点击蓝字关注,点赞转发本文,私信作者领取用户手册和源代码
*********************************************
除了各位小伙伴特别熟悉的滑模SMO之外,龙伯格观测器是一种通用方法,用于在已知输入和输出时确定线性系统的内部状态。
在国内的无位置传感器控制应用上,龙伯格也被广泛应用,计算比SMO稍微复杂点。
本文介绍Microchio使用的降阶龙伯格观测器。
下图为降阶龙伯格观测器的系统框图:
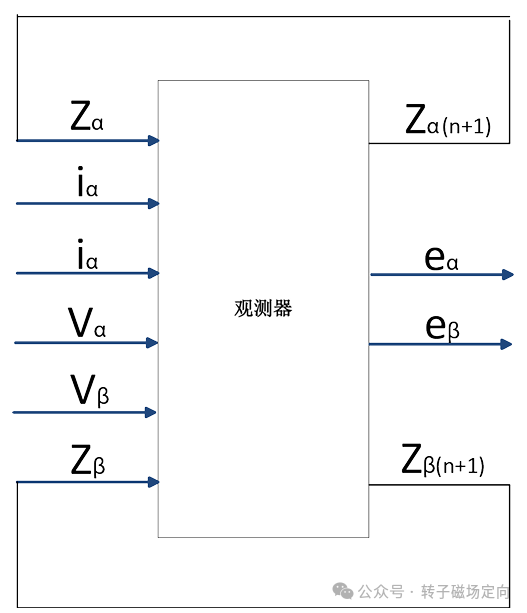
离散化过程如下:
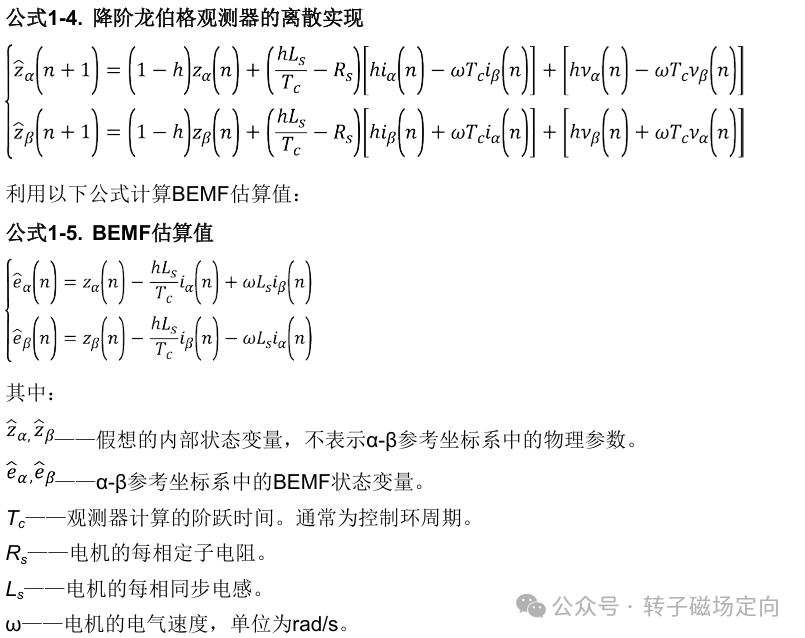
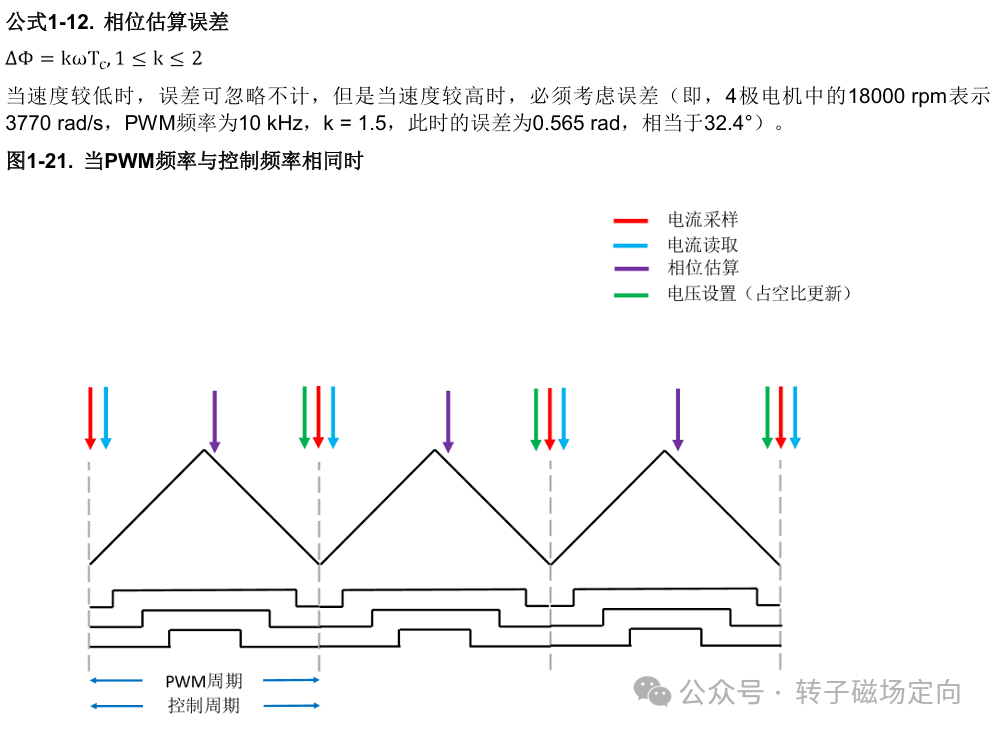
观测器还要考虑离散生效导致的电角度误差:
除了文档,Microchip开源了龙伯格源码。
关注公众号,点赞转发到朋友圈,私信作者领取源代码和用户手册。
注意:Microchip阅读代码有其专用的IDE MPLAB,不是MATLAB,注意是MPLAB。原厂代码不是keil格式,必须去microchip官网下载IDE,安装后阅读代码。
*********************************************
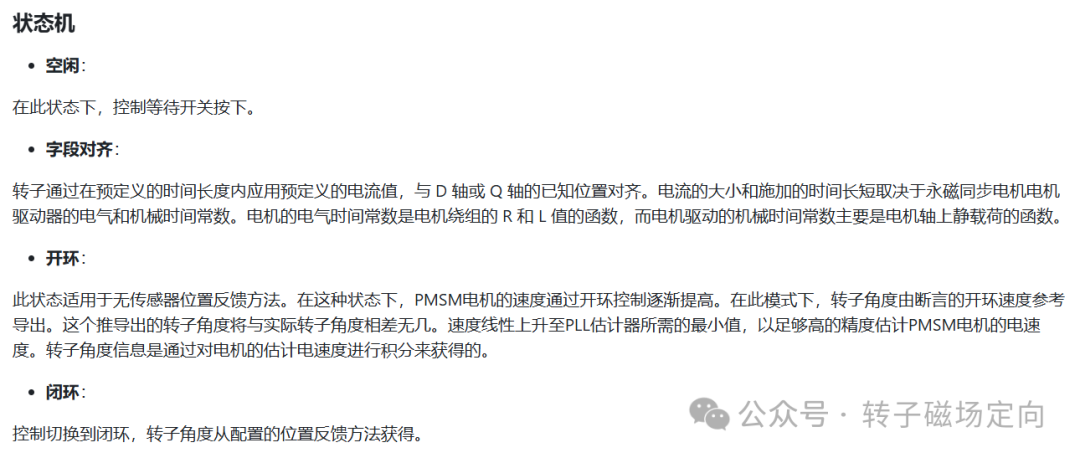
源码工程包含以下状态机:
源码文件功能定义:
控制库:
mc_userparameters.h 包含用户配置。
mc_pmsm_foc.c/h - PMSM FOC 算法接口文件
mc_function_coordinator.c - 初始化和协调电机控制、ISR 和慢速任务进程
mc_error_handler.c - PWM故障ISR对过流采取纠正措施
mc_motor_control.c/h - 实现电机控制状态机。
mc_start_up.c/h - 实现初始现场对齐和开环启动配置文件。
mc_speed_control.c/h - 计算和调节参考速度
mc_current_control.c/h - 控制直流和正交轴电流
mc_rotor_position.c/.h - 计算转子的位置和速度
mc_voltage_measurement.c/h - 获取直流母线电压
mc_current_measurement.c/h - 获取电机相电流
mc_interface_handling.c/h - 管理全局变量和数据类型
mc_generic_library.c/h - FOC 库
mc_pwm.c/h - 空间矢量调制 (SVM) 和更新 PWM 占空比
mc_ramp_profiler.c/h - 用户输入的速度参考配置文件
mc_hardware_abstraction.c/h - 用于与 PLIB 交互的硬件抽象层
*********************************************
本人推出的转子磁场定向基础班课程正式上线,相比于传统培训机构,刘工最大的优势是15年来一直从事一线项目开发,工程经验丰富。主张理论结合实践,视频课程长期有效,持续答疑。
配套开发板和电机,手把手指导调试,方便移植,将整个FOC知识形成体系。
详情添加微信:PMSM_RFO或者淘宝搜索店铺:转子磁场定向


