
i2c的设备树和驱动是如何匹配以及何时调用probe的?粉丝手里的I2C外设是ov5640,一个摄像头。粉丝提问,一口君必须安排。
设备树信息如下:
ov5640: ov5640@3c {
compatible = "ovti,ov5640";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_csi1
&csi_pwn_rst>;
clocks = <&clks IMX6UL_CLK_CSI>;
clock-names = "csi_mclk";
pwn-gpios = <&gpio1 4 1>;
rst-gpios = <&gpio1 2 0>;
csi_id = <0>;
mclk = <24000000>;
mclk_source = <0>;
status = "okay";
port {
ov5640_ep: endpoint {
remote-endpoint = <&csi1_ep>;
};
};
};
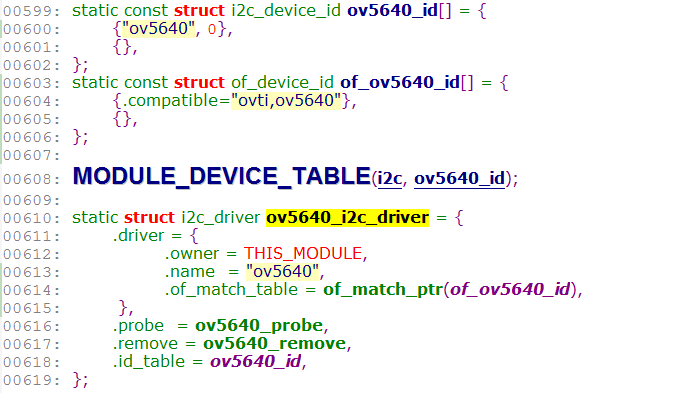
驱动最重要的结构体如下:
要搞懂这个问题,我们需要有一些基础知识:
Linux内核维护很多总线,platform、usb、i2c、spi、pci等等,这个总线的架构在内核中都支持的很完善,内核通过以下结构体来维护总线:
struct bus_type {
const char *name;
const char *dev_name;
struct device *dev_root;
struct device_attribute *dev_attrs; /* use dev_groups instead */
const struct attribute_group **bus_groups;
const struct attribute_group **dev_groups;
const struct attribute_group **drv_groups;
int (*match)(struct device *dev, struct device_driver *drv);
int (*uevent)(struct device *dev, struct kobj_uevent_env *env);
int (*probe)(struct device *dev);
int (*remove)(struct device *dev);
void (*shutdown)(struct device *dev);
int (*online)(struct device *dev);
int (*offline)(struct device *dev);
int (*suspend)(struct device *dev, pm_message_t state);
int (*resume)(struct device *dev);
const struct dev_pm_ops *pm;
struct iommu_ops *iommu_ops;
struct subsys_private *p;
struct lock_class_key lock_key;
};
i2c对应总线结构体变量为i2c_bus_type,定义如下:
drivers/i2c/I2c-core.c
struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
.pm = &i2c_device_pm_ops,
};
其中:
该结构体变量在函数i2c_init()中初始化:
static int __init i2c_init(void)
{
…………
retval = bus_register(&i2c_bus_type);
…………
}
i2c架构是通用架构,可支持多种不同的i2c控制器驱动。
不论哪一种总线,一定会维护两个链表,一个是驱动链表,一个是硬件信息链表。链表如下: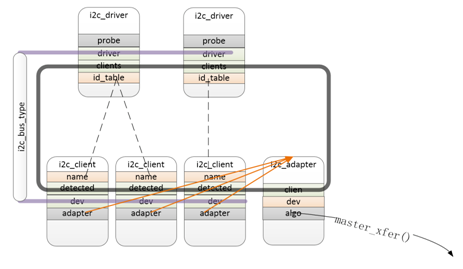
i2c总线的两个节点信息如下:
「struct i2c_driver」
struct i2c_driver {
unsigned int class;
/* Notifies the driver that a new bus has appeared. You should avoid
* using this, it will be removed in a near future.
*/
int (*attach_adapter)(struct i2c_adapter *) __deprecated;
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *, pm_message_t mesg);
int (*resume)(struct i2c_client *);
/* Alert callback, for example for the SMBus alert protocol.
* The format and meaning of the data value depends on the protocol.
* For the SMBus alert protocol, there is a single bit of data passed
* as the alert response's low bit ("event flag").
*/
void (*alert)(struct i2c_client *, unsigned int data);
/* a ioctl like command that can be used to perform specific functions
* with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
};
「struct i2c_client」
| 成员 | 含义 |
|---|---|
| unsigned short flags | 从设备地址长度 |
| unsigned short addr | 从设备地址 |
| char name[I2C_NAME_SIZE] | 从设备地址名称 |
| struct i2c_adapter *adapter | 从设备地址对应的控制器驱动地址 |
| struct device dev | 注册到内核的每一个设备模块都需要先定义一个该结构体变量,对应struct device_driver driver |
| int irq | 从设备地址往往会有一根中断线连接到SOC的中断控制器 |
| struct list_head detected | 链表 |
i2c_driver结构需要我们自己定义,然后通过函数i2c_register_driver()注册,将该结构体变量注册到i2c_driver链表,同时从i2c_client链表中查找是否有匹配的节点:
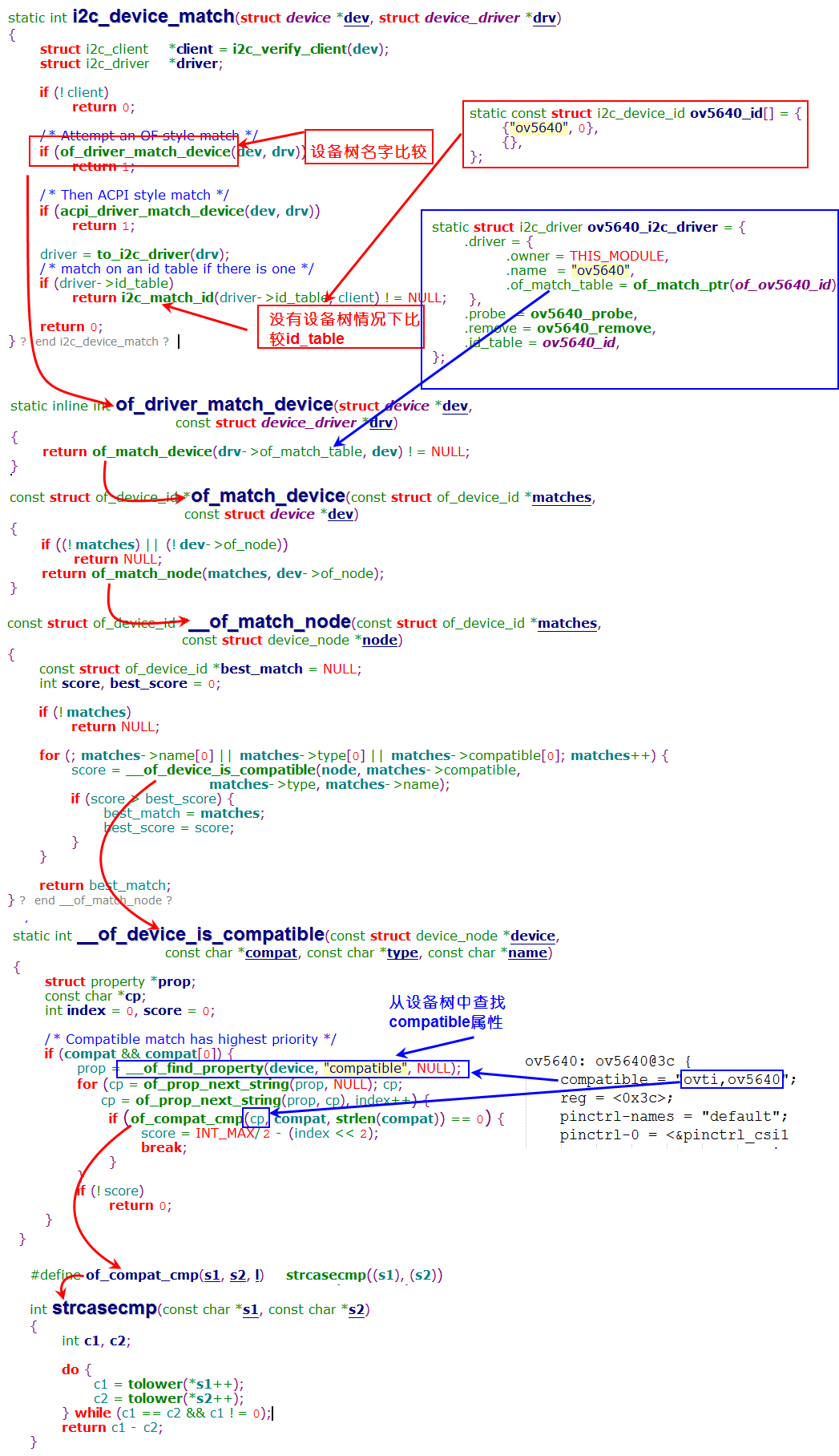
设备树情况下,会比较i2c_drive->driver->of_match_table->compatible和i2c_client->name,对应例子中的of_ov5640_id:
非设备树比较i2c_drive->id_table->name和i2c_client->name,对应例子中的ov5640_id:
代码中并没有直接调用函数i2c_register_driver()注册,而是使用了下面的这个宏: 该宏定义如下:
该宏定义如下:
include/linux/I2c.h

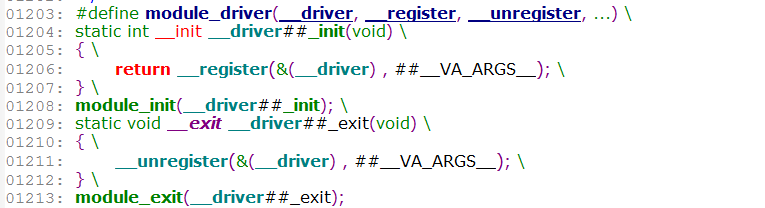
该宏其实自动帮我生成了insmod和rmmod会用到宏module_init和module_exit,以及注册和注销i2c_driver结构体的代码。
如果看不明白宏,可以编写测试文件:test.c
#define module_i2c_driver(__i2c_driver) \
module_driver(__i2c_driver, i2c_add_driver, \
i2c_del_driver)
#define module_driver(__driver, __register, __unregister, ...) \
static int __init __driver##_init(void) \
{ \
return __register(&(__driver) , ##__VA_ARGS__); \
} \
module_init(__driver##_init); \
static void __exit __driver##_exit(void) \
{ \
__unregister(&(__driver) , ##__VA_ARGS__); \
} \
module_exit(__driver##_exit);
module_i2c_drive(ov5640_i2c_driver);
预编译:
gcc -E test.c
得到宏替换后的结果:
static int __init ov5640_i2c_driver_init(void)
{
return i2c_add_driver(&(ov5640_i2c_driver));
}
module_init(ov5640_i2c_driver_init);
static void __exit ov5640_i2c_driver_exit(void)
{
i2c_del_driver(&(ov5640_i2c_driver));
}
module_exit(ov5640_i2c_driver_exit);;
内核中有大量的高效简洁的宏定义,Linux内核就是个宝库,里面有大量的优秀的代码,想提高自己的编程能力,就一定要多看代码,代码读百遍,其义自见。
一口君认为,如果Linux代码都看不太明白,就不要自称精通C语言,充其量是会用C语言。
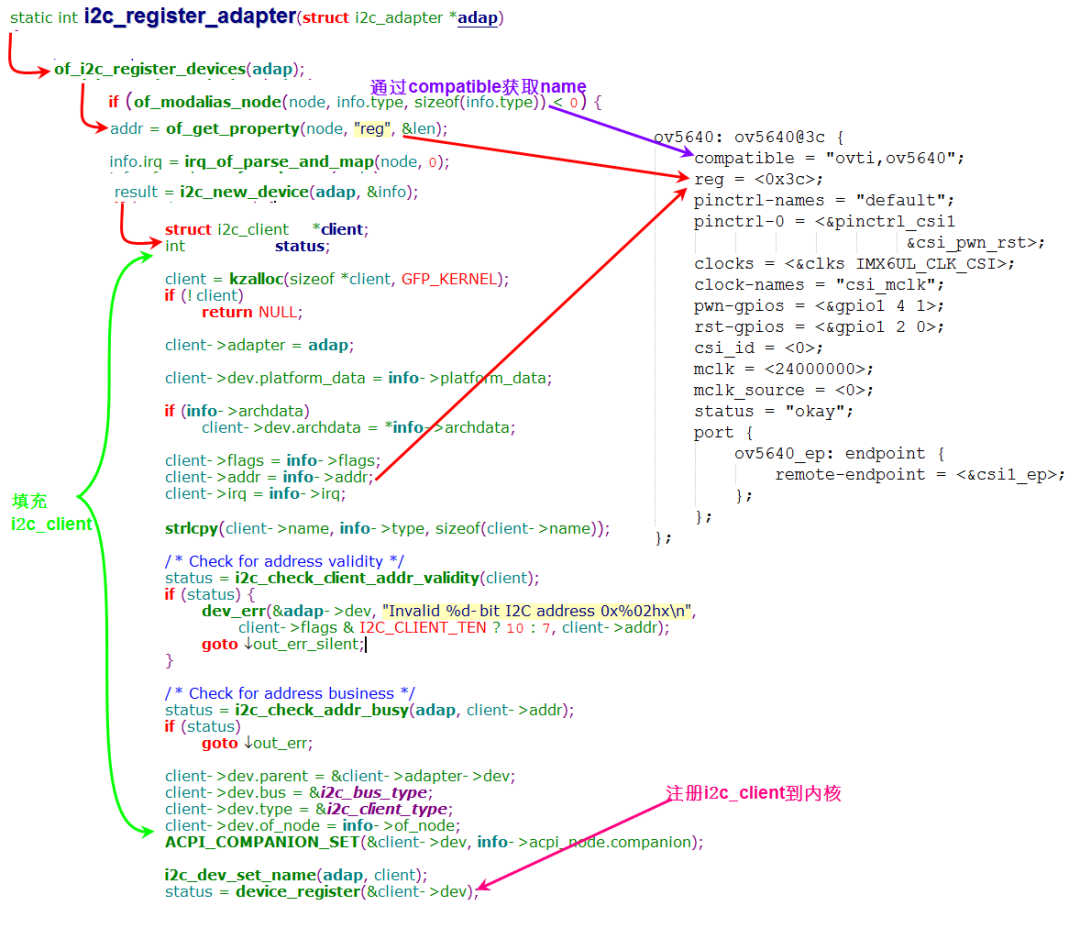
在有设备树的情况下,i2c_client的生成是要在控制器驱动adapter注册情况下从设备树中枚举出来的。
i2c控制器有很多种,不同的厂家都会设计自己特有的i2c控制器,但是不论哪一个控制器,最终都会调用 i2c_register_adapter()注册控制器驱动。
i2c_client生成流程如下:
从第二章第3节可知,驱动程序中 module_i2c_drive()这个宏其实最终是调用 i2c_add_driver(&(ov5640_i2c_driver));注册ov5640_i2c_driver结构体;当我们insmod加载驱动模块文件时,会调用i2c_add_driver()。
该函数定义如下:
#define i2c_add_driver(driver) \
i2c_register_driver(THIS_MODULE, driver)
下面我们来追踪i2c_register_driver()这个函数:
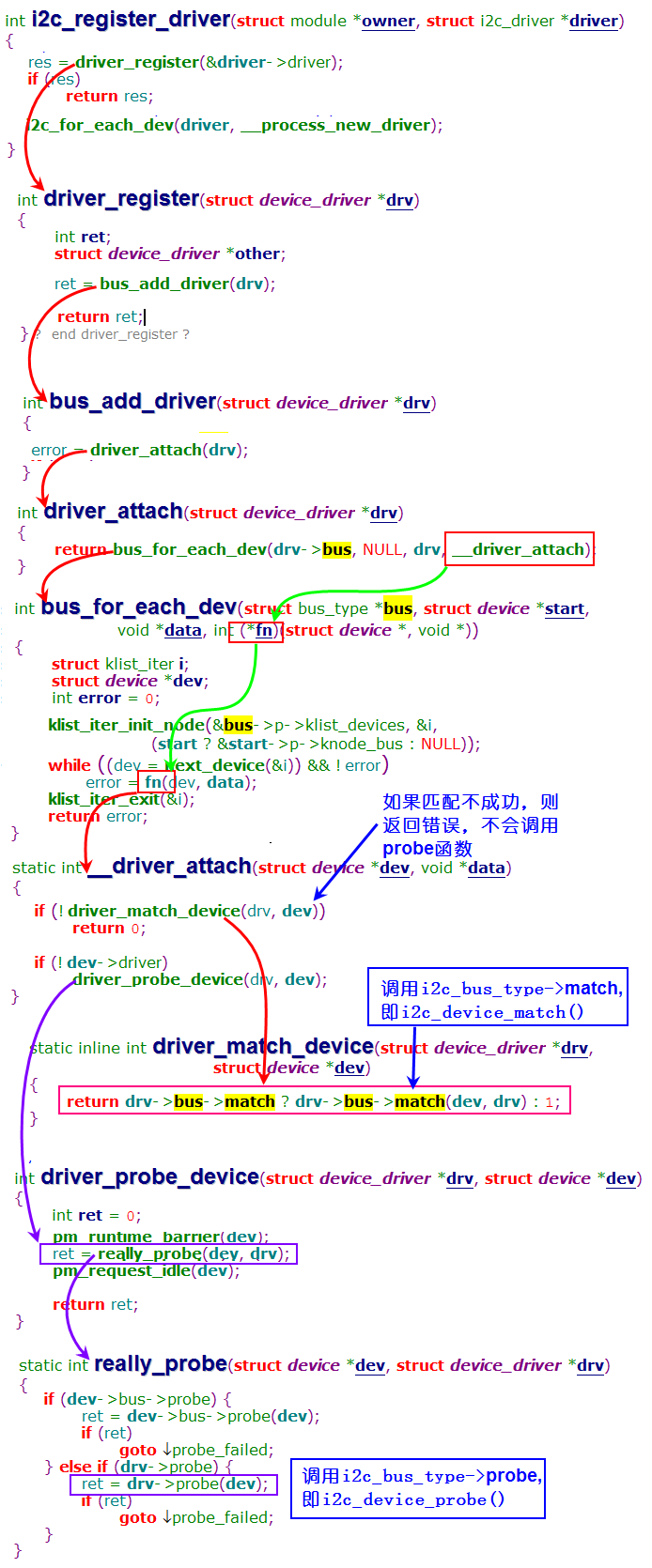 其中drv->bus就是我们之前所说的i2c_bus_type,上图中,分别调用了.match、.probe:
其中drv->bus就是我们之前所说的i2c_bus_type,上图中,分别调用了.match、.probe:
struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
.pm = &i2c_device_pm_ops,
};
下面我们来追一追这两个函数
如下图所示,通过driver->probe()调用到我们定义的struct i2c_driver ov5640_i2c_driver结构体变量中的ov5640_probe()函数:
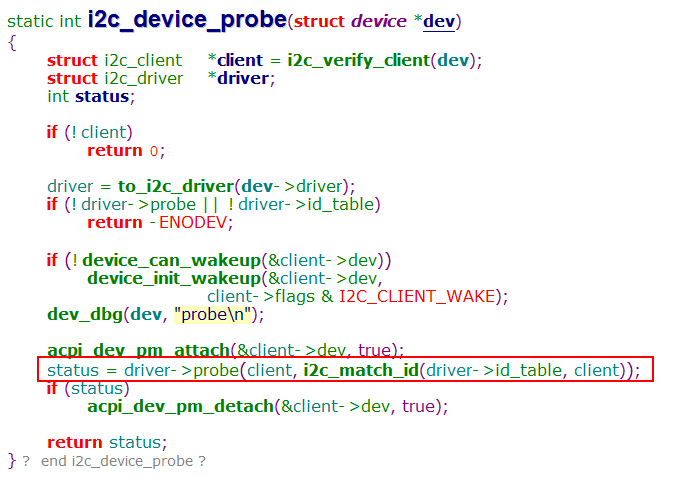
【注意】 内核代码中大量使用到driver = to_i2c_driver(dev->driver);通过通用的结构体变量成员struct device_driver *driver来查找自己注册的xx_driver地址。

其他网友提问汇总
1. 两个线程,两个互斥锁,怎么形成一个死循环?
2. 一个端口号可以同时被两个进程绑定吗?
3. 一个多线程的简单例子让你看清线程调度的随机性
4. 粉丝提问|c语言:如何定义一个和库函数名一样的函数,并在函数中调用该库函数
推荐阅读
进群,请加一口君个人微信,带你嵌入式入门进阶。

点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
