下的U_BOOT_CMD,这是一个宏,用来添加U-Boot命令:
/*/include/command.h */ U_BOOT_CMD_COMPLETE(_name, _maxargs, _rep, _cmd, _usage, _help, NULL)
● _name:命令的名字
● _maxargs:添加的命令最多有几个参数
● _rep:是否重复(1重复,0不重复),指在U-Boot命令行按下Enter键的时候,重复执行上次的命令
● _cmd:执行函数(即执行该命令后,运行哪个函数)
● _usage:短帮助信息
● _help:长帮助信息
再来看看执行函数do_brightness的声明:
int (*cmd)(struct cmd_tbl_s *cmdtp, int flag, int argc, char *const argv[]);● cmdtp:Table entry describing the command (see above).
● flag:A bitmap which may contain the following bit
● argc:执行命令时,传入的参数数量
● argv:传入的参数
实践
下面,添加一个U-Boot菜单,不过只作打印,没有实际功,在 /drivers 下创建一个名为mymenu的文件夹:

在mymenu文件夹下创建mymenu.c,内容如下:
static int do_mymenu(struct cmd_tbl_s *cmdtp, int flag, int argc, char *const argv[]){printf("\n======== Title ========\n");printf("== [1] xxxxxx\n");printf("== [2] xxxxxx\n");printf("== [3] xxxxxx\n");printf("== [4] xxxxxx\n");printf("=========================\n\n");return 0;}U_BOOT_CMD(menu, 1, 1, do_mymenu,"here is uboot menu\n","here is uboot menu, make in 2024-06-27\n");
还需在mymenu文件夹下创建一个Makefile文件,内容如下:
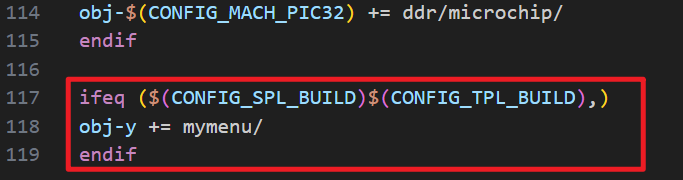
int (*cmd)(struct cmd_tbl_s *cmdtp, int flag, int argc, char *const argv[]);最后修改 /drivers/ 下的Makefile,在结尾加上如下内容,表示要编译mymenu路径下的文件:
ifeq ($(CONFIG_SPL_BUILD)$(CONFIG_TPL_BUILD),)obj-y += mymenu/endif
编译U-Boot,更新U-Boot,重启单板,在U-Boot倒计时结束前,按任意按键就进入我们自定义的菜单:
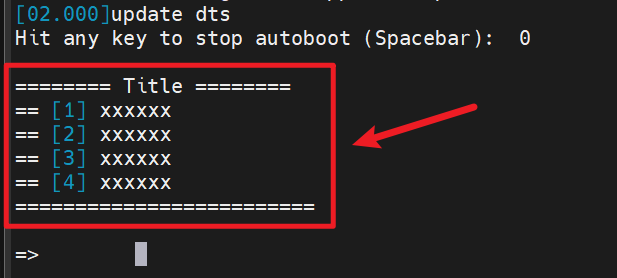
剩下的菜单程序编写就是根据实际功能来开发了。
-End-
本文内容均转载自以下链接
1.https://bbs.aw-ol.com/topic/5524
