动动手指,关注公众号并加星标哦

(1) 单脉冲雷达波形的时域和频域

在文献[1]中常用雷达波形的介绍中,第一个是连续波雷达波形,第二个就是单脉冲雷达波形。
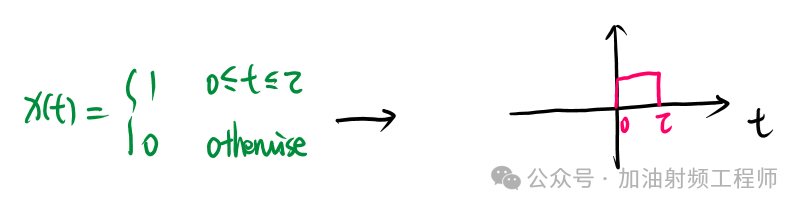
单脉冲雷达波形的时域表达式和波形,如下图所示。
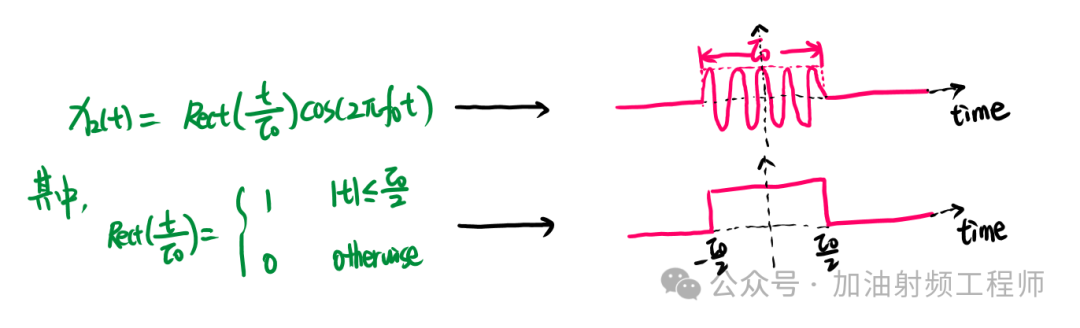
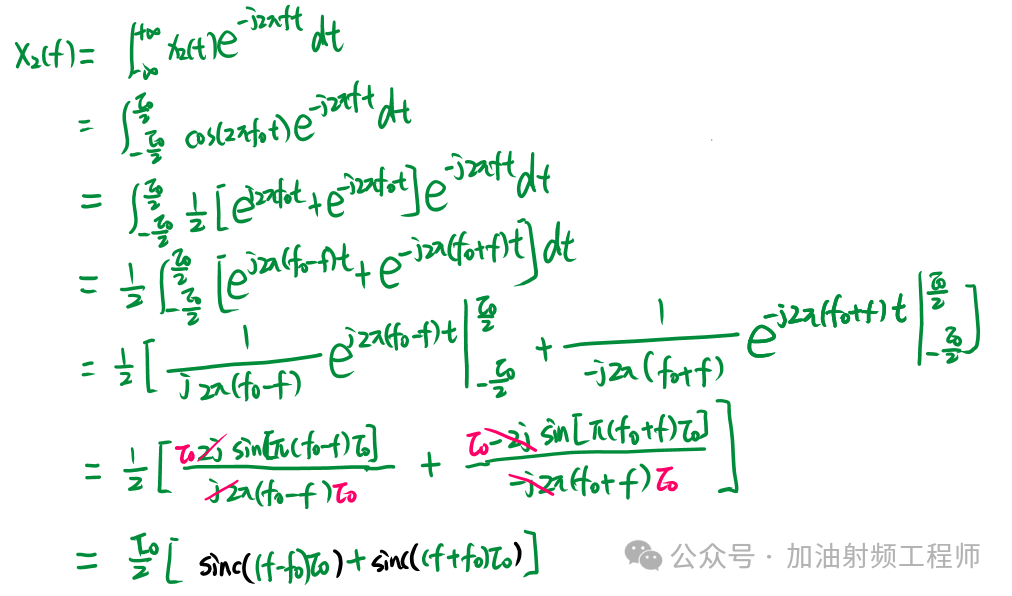
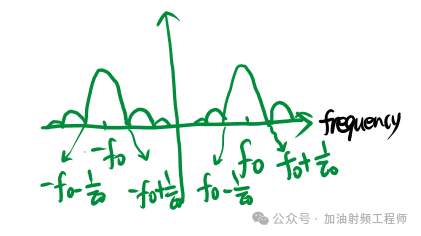
单脉冲雷达波形的频域表达式和波形,如下图所示。
(2)单脉冲波形,经过匹配滤波器后的输出
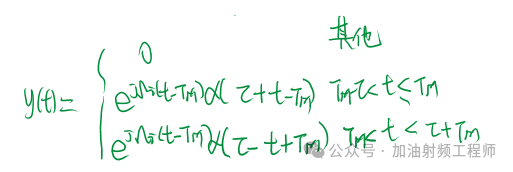
为了和后续仿真能够对应上,单脉冲波形使用文献[2]所写的,也就是把上面的单脉冲波形,延时τ/2,使得波形从t=0开始有值。
我理解,匹配滤波器是针对于基带信号,也就是剔除载波解调后的信号。
所以,在[2]中,计算单脉冲雷达波形经过匹配滤波器以后的输出,用的输入波形的表达式和波形如下图所示。
由前面的文章可知,该波形对应的匹配滤波器为:
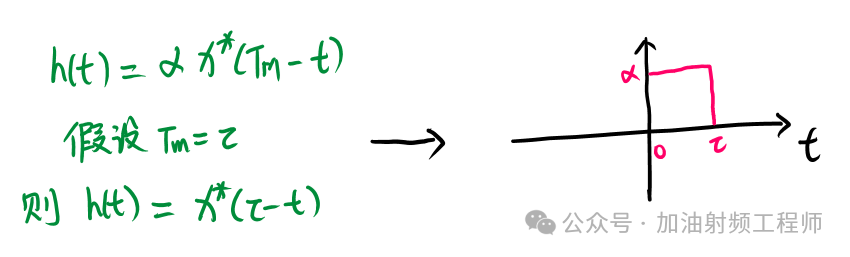
所以,当x(t)输入至单位冲激响应为h(t)的系统时,其输出为:

(3)运动目标返回来的信号经过匹配滤波器后的输出
在文献中[2]中,推导单脉冲雷达波形,对运动目标的响应时,做了两个假设,一个是忽略总的时延,一个是假设Tm=0。
对于第一个假设,我试着不接受,但是看前面的章节中,关于多普勒效应的公式推导,也有好几页,而且初看了一下,懵圈。
所以,就先这样吧。文献[2]出现在SystemVue软件的help文件中N次,再加上书已经是第二版(查了一下,2022年又出了第三版),所以99.99%不会有错。至于,留那么0.01%是想表示一下作为工程师说话的严谨性。
对于第二个假设,还有余力,所以就试着把Tm加上,因为前面的文章说了,为了保证h(t)的因果性,TM需要大于τ,所以还是把Tm加上,感觉心里好受一点。
现在开始推导过程。
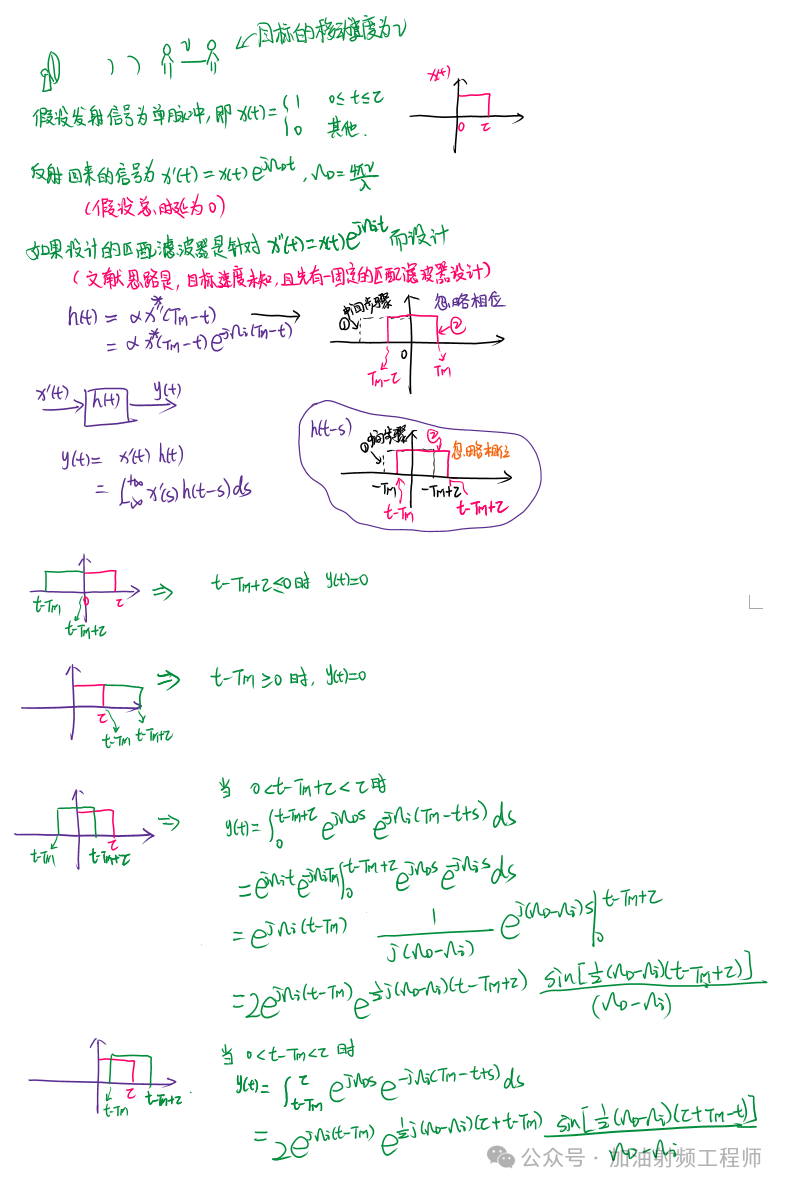
当我推到这的时候,想想,确实应该简化,复杂不一定,但是太繁琐了。公式太繁琐,就看不出里面的道道了。
参考文献[2],勉强基于上述的推导,来看一下吧。
假设Ωi=ΩD,也就是说目标的多普勒频移和匹配滤波器的固定多普勒频移一样,那么可以得到:
也就是说,当t=TM时,y(t)出现最大值。
那如果 Ωi≠ΩD,则:
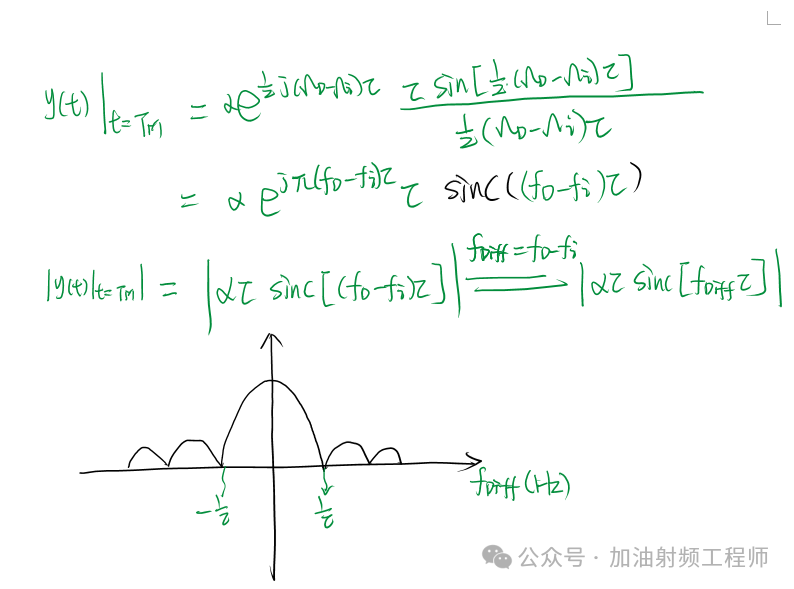
fDIFF是运动目标产生的多普勒频移与匹配滤波器所假设的多普勒频移之差。
从上图可以看出,如果fDIFF=0,那么能y(t)能检测到最大值;但是如果fDIFF>0,那么检测到的值就变小了,如果相差的多,比如1/τ Hz,那直接就检测不到了。
(4) 单脉冲雷达波形,检测运动目标的速度时,好使么?
脉冲雷达的距离分辨率为cτ/2,经过匹配滤波器后的距离分辨率仍然为cτ/2,也就是说τ(脉冲宽度)越窄,距离分辨率越好。
从上图可以看到,单脉冲雷达波形的多普勒分辨率(文献[2]中说的是Rayleigh resolution,我没去探究,这个和resolution有啥区别)是1/τ。
所以,单脉冲雷达波形,想要检测运动目标的速度时好使,那就需要采用比较宽的脉冲宽度τ。
不过,当τ变大时,多普勒分辨率了好,但是距离分辨率变差了。想解决这矛盾的话,就需要使用其他的雷达波形。

参考文献:

[1] Bassem R. Mahafza,Radar Systems Analysis and Design Using MATLAB
[2] Mark A. Richards,Fundamentals of Radar Signal Processing


完结接收机课程吆喝处哈(已在平台上购买的同学,加我微信,领课件资料哈!)
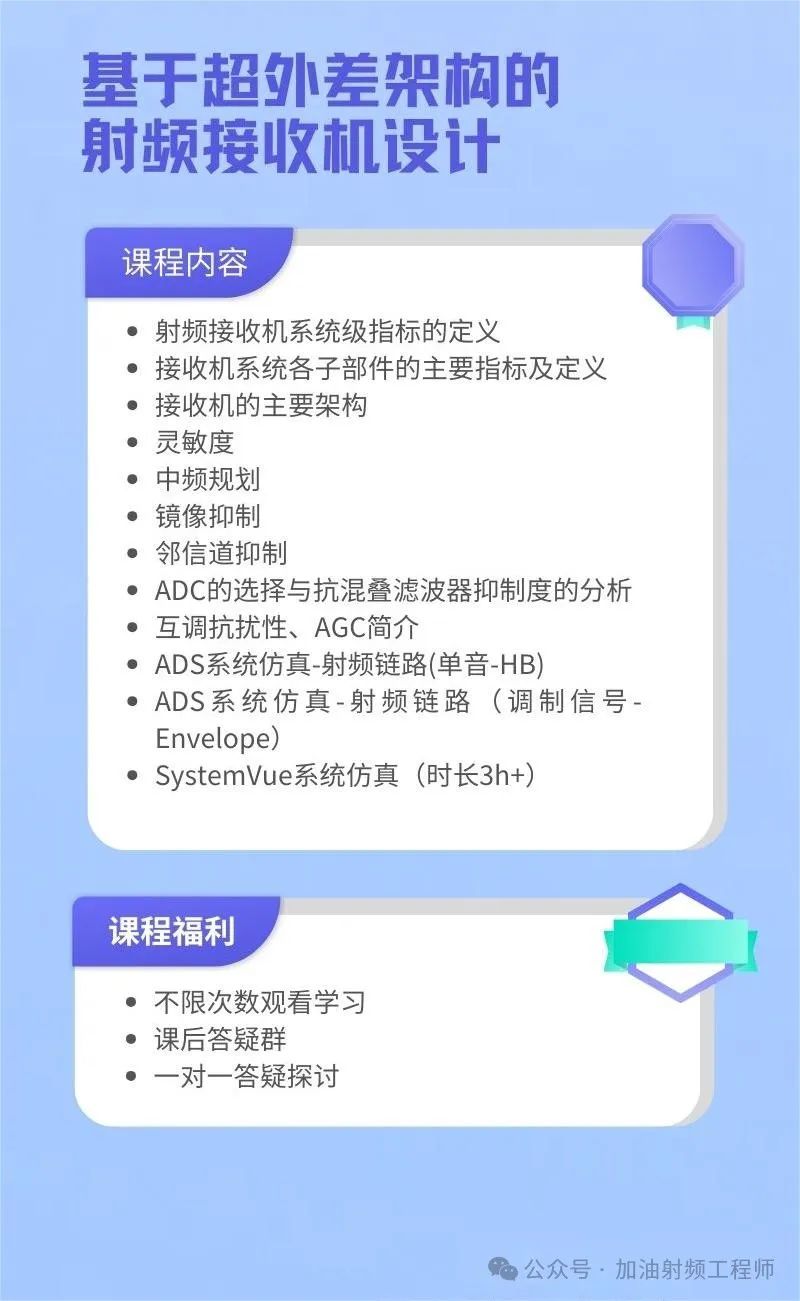
想了解接收机的底层理论知识,可以选择这门课;
想了解ADS的系统仿真,可以选择这门课;
想了解SystemVue的系统仿真,可以选择这门课。
每个分指标的计算后面,都跟着一个仿真验证。所有指标都分配完了以后,还会有一个整体链路的仿真。
整体链路仿真,还分单音时候的验证+调制信号的验证;ADS仿完,再用SystemVue走一遍。
这些仿真步骤,该采用什么模板,各个参数该怎么设置,该用什么等价标准来判断,都是我花了很长时间探索,才联通起来的。
我觉得大概率是全网独一份,因为这些都是我结合软件自带的help文件和模板,再结合项目,一点一点探索出来的,有很多自己的想法在里面。
想报名的同学,可以海报底部扫码哈!
☜左右滑动查看更多
Slide for more photos